ЛАБОРАТОРНАЯ РАБОТА № 2
Программирование промышленных контроллеров Modicon M340 на языке LD в среде UNITY PRO
Цель работы: Изучение и практическое освоение методов программирования промышленных логических контроллеров (ПЛК) Modicon M340 фирмы Schneider-Electric для автоматического управления уровнем жидкости в расходном баке.
Задания:
1. Освоить алгоритм управления и составить релейно-контактную схему управления уровнем жидкости в расходном баке на базе этого алгоритма.
2. Составить программу управления ПЛК на языке LD и проверить ее работоспособность с помощью среды UNITY PRO.
3. Загрузить программу в ПЛК и проверить ее соответствие заданному алгоритму автоматического управления количеством жидкости
в расходном баке с помощью лабораторного стенда.
Оборудование
Программное обеспечения: программная среда для программирования ПЛК UNITY PRO S V4.0.
Аппаратное обеспечение: Лабораторный стенд с ПЛК Modicon M340, модулями вводов-выводов и периферийным оборудованием.
Общая постановка задачи
Разработать программу автоматического управления пускателем насоса для поддержания заданного уровня жидкости в расходном баке.
Для определения уровня жидкости в баке используются два датчика уровня – датчик верхнего уровня (LS2) и датчик нижнего уровня (LS1). По мере расхода жидкости срабатывает сначала датчик LS2, а затем – датчик LS1. После срабатывания датчика LS1 включается подкачивающий насос М1 и бак заполняется жидкостью до тех пор, пока датчик LS2 не вернется в исходное положение. После этого подкачивающий насос отключается.
Схема установки приведена на рис. 1.

Рисунок 1 – Схема технологической установки.
Последовательность выполнения работы
Лабораторная работа № 2 состоит из следующих этапов:
Этап 1. Запуск программной средыUNITY PRO,создание проекта иаппаратной конфигурации.
Этап 2. Создание переменных.
Этап 3. Создание программы пользователя на языкеLD.
Этап 4. Проверка и отладка программы пользователя с помощьюэмулятора ПЛК.
Этап 5. Привязка переменных к входным и выходным каналам ПЛКи проверка программы на стенде.
Этап 1 – запуск программной среды UNITY PRO, создание проекта и аппаратной конфигурации
Запуск программной среды UNITY PRO производится либо через меню ПУСК операционной системы Windows, либо двойным нажатием левой кнопки «мыши» на иконке программы, расположенной на рабочем столе компьютера. После запуска программы экран компьютера примет вид, представленный на рис. 2.

Рисунок 2 – Окно программы UNITY PRO
Для решения поставленной задачи можно выбрать ПЛК М340 с
процессорным модулем ВМХ Р34 2020 и блоком питания BMX CPS 2000.
Сигналы от датчиков LS1 и LS2 должны поступать через два дискретных входа, а сигнал на включение пускателя насоса М1 – через дискретный выход. Для подключения датчиков и пускателя можно использовать модуль дискретных входов-выходов BMX DDM 16025.
Последовательность действий по созданию проекта и конфигурации модулей М340 (рис. 5):
1. Создание проекта (File->New).
2. Выбор модуля BMX P34 2020 (окно выбора процессорных модулей) на рис. 3.

Рисунок 3 - Выбор модуля BMX P34 2020.
3. На первом посадочном месте выбирается модуль BMX DDM 16025 (двойное нажатие левой кнопки «мыши» на первом посадочном месте) на рис. 4.

Рисунок 4 - Выбор модуля BMX DDM 16025.
4. Записать проект на диск с именем Lab_01_LD (меню File-> Save).

Рисунок 5 – Конфигурация модулей ПЛК М340
Этап 2 – Создание переменных
Для датчиков уровня LS1 и LS2 создаются входные переменные типа
EBOOL, а для пускателя насоса – выходная переменная М1 (рис. 4). Для удобства отладки программы указанные переменные создаются нелокализованными, т.е. не привязываются к адресам входов и выходов.
Дополнительно создаются внутренние переменные R1 и R2, которые фиксируют состояние датчиков уровня.
Последовательность действий для создания переменных:
1. В окне проекта (Project Browser) выбирается позиция редактора переменных (Variables & FB instances->Elementary Variables).
2. В каждую строку редактора переменных вносятся соответствующие записи (см. рис. 6).
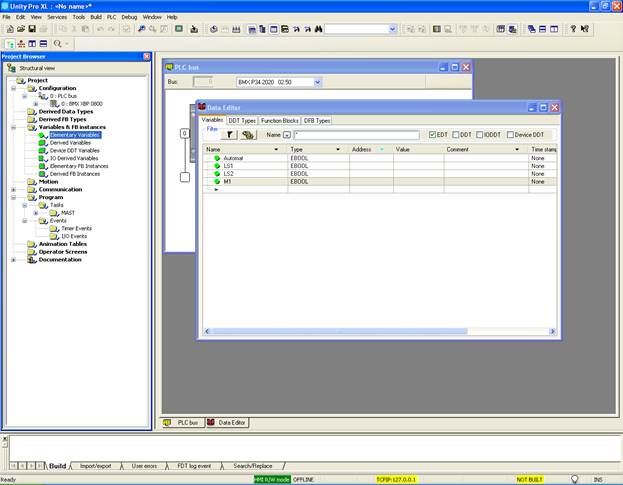
Рисунок 6 – Редактор переменных
Этап 3 – создание программы пользователя на языке LD
В редакторе LD набираем программу. В результате должно получиться изображение, соответствующее рис. 7.
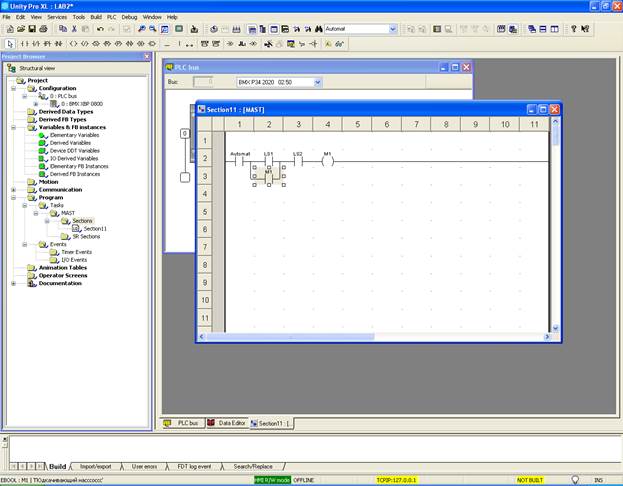
Рисунок 7 – Вид программы пользователя в редакторе LD
Этап 4. Проверка и отладка программы пользователя с помощью эмулятора ПЛК.
Проверка и отладка программы пользователя проводятся с помощью имитатора ПЛК. Перед загрузкой программы пользователя в имитатор ПЛК выполняется компиляция проекта. Для этого в пункте главного меню «Build» (рис. 9) Выбирается подпункт «Rebuild All Project». Затем устанавливается соединение с имитатором ПЛК «PLC->Connect» и проект загружается в имитатор по команде «PLC->Transfer Project to PLC». ПЛК переводится в режим RUN по команде «PLC->RUN».