Для упрощения анализа управляемости автомобиля с эластичными шинами рассматривается установившееся движение автомобиля на повороте с постоянным радиусом траектории и постоянной скоростью. Показатели инерционных свойств машины при этом обычно не учитываются. Кроме этого, используется упрощенная модель автомобиля, когда пару шин на одной оси представляют одной шиной с удвоенной боковой жесткостью (рис. 2).
При движении машины на повороте на средних и высоких скоростях влиянием центробежной силы, приложенной к центру тяжести, пренебрегать нельзя. Для уравновешивания центробежной силы, действующей на автомобиль, шины должны развивать соответствующие боковые реактивные силы в контакте с дорогой. Известно, что боковая сила, действующая на шину, создает угол бокового увода. Поэтому, когда машина движется со средними или высокими скоростями, для всех четырех колес существуют углы бокового увода.
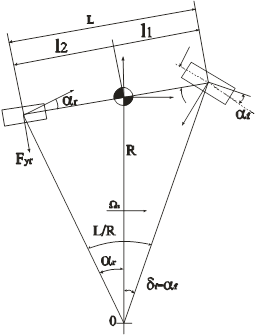
Рис. 2 Упрощенная модель установившегося поворота автомобиля
Из геометрии, показанной на рис. 2, взаимосвязь между углом поворота передней шины df, радиусом поворота R, колесной базой L и углами увода передней dа и задней df. шин будет следующей:
 ;
; 
Из выражения видно, что угол поворота передней шины, требуемый для движения по заданной кривой, является функцией не только радиуса поворота, но также и переднего dа и заднего df углов увода. Углы увода dа и d f зависят от боковой силы на передней af и задней ar осях и боковой жесткости шин.
Первые можно определить из равновесия автомобиля в поперечном направлении. Вторые – требуют проведения соответствующих испытаний или использования эмпирических формул.
При малых углах поворота боковые силы на передней и задней осях приблизительно составят;
 ;
;  ;
;
где W - полный вес машины; V - скорость движения вперед; g - ускорение свободного падения.
Нормальные нагрузки на передние  и задние
и задние  колеса в статических условиях выражаются следующими зависимостями:
колеса в статических условиях выражаются следующими зависимостями:
 ;
;  .
.
Следовательно:  и
и  .
.
Поэтому углы бокового увода будут:
 ; и
; и  .
.
где  и
и  – боковая жесткость каждой из передних и задних шин соответственно.
– боковая жесткость каждой из передних и задних шин соответственно.
Боковая жесткость конкретной шины измеряется в зависимости от большого числа эксплуатационных параметров, включающих давление воздуха в шинах, нормальную нагрузку, тяговую (или тормозную) и боковую силы. Их можно рассматривать как постоянные величины только в ограниченном диапазоне эксплуатационных условий.
Объединяя показанные выше формулы, получим выражение для угла поворота переднего управляемого колеса, необходимого для движения по данной кривой:

Данное уравнение является фундаментальным, отражающим поведение автомобиля при установившемся повороте. Это уравнение показывает, что угол поворота необходимый для движения по данной кривой, зависит от колесной базы, распределение веса по осям, скорости движения и боковой жесткости шин.
В связи с тем, что соотношение углов бокового увода колес автомобиля влияет на величину угла и радиуса поворота, возможны три характеристики поворачиваемости автомобиля:
– избыточная поворачиваемость-  ;
;
– недостаточная поворачиваемость-  ;
;
– нейтральная поворачиваемость (нормальная) - dп=dз
Первая характеристика, с точки зрения обеспечения большей маневренности, является предпочтительной для автомобиля, когда требуется обеспечить малый радиус поворота при конструктивно ограниченных углах поворота управляемых колес. Однако, принимая такое решение, следует помнить, что при уменьшении радиуса поворота возрастает действующая на автомобиль центробежная сила, в результате чего увеличивается и увод шин. Но при этом, чем больше увод, тем меньше радиус поворота автомобиля, а значит, ещё больше становится центробежная сила. Такой процессможет привести к потере устойчивости движения автомобиля по заданной (требуемой) траектории, что конечно, не желательно и не безопасно. Кроме этого автомобиль с избыточной поворачиваемостью, может самопроизвольно входить в поворот при действии боковой силы, даже при не повернутых управляемых колесах.
Для автомобилей с избыточной поворачиваемостью при разгоне с постоянным радиусом поворота водитель должен уменьшать угол поворота, а когда машина разгоняется фиксированным положением рулевого колеса, радиус ее поворота уменьшается рис. 3.
При воздействии боковой силы, приложенной к центру тяжести автомобиля с избыточной поворачиваемостью, который первоначально двигался по прямой линии, передние шины создают угол бокового увода, меньший, чем угол бокового увода задних шин. В результате появляется разворачивающее движение, и машина поворачивается против действия силы (рис..4).
Для автомобилей с избыточной поворачиваемостью можно определить критическую скорость Vcrit:
 .
.
Критическая скорость – это скорость, при которой дополнительный угол поворота рулевого колеса, необходимый для движения на каком-либо повороте, равен нулю (рис.5).
Для автомобиля с избыточной поворачиваемостью коэффициент Kus в уравнении имеет отрицательный знак, из-за этого у машины критической является скорость, выше которой такая машина проявляет курсовую неустойчивость.

Рис. 3. Курсовая реакция при приложении боковой силы к центру тяжести автомобиля с нейтральной недостаточной поворачиваемостью

Рис..4. Кривая реакции при фиксированном угле поворота для автомобилей с нейтральной, недостаточной и избыточной поворачиваемостью

Рис.5. Зависимость угла поворота от скорости автомобиля с нейтральной, недостаточной и избыточной поворачиваемостью. (постоянный радиус R30м; колесная база L=3м.
Для автомобиля с недостаточной поворачиваемостью (вторая характеристика поворачиваемости) при разгоне с постоянным радиусом поворота водитель должен увеличить угол поворота. Или другими словами, когда машина разгоняется при фиксированном положении рулевого колеса, радиус ее поворота увеличивается, рис 11. При действии боковой силы, приложенной к центру тяжести автомобиля с недостаточной поворачиваемостью, его передние шины создают угол бокового увода, больший, чем угол бокового увода задних шин. В результате машинаповорачивает в сторону действия боковой силы, рис. 11.
Действие боковой силы на автомобиль, обладающий недостаточной поворачиваемостью, никакой опасности для потери устойчивости не приведет. (До тех пор пока составляющие этой системы, действующие на каждую ось автомобиля, не превысят сил сцепления этих осей с дорогой). Центробежная сила, возникающая при этом, будет направлена в сторону, примерно противоположную внешней боковой силе, и будет нейтрализовать её действие.
Для автомобиля с недостаточной поворачиваемостью можно определить характеристическую скорость Vchar.. Характеристическая ско рость – это скорость, при которой угол поворота рулевого колеса, необходимый для обеспечения движения с постоянным радиусом, равен 2L/R (рис. 3):
Для автомобиля с нейтральной поворачиваемостью при равенстве углов бокового увода передних и задних шин: dа=df., угол поворота, необходимый для обеспечения движения по заданной кривой, не зависит от скорости движения и определяется по уравнению:
 .
.
Коэффициент недостаточной поворачиваемости, равный отношению углов увода передних и задних шин, в этом случае равняется нулю.
Если автомобиль с нейтральной поворачиваемостью разгоняется при постоянном радиусе поворота водитель должен сохранять одно и то же положение рулевого колеса. Когда машина разгоняется с фиксированным положением рулевого колеса, радиус его поворота остается одинаковым (рис..4).
Когда автомобиль с нейтральной поворачиваемостью движется по прямому направлению и на него действует боковая сила, приложенная в центре тяжести, то на передних и задних шинах должны создаваться одинаковые углы бокового увода. В результате такой автомобиль будет двигаться по прямолинейному пути с постоянным углом отклонения от заданного направления рис. 3.
Таким образом, наиболее рациональным соотношением бокового увода шин, с точки зрения устойчивости движения автомобиля и отсутствия большого увеличения радиуса поворота, считается такое, при котором обеспечивается наибольшая недостаточная поворачиваемость автомобиля, хотя это несколько ухудшает его маневренность (общую поворачиваемость).
Необходимое соотношение углов увода может быть обеспечено двумя способами (мероприятиями):
– соответствующим распределением нормальных нагрузок на колесо, а значит, в большинстве случаев, действующих на колеса составляющих боковой силы;
– давление воздуха в шинах, влияющего на величину коэффициента избыточной поворачиваемости.
– в меньшей степени, за счет элементарного распределения окружных сил по колесам различных осе, но эти силы настолько переменны, что это, как правило, нельзя применить практически.
На характеристику поворачиваемости автомобиля может влиять и такой конструктивный фактор, как выбор кинематической схемы подвески определяющей крен поперечный колес и корпус автомобиля при движении на повороте.