Задание №1. Интерполяция
1. Сконструировать произвольную функцию  , непрерывную на интервале
, непрерывную на интервале  . Создать два вектора
. Создать два вектора  и
и 
 , где
, где  – случайное число, равномерно распределенное на отрезке
– случайное число, равномерно распределенное на отрезке  .
.
2. По исходным данным 
 построить интерполяционный полином Лагранжа. Построить графики исходных данных и полинома Лагранжа. Протабулировать полином Лагранжа на промежутке
построить интерполяционный полином Лагранжа. Построить графики исходных данных и полинома Лагранжа. Протабулировать полином Лагранжа на промежутке  в девяти равноотстоящих точках.
в девяти равноотстоящих точках.
2. По исходным данным провести линейную интерполяцию. Построить графики исходных данных и интерполяционной функции. Найти значение интеграла в пределах от интерполяционной функции.
3. Интерполировать исходные данные с помощью кубических сплайнов с использованием функций lspline, pspline, cspline. Построить графики исходных данных и интерполяционных функций. Экстраполировать значение функции в точке  .
.
 Решение
Решение
Зададим функцию
Создадим два вектора

|

|
 , где – случайное число, равномерно распределенное на отрезке .
, где – случайное число, равномерно распределенное на отрезке .

|

|
 Построим график исходных данных
Построим график исходных данных
Рис. 1. Исходные данные
Создадим функцию, определяющую интерполяционный полином Лагранжа:

|
Построим графики исходных данных и полинома Лагранжа.

Рис. 2. Интерполяционный полином Лагранжа




 Протабулируем полином Лагранжа на промежутке [0,2] в девяти равноотстоящих точках табулированием
Протабулируем полином Лагранжа на промежутке [0,2] в девяти равноотстоящих точках табулированием
Проведем линейную интерполяцию с помощью функции linterp(x,y,t), где
x – вектор действительных значений аргумента (обязательно должны идти в порядке возрастания  );
);
y – вектор действительных значений данных той же размерности;
t – значение аргумента, при котором вычисляется интерполяционная функция.
Построим графики исходных данных и интерполяционной функции.

Рис. 3. Линейная интерполяция
|

|
Для интерполяции сплайнами используется функция interp. Перед применением функции interp необходимо предварительно определить первый из ее аргументов — векторную переменную s.
Делается это при помощи одной из трех встроенных функций тех же аргументов (х, у):
• lspline (х, у) — вектор значений коэффициентов кубического сплайна с интерполяцией линейными функциями на граничных точках;
• pspline (х, у) — вектор значений коэффициентов кубического сплайна с интерполяцией квадратичными функциями на граничных точках;
• cspline(х,у) — вектор значений коэффициентов кубического сплайна с интерполяцией кубическими функциями на граничных точках:
Выбор конкретной функции сплайновых коэффициентов влияет на интерполяцию вблизи конечных точек интервала.
Интерполируем исходные данные с использованием сплайнов:

Рис. 4. Сплайновая интерполяция
Экстраполируем значение функции в точке 

|
Задание №2. Оптимизация динамических систем
Пусть дан объект, динамика которого определяется функцией: 
Построить частотные характеристики данного объекта: КЧХ  , ФЧХ
, ФЧХ  и АЧХ
и АЧХ  . Найти частоту
. Найти частоту  , начиная с которой АЧХ
, начиная с которой АЧХ  , найти значение ФЧХ при этой частоте. Для замкнутой системы с интегральным регулятором
, найти значение ФЧХ при этой частоте. Для замкнутой системы с интегральным регулятором  (T – варьируемый параметр настройки регулятора), передаточная функция по внутреннему каналу действия возмущения принимает вид
(T – варьируемый параметр настройки регулятора), передаточная функция по внутреннему каналу действия возмущения принимает вид  . Построить график КЧХ системы при T=10:
. Построить график КЧХ системы при T=10:  . Определить такое значение параметра настройки регулятора T, при котором интегральный квадратичный критерий качества регулирования системы принимает минимальное значение
. Определить такое значение параметра настройки регулятора T, при котором интегральный квадратичный критерий качества регулирования системы принимает минимальное значение  → min. Построить график
→ min. Построить график  , показать на нем минимальное значение и значение Т, на котором оно достигается.
, показать на нем минимальное значение и значение Т, на котором оно достигается.
Решение
Пусть дан объект, динамика которого определяется функцией: 
Зададим функцию и определим все частотные характеристики:

|

|

|

|

|
Построим график КЧХ динамического объекта


Рис. 5. КЧХ динамического объекта
Построим АЧХ и ФЧХ динамического объекта

Рис. 6. АЧХ и ФЧХ динамического объекта
Определим частоту и значение  . Для чего по графику определим начальное приближение к корню:
. Для чего по графику определим начальное приближение к корню:

|

|

|
Определим передаточную функцию замкнутой системы по внутреннему каналу действия возмущения с интегральным регулятором (T – варьируемый параметр настройки регулятора):

|

|
Построим график КЧХ замкнутой системы:

|

|

Рис. 7. График КЧХ замкнутой системы
Построим график интегрального квадратичного критерия качества регулирования системы → min.


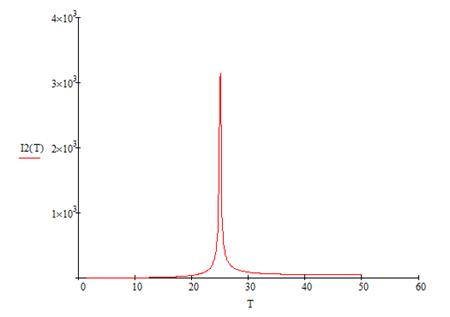
Рис. 8. График интегрального квадратичного критерия качества регулирования
Задание №3. Двумерная аппроксимация
Получить экспериментальные значения в матрице М размерностью 5х5:  , где
, где  – случайное возмущение,
– случайное возмущение,  и
и  ,
,  , где значения параметров
, где значения параметров  взять произвольно. Построить аппроксимацию данных моделью
взять произвольно. Построить аппроксимацию данных моделью  . Определить невязку и сравнить исходные значения параметров модели и полученные в ходе аппроксимации.
. Определить невязку и сравнить исходные значения параметров модели и полученные в ходе аппроксимации.
Решение
Получим экспериментальные данные в матрице M:

|

|

|

|

|
Зададим функцию невязки по узлам аппроксимации:

|
Зададим начальные значения искомых коэффициентов и найдем минимум функции невязки

|

|

|

|

|

|

|

|
Постоим аппроксимирующую функцию



|

Рис. 9. Двухмерная аппроксимация