КАЧЕСТВО САР
7.1. Понятие качества и показатели качества систем
управления.
7.2. Точность системы управления.
7.3. Прямые и косвенные показатели качества.
7.4. Интегральные показатели качества.
7.5. Приближённая оценка качества по частотным
характеристикам модели второго порядка.
7.6. Исследование качества САР в MATLAB
7.1. Понятие качества и показатели качества систем
управления.
Если система устойчива, то необходимо оценить её качество, под которым понимают совокупность свойств, обеспечивающих эффективное функционирование всей системы управления в целом. Свойства, составляющие эту совокупность и имеющие количественные измерители, называют показателями качества.
Методы оценки качества процесса управления могут быть самыми разными, но определяются они в основном тремя факторами. Во-первых, они зависят от выбора критерия качества (когда систему считать хорошей, когда плохой); во-вторых, от исследуемого режима работы системы (в переходном режиме ошибки управления намного больше, чем в установившемся, а, значит, и методы исследования должны быть разными); в-третьих, от характеристик воздействий.
Изменение режима работы автоматической системы возникает в результате прикладываемых к ней внешних воздействий. При этом возможны различные режимы работы системы в зависимости от заданного закона изменения выходной переменной и внешних возмущающих воздействий. Внешнее возмущение в виде переменной нагрузки наиболее существенно для систем стабилизации управляемой переменной на заданном уровне. Основная задача при этом состоит в том, чтобы создать систему, которая не реагировала бы на это воздействие (инвариантная задача).
Внешнее воздействие на входе системы наиболее характерно для программных и следящих систем. При этом надо так выбрать параметры и структуру системы, чтобы это воздействие воспроизводилось с минимальной ошибкой (ковариантная задача). В общем случае все эти воздействия на систему являются сложной функцией времени.
Точность системы управления.
Рассмотрим систему управления, состоящую из регулятора WP(s), объекта W0(s), на входе которого действует возмущение, и звена обратной связи Woc(s) (рис. 7.1).

Рис. 7.1
Сигнал ошибки
e = D = хз – хос = eз + ef,
содержит составляющую eз, которая характеризует точность выполнения системой функции воспроизведения задающего воздействия, и несколько составляющих ef, которые в сумме характеризуют точность выполнения функции подавления возмущений. Поэтому необходимо знать передаточные функции системы по этим составляющим.
Передаточная функция по заданию хз – х (так как рассматриваем линейные системы, то можно использовать принцип наложения, поэтому принимаем f =0):

передаточная функция по возмущению f – x (рис. 7.2, хз = 0):

Рис. 7.2

передаточная функция по ошибке e - хз

Уравнение динамики для сигнала ошибки можно представить в этом случае в следующем виде

Следовательно, в типовой одноконтурной системе, состоящей из объекта, регулятора и звена обратной связи полная ошибка и её составляющие и в статике и в динамике пропорциональны [1+Wp(s)Wo(s)Woc(s)]-1. Это выражение в статическом режиме равно
(1 + kр kоkос)-1 = (1+kраз)-1 = S = DХз / D Хp
и называется коэффициентом статизма. Ошибка возникает только в статической системе и точность тем лучше, чем больше передаточный коэффициент разомкнутого контура kраз. Здесь DХз – отклонение регулируемой величины при замкнутом и DХp разомкнутом контуре регулирования.
Например, чтобы получить установившуюся относительную погрешность менее 1%, необходимо выбрать k = 99. Однако при k > kГР система становится неустойчивой. Действительно, требование устойчивости для системы третьего порядка, состоящей из трёх апериодических звеньев с постоянными Т1, Т2, Т3 и коэффициентами передачи k1, k2 и k3 состоит в том, чтобы выполнялось условие
(Т1Т2 + Т1Т3 + Т2Т3)(Т1 + Т2 + Т3) – Т1Т2Т3(1 +k) > 0.
Отсюда
kГР = 2 + Т1/T2 + T1/T3 + T2 /T1 + T2/T3 + T3/T1 + T3/T2 ,
т.е. зависит от отношения постоянных времени. Если Т1 = Т2 = Т3, то kГР = 8, что находится в противоречии с требованием малости e.
Разрешение конфликта между требованием устойчивости и малой установившейся погрешностью возможно путём увеличения интервала между постоянными времени.
Качество систем управления исследуется при типовых входных сигналах.
Пример: дана система, состоящая из двух апериодических звеньев первого порядка с постоянными времени Т1, Т2 и коэффициентами передачи k1 и k2, соответственно (рис. 7.3).
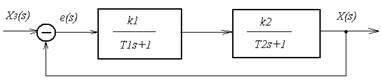
Рис. 7.3
Передаточная функция замкнутой системы

Пусть на вход системы подается ступенчатая функция хз = С. Если система устойчива, то после окончания переходного процесса регулируемая величина х принимает установившееся значение х = ху. Так как в статическом режиме все производные по х равны нулю (s = 0), то

Таким образом, установившееся значение регулируемой координаты х отличается от заданного значения С и ошибка

и зависит от амплитуды входного сигнала.
Относительная погрешность в установившемся режиме, или коэффициент статизма
S = e /C = e / xз = (1 + k) -1.
Включим последовательно интегрирующее звено (рис.7. 4).

Рис. 7.4
Передаточная функция замкнутой системы

В статике при хз = С, х = ху = хз = С, и установившаяся ошибка e = ху – С = 0. Такие системы являются астатическими.
Ошибки в системе управления могут возникать и из-за изменения параметров объекта управления, например, коэффициента передачи. Рассмотрим систему, представленную на рис. 7.5. Пусть k = k+∆k. Тогда
Ошибка из-за изменения коэффициента равна

если ∆ k<<k. Таким образом, параметрическая ошибка также уменьшилась в (1 +k) раз.

Рис. 7.5
Необходимые расчётные соотношения для анализа статики системы могут быть найдены на основании передаточных функций и теоремы операционного исчисления о предельном значении функции

Пример: Определить, статическая или астатическая система управления, изображённая на рис. 7.6, при ступенчатом входном воздействии.

Рис. 7.6
Передаточная функция системы для сигнала ошибки е

Изображение входного сигнала XЗ(s) = L[A(t)] = A/s. Тогда
ε(s)= We(s)XЗ(s),

На основании теоремы о предельном переходе

Следовательно, статическая ошибка не равна нулю и пропорциональна входному сигналу, поэтому рассматриваемая система статическая.
Пример: Определить, статическая или астатическая система управления, изображённая на рис. 7.7, при ступенчатом входном воздействии.

Рис. 7.7
Запишем передаточную функцию для сигнала ошибки

Выражение для сигнала ошибки системы

И

Следовательно, данная система является астатической по заданию.
Если действует несколько возмущений на систему, то в зависимости от её структуры и вида внешних воздействий она может быть статической по отношению к одним возмущениям и астатической по отношению к другим. В большинстве случаев интерес представляет статическая ошибка системы по отношению к нагрузке (возмущению), приложенному к объекту управления.
Рассмотрим случай, когда нагрузка f действует на входе объекта управления (рис. 7.1). В этом случае изображение сигнала ошибки по возмущению имеет вид

 .
.
По теореме о предельном переходе найдём статическую ошибку системы при скачкообразном изменении нагрузки f(s) = A/s:

Для системы, астатической по нагрузке, требуется, чтобы

Пусть

Передаточная функция ошибки системы по заданию

Тогда

Следовательно, система является астатической по заданию.
Найдём передаточную функцию сигнала ошибки по нагрузке:

Выражение сигнала ошибки по нагрузке

и при скачкообразном изменении нагрузки

Рассматриваемая система является астатической и по нагрузке.
Таким образом, астатизм может быть достигнут соответствующим включением интегрирующего звена в прямую цепь системы управления по отклонению, так как это звено в статике имеет бесконечно большой коэффициент усиления

При включении двух интегрирующих звеньев достигается астатизм второго порядка (γ = 2) и устраняется установившаяся ошибка от внешнего воздействия, изменяющегося с постоянной скоростью. Астатизм достигается также включением изодромных звеньев.
Установившееся значение ошибки eЗ воспроизведения задающего воздействия еЗ(t), являющегося произвольной, но достаточно плавной функцией времени, можно определить с помощью коэффициентов ошибок С0, С1, С2,..., определяемых по формуле

Коэффициенты ошибок вычисляются по передаточной функции Wef(s) для ошибки слежения и её производным по s при s = 0:

В статической системе С0 = 1/(1 + k), в астатической С0 = 0, С1 = 1 /k и передаточный коэффициент к разомкнутой системы называют добротностью по скорости. Постоянное воздействие хз = const в этом случае не создает установившейся ошибки.
При двух интегрирующих звеньях в прямой цепи системы С0 = С1 = 0 и С2 = 1/k. Эта система является астатической второго порядка, коэффициент k называют добротностью по ускорению. В такой системе постоянное воздействие, а также воздействие, пропорциональное времени, не создает установившейся ошибки.
Могут быть системы с астатизмом и более высоких порядков.
C помощью коэффициентов ошибки можно определить и установившееся значение ef, создаваемой возмущением f, если оно является аналитической функцией времени.
Формулы для первых четырёх коэффициентов ошибок воспроизведения eз и возмущения ef приведены в [17].
Важным свойством астатических САР является то, что для систем с порядком астатизма g первые g коэффициентов ошибки С0, С1, …, Сg-1 равны 0.
Следовательно, соответствующие ошибки в установившемся режиме работы системы отсутствуют.
Современные методы анализа качества процесса управления можно разделить на две группы – прямые и косвенные.
7.3. Прямые и косвенные показатели качества.
Эти методы требуют решения дифференциального уравнения, т.к. показатели качества определяются по кривой переходного процесса, возникающего в системе при ступенчатом внешнем воздействии. Переходную функцию системы h(t) можно получить и экспериментально.
В зависимости от характера затухания при скачкообразном воздействии переходный процесс может быть монотонным, апериодическим или колебательным в зависимости от корней характеристического уравнения. Процесс является монотонным, если отклонение управляемой переменной от нового установившегося значения при t ® ¥ только уменьшается. Процесс считается апериодическим, если имеет место не более одного перерегулирования относительно начального и конечного значений управляемой переменной. Процесс называется колебательным, если управляемая переменная в течение переходного процесса несколько раз отклоняется в обе стороны от конечного установившегося значения.