|
рисунок 4 классический контур регулирования
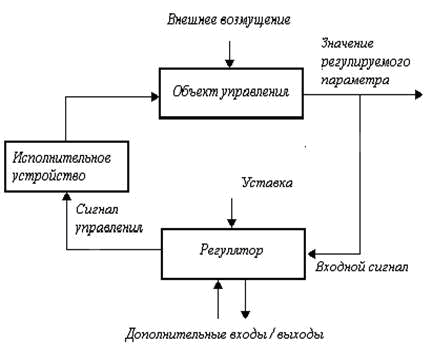
Работа регулятора осуществляется на основе постоянного анализа регулируемого параметра, характеризующего состояние объекта, для чего к входу регулятора подключают датчик. Информационная связь между датчиком, измеряющим регулируемый параметр, и входом регулятора называется обратной связью. Так образуется замкнутый контур управления, а сама система управления называется замкнутой. Вообще понятие “обратная связь” является фундаментальной категорией в теории управления. Именно благодаря наличию обратной связи с объектом становится возможным реализовывать действительно качественное, можно сказать, зрячее управление. Определение регулятора, приведенное выше, было взято из энциклопедии и, честно говоря, не очень удачное. Регулятор — это не обязательно отдельное устройство. Дело в том, что в современных АСУ ТП функции регулятора реализуются в рамках прикладной программы управления на уровне контроллера. Так один промышленный контроллер может программно реализовать до тысячи регуляторов. Это современный подход к построению систем управления; тем не менее, локальные регуляторы, выполненные в виде отдельных устройств, по сей день активно используются там, где не требуется столь мощного функционала.
Какие регуляторы бывают? Совершенно разные: предельные двухпозиционные регуляторы, пропорциональные регуляторы (P-регуляторы), регуляторы с таймером или задержкой и т.д. Апофеозом развития регуляторов явилось появление пропорционально-интегро-дифференциального регулятора (ПИД-регулятора, PID по-английски), который во многих случаях позволил достичь оптимального качества управления, и о котором далее пойдет речь. В современных АСУ ТП PID-регулирование является фундаментальным элементом управления непрерывными процессами, этакой основой всех основ
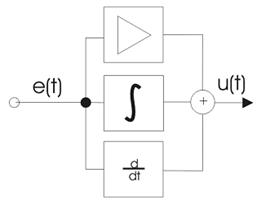
Как работает ПИД-регулятор? ПИД-регулятор — это звено в контуре управления с обратной связью, используемое для поддержания заданного значения измеряемого параметра. ПИД-регулятор измеряет отклонение стабилизируемой величины от заданного значения (так называемой уставки) и генерирует управляющий сигнал, являющийся суммой трёх слагаемых, первое из которых пропорционально этому отклонению, второе пропорционально интегралу отклонения и третье пропорционально производной отклонения. Если какие-то из составляющих слагаемых не используются, то регулятор соответственно называют пропорционально-интегральным, пропорционально-дифференциальным, пропорциональным и т. п. На рисунке 5 показана упрощенная функциональная схема ПИД-регулятора:
|
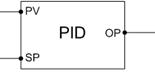
Назначение ПИД-регулятора заключается в поддержании некоторой величины PV на заданном значении SP с помощью изменения другой величины OP, где; PV – измеряемый параметр (process value);
SP – заданное значение измеряемого параметра (уставка, setpoint); OP – управляющее воздействие (output); Разность (SP-PV) называется ошибкой или рассогласованием. В зависимости от объекта регулирования можно выбрать более простую реализацию ПИД регулятора: П; ПИ; ПД.
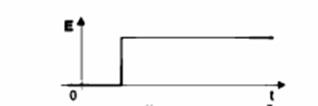
Единичное ступенчатое воздействие на входе регулятора PV. рисунок 6
Реакция пропорциональной части на выходе регулятораOP на ступенчатое воздействие со входа PV.Реализация П-регулятора. Выбор коэффициента пропорциональности КР (= 1); (≥ 1); (≤1). Рисунок 7

Если говорить простыми словамиреализация П-регулятора это управление внастоящем времени.
Реакция пропорциональной и интегральных частей на выходе регулятора ОР на ступенчатое воздействие со входа PV. Реализация ПИ- регулятора. Выбор времени интегрирования Т И (от 0 до бесконечности). Предполагаем, что КР уже был выбран. Рисунок 8
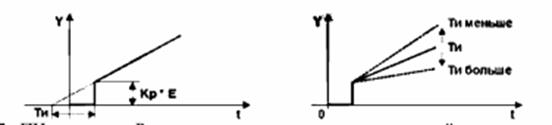
Если говорить простыми словамиреализация ПИ-регулятора это управление в настоящем времени П- составляющая, плюс исправление допущенных ранее ошибок за время интегрирования И-составляющая.
Реакция пропорциональной и дифференциальной составляющих на выходе регулятора ОР на ступенчатое воздействие со входа PV. Реализация ПД- регулятора. Выбор времени дифференцирования ТД (от 0 до бесконечности). предполгаем, что КР уже был выбран
Рисунок 9. 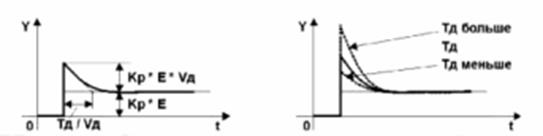
Если говорить простыми словами реализация ПД-регулятора это управление внастоящем времени П-составляющая, плюс попытка воздействовать на будущее поведение системы Д-составляющая.
Реализавция ПИД- регулятора из ПД- регулятора путем ввода в ПД –регулятор времени интегрирования. Рисунок 10
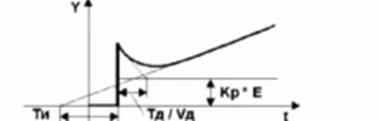
Если говорить простыми словами реализация ПИД –регулятора это управляю настоящим П, гашу возникшие долги И, инвестирую в будущее Д. От того насколько правильно будут подобраны эти три составляющих, настолько быстрей и с меньшими волнениями пройдет переходный процесс регулирования.
Процесс настройки PID-регулятора состоит в основном из задания уставки и значений указанных выше трех коэффициентов. Существует несколько математических методов вычисления оптимальных коэффициентов PID-регулятора исходя из обеспечения наибольшей устойчивости системы. Однако на практике настройка регулятора проводится эмпирическим методом (так сказать “на глазок”). В современных АСУ ТП зачастую применяются так называемые самонастраивающиеся PID-регуляторы, которые путем подачи на объект единичного воздействия и анализа ответной реакции автоматически выставляют если не оптимальные, то достаточно хорошие коэффициенты. Более того, существуют алгоритмы адаптированного PID-регулирования, предполагающие автоматическую корректировку (подстройку) коэффициентов регулирования в процессе управления. С их помощью можно достичь очень высокого качества управления даже в сильно нелинейных системах. Как было отмечено, качество управления сильно зависит от настройки коэффициентов регулятора. На рисунке 11 показано поведение системы при некорректной настройке PID Рисунок11. 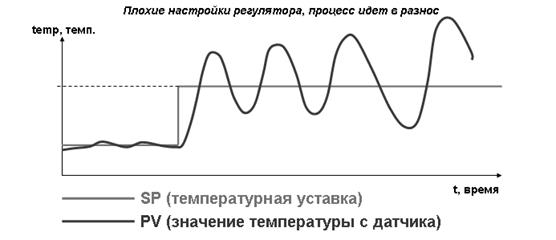 Здесь оператор решил поменять уставку. Как видно из рисунка, регулятор не способен отработать корректно, и наблюдается расходящийся колебательный процесс. Система явно не устойчива.
Здесь оператор решил поменять уставку. Как видно из рисунка, регулятор не способен отработать корректно, и наблюдается расходящийся колебательный процесс. Система явно не устойчива.
На рисунке 12 показан переходный процесс при правильных настройках регулятора. Оператор опять меняет температурную уставку, но регулятор на этот раз отрабатывает корректно. Наблюдается некоторое перерегулирование, но в целом процесс быстро сходится. Рисунок 12 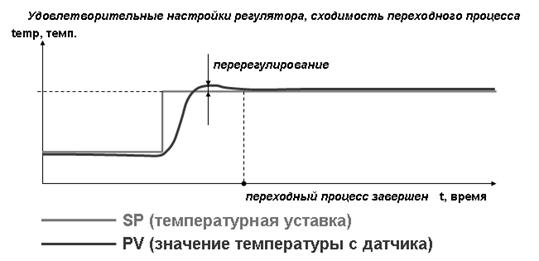
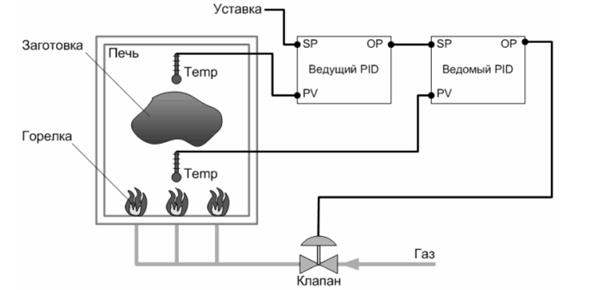
Каскадное регулирование Классический пример. Нагреватель печи (горелка в нашем случае) имеет избыточную мощность, и объект нагрева (заготовка) может с одной стороны перегреться, а с другой - остаться холодным. Если подобный режим нагрева недопустим, то одноконтурного управления будет уже недостаточно. Для обеспечения равномерного нагрева объекта необходимо измерять температуру уже в двух местах: рядом с нагревателем и в самом холодном месте. В таком случае регулятор должен содержать два ПИД - звена, включенных последовательно. Первое ПИД-звено (называемое ведущим), на вход которого подается значение температуры в холодном месте, будет вырабатывать значение уставки для второго звена (называемого ведомым). На вход ведомого звена подается температура около нагревателя (см. рисунок 13). Такая структура регулирования двух с помощью последовательно включенных ПИД - регуляторов, имеющая два входа для параметров измерения и один управляющий выход, называется каскадной. Для эффективного управления необходимо, чтобы ведомый PID-регулятор был быстрее, чем ведущий. Рисунок 13
Вопросы для самоконтроля 1.Структурная схема контура регулирования. 2. Упрощенная функциональная схема ПИД регулятора. 3. Виды единичных воздействий на входе и реакции на выходе: П; ПИ; ПД; ПИД. 4. Процесс настройки ПИД регулятора. 5. Каскадное регулирование.