2.1. Разработка функциональной схемы системы управления

Рис 2.1. Принципиальная электрическая схема
На рис. 2.1 приведена принципиальная электрическая схема системы управлении числом оборотов электродвигателя постоянного тока с независимым возбуждением и тиристорным преобразователем (ТП). В качестве датчика для применении оборотов используется тахогенератор. Напряжение на выходе тахогенератора пропорционально числу оборотов вала двигателя. Это напряжение сравнивается с заданным напряжением, которое пропорционально требуемому значение числа оборотов двигателя. Рассогласования поступают на блок управления (БУ). В блоке управления реализована функция. ПИ- регулятора.
Функциональная схема системы управления приведена на рис.2.2. Функцию задатчика выполняет потенциометр на входе системы. В регуляторе осуществляется преобразование разности между задаваемым напряжением и напряжением на выходе тахогенератора. Это преобразование осуществляется в соответствии с ПИ- законом управления.

Рис.2.2. Функциональная схема системы управления
Объект управления включает в себя тиристорный преобразователь и двигател, с подключенной к нему нагрузкой.
Функцию датчика выполняет тахогенератор, преобразующий число оборотов в сигнал напряжения (обратная связь).
2.2. Математические модели элементов системы управления
Математические модели элементов системы управления могут быть представлены в виде обыкновенных дифференциальных уравнений или в операторной форме (в виде передаточных функций).
В общем виде линейное дифференциальное уравнение имеет вид:

здесь  – выходной сигнал;
– выходной сигнал;
 – входной сигнал;
– входной сигнал;
 – коэффициенты.
– коэффициенты.
Применяя преобразовании Лапласа к левой и правой части уравнения и используя свойство линейности преобразования и следующие выражения:


получим модель в операторной форме:

Отсюда, согласно определению передаточной функции, находим:

Математическая модель двигателя постоянного тока с независимым возбуждением
При получении модели двигателя необходимо получить два дифференциальных уравнения.
Первое уравнение записывается для цепи якоря по второму закону Кирхгофа:

Второе уравнение движение привода:

где  ,
,
здесь  – напряжение якоря (входной сигнал, сигнал управления);
– напряжение якоря (входной сигнал, сигнал управления);
 – сопротивление и ток обмотки якоря;
– сопротивление и ток обмотки якоря;
 – полная индуктивность якорной цепи;
– полная индуктивность якорной цепи;
 - электромагнитный момент и момент сопротивления (входной сигнал, возмущение);
- электромагнитный момент и момент сопротивления (входной сигнал, возмущение);
 – момент инерции привода с двигателем;
– момент инерции привода с двигателем;
 угловая скорость якоря (выходной сигнал);
угловая скорость якоря (выходной сигнал);
 – коэффициенты.
– коэффициенты.
Запишем уравнения (2.3) и (2.4) в операторной форме:


Из алгебраического уравнения (2.6) находим  :
:

Выражение (2.7) подставляем в уравнение (2.5) и группируем составляющие с выходным сигналом  в правой части, а составляющие с входными сигналами
в правой части, а составляющие с входными сигналами  в правой части:
в правой части:

Обозначим:
 – электрическая постоянная времени двигателя;
– электрическая постоянная времени двигателя;
 - механическая постоянная времени.
- механическая постоянная времени.
Окончательно получим:

Операторная модель может быть представлена в виде блок- схемы:

Рис. 2.3. Блок-схема модели электродвигателя постоянного тока
Математическая модель тиристорного преобразователя
Двигатель постоянного тока получает питание от тиристорного преобразователя ТП, который преобразует напряжение сети переменного ток в выпрямленное напряжение  , приложенное к цепи якоря двигателя.
, приложенное к цепи якоря двигателя.
Динамическую модель тиристорного преобразователя можно представить апериодическим звеном 1-го порядка:

 – напряжение, которое управляет работой ТП. Постоянная времени преобразователя не превосходит 0,01 с.
– напряжение, которое управляет работой ТП. Постоянная времени преобразователя не превосходит 0,01 с.
Математическая модель регулятора
В замкнутых системах управления зачастую используют стандартные законы управления, которые имеют различные комбинации пропорциональной, интегральной и дифференциальной составляющих регулятора.
В частности интегрально- дифференциальное уравнение ПИД регулятора имеет вид:

Или в оперативной форме:

В уравнениях (2.10) и (2.11):
 выходной сигнал регулятора,
выходной сигнал регулятора,
 ошибка регулирования,
ошибка регулирования,
 настраиваемые коэффициенты, пропорциональной, интегральной и дифференциальной составляющих регулятора.
настраиваемые коэффициенты, пропорциональной, интегральной и дифференциальной составляющих регулятора.
Рассмотрим передаточную функцию наиболее распространенного ПИ- регулятора.

где  ,
,  .
.
В уравнении (2.12) показаны два вида реализации регулятора с «развязанными» настройками и «связанными» настройками.
 развязанные настройки регулятора.
развязанные настройки регулятора.
 коэффициент усиления регулятора и постоянная интегрирования («развязанные» настройки).
коэффициент усиления регулятора и постоянная интегрирования («развязанные» настройки).
Математическая модель датчика
В качестве датчика в системе используется тахогенератор, который генерирует напряжение, пропорциональное числу оборотов вала двигателя:


Математическая модель задатчика
Заданное значение число оборотов двигателя устанавливается с помощью потенциометр на входе системы.


На основе полученных передаточных функций составляем блок схему системы управления (рис 2.4.).

Рис.2.4. Блок-схема системы автоматического управления ДПТ
2.3. Временные и частотные характеристики элементов системы управления. Корни характеристического полинома
Согласно определению передаточная функция – это отношение преобразования Лапласа выходного сигнала к преобразованию Лапласа входного сигнала при нулевых начальных условиях, т.е.:

где  входной и выходной сигналы соответственно.
входной и выходной сигналы соответственно.
Основные временные характеристики звеньев или системы – это переходная функция и весовая функция.
По определению переходная функция  – это реакция звена или системы на единичное ступенчатое воздействие
– это реакция звена или системы на единичное ступенчатое воздействие  .
.
Преобразование Лапласа от равняется  . Таким образом, используя формулу (2.16), запишем функции и выражение для переходной функции:
. Таким образом, используя формулу (2.16), запишем функции и выражение для переходной функции:

По определению весовая функция  – это реакция звена или системы на дельта- функцию
– это реакция звена или системы на дельта- функцию  . Преобразование Лапласа от
. Преобразование Лапласа от  равняется 1. По аналогии с переходной функцией запишем:
равняется 1. По аналогии с переходной функцией запишем:

В формулах (2.17) и (2.18) оператор  обозначает обратное преобразование Лапласа.
обозначает обратное преобразование Лапласа.
Рассмотрим частотные характеристики, к ним относятся: амплитудно- частотная характеристика АЧХ, фазо- частотная характеристика ФЧХ, логарифмическая амплитудно- частотная характеристика ЛАЧХ и амплитудно- фазовая характеристика АФХ.
Для получения частотных характеристик необходимо перейти к частотной передаточной функции системы; заменой  . Частотная передаточная функция
. Частотная передаточная функция  является функцией комплексной переменной и может быть представлена в декартовой и полярной системе координат.
является функцией комплексной переменной и может быть представлена в декартовой и полярной системе координат.


где  амплитудно частотная характеристика;
амплитудно частотная характеристика;
 фазочастотная характеристика.
фазочастотная характеристика.
Амплитудно- фазовая частотная характеристика строится на комплексной плоскости. Она представляет собой геометрическое место концов векторов частотной передаточной функции (2.19), при изменении частоты от нуля до бесконечности.
Логарифмическая амплитудно- частотная характеристика строится на основании выражения:

Корни характеристического полинома
Передаточная функция системы или звена в общем виде записывается в виде отношения двух полиномов (2.2). Полином знаменателя

называется характеристическим полиномом. Корни характеристического полинома, т.е. решения уравнения:  называются полюсами передаточной функции
называются полюсами передаточной функции  . Вид корней характеристического полинома определяет характер переходных процессов в системах управления и на их основе базируются ряд методов расчета систем управления.
. Вид корней характеристического полинома определяет характер переходных процессов в системах управления и на их основе базируются ряд методов расчета систем управления.
2.4. Технология получения основных характеристик системы в пакете Math Lab (SimuLink)
Техника работы с пакетом Math Lab и встроенным пакетом SimuLink подробно изложено в [2] В данном разделе выделены основные процедуры, которые используются в курсовой работе.
Для запуска программы необходимо предварительно запустить пакет MATLAB и далее с помощью ярлыка панели инструментов запустить приложение SimuLink. Используя библиотеки SimuLink, создаем модель исследуемой системы.
Рассмотрим порядок построения характеристик системы по каналу управления, т.е. проанализируем влияние сигнала  (см. рис. 2.4). Блок-схема объекта по каналу управления с учетом данных таблицы 2.2 выглядит следующим образом:
(см. рис. 2.4). Блок-схема объекта по каналу управления с учетом данных таблицы 2.2 выглядит следующим образом:

Рис.2.5. Блок-схема объекта по каналу управления
Определим параметры моделей элементов системы автоматического регулирования с помощью исходных данных, представленных в таблице 2.1.
Исходные данные
Таблица 2.1
| № | Наименование | Размерность | Обозначение | Численное значение |
| Номинальное число оборотов двигателя | 
| 
| ||
| Номинальный ток якоря | А | 
| ||
| Сопротивление якорной цепи | Ом | 
| 0,09 | |
| Индуктивность якорной цепи | мГн |
| 12,5 | |
| Номинальный момент | Нм | 
| ||
| Момент инерции приведенной к валу двигателя | кг 
|
| ||
| Постоянное времени тиристорного преобразователя | c | 
| 0,01 | |
| Максимальное выходное напряжение ТП | В | 
| ||
| Максимальное число оборотов двигателя |
| 
|
Расчет параметров тиристорного преобразователя:
Примем максимальное значение сигналов  равным 1.
равным 1.
Коэффициент усиления тиристорного преобразователя равняется:

Расчет параметров двигател, как объекта управления
Коэффициенты  в системе СИ рассчитываются как отношение номинального момента к номинальному току якоря :
в системе СИ рассчитываются как отношение номинального момента к номинальному току якоря :

Электрическая и механическая постоянная времени двигателя равны:


Коэффициент усиления двигателя по каналу управления:

Коэффициент усиления по каналу возмущения:

Расчет параметров датчика (тахогенератора):

Расчет параметров задатчика:

Результаты расчета сведены в табл.2.2.
Параметры элементов системы управления
Таблица 2.2
| № | Наименование | Размерность | Обозначение | Численное значение |
| Коэффициент усиления тиристрного преобразователя (ТП) | В | 
| ||
| Постоянная времени ТП | с |
| 0,1 | |
| Коэффициент усиления двигателя по каналу управления | 
| 
| 0,5 | |
| Коэффициент усиления объекта по каналу возмущения | 
| 
| 0,0225 | |
| Электрическая постоянная времени двигателя | с | 
| 0,139 | |
| Механическая постоянная времени двигателя | с | 
| 1,13 |
Для создания модели используем кнопку  на панели инструментов и в окне модели создаем следующую схему.
на панели инструментов и в окне модели создаем следующую схему.

Рис.2.6. Схема моделирования объекта по каналу управления
В пакете SimuLink в качестве обозначения оператора Лапласа используется символ s вместо p.
Для того чтобы получить временные, частотные характеристики и поле нулей и полюсов передаточной функции необходимо выполнить команду Linear Analysis в меню Tools/ Control Design, при этом открывается окно Control and Estimation Tools Manager. (Рис. 2.7).

Рис.2.7. Окно Control and Estimation Tools Manager
В выпадающем списке можно выбрать одну из характеристик и затем осуществить анализ модели кнопкой (Linearize Model). При анализе системы доступны следующие виды характеристик:
Step – переходная функция
Impulse – весовая функция
Bode – логарифмические амплитудная и фазовая частотные характеристики
Bode Magnitude – логарифмическая амплитудно- частотная характеристика
Nyquist – диаграмма Найквиста, амплитудно- фазовая характеристика при 
Pole/ Zero – нули и полюса системы.
Для получения нескольких характеристик в меню EDIT окно LTI- Viewer необходимо выбрать Plot Configuration и определить вариант представления графиков. На рис. 2.8 представлены временные характеристики системы: весовая и переходная функция; на рис. 2.9 логарифмические амплитудно- частотные и фазо- частотные характеристики на рис. 2.10 амплитудно- фазовая характеристика и на рис. 2.11 нули и полюса передаточной функции.

Рис.2.8. Весовые и переходные функции по каналу управления ДПТ

Рис.2.9. Логарифмическая амлитудно-частотная и физочастотная характеристики

Рис.2.10. Амлитудно-фазовая характеристика объекта

Рис.2.11. Нули и полюса передаточной функции
Для того чтобы получить характеристики по каналу возмущения необходимо собрать схему (рис. 2.12) и воспользоваться вышеприведенной процедурой получения временных характеристик.

Рис.2.12. Схема моделирования объекта по каналу возмущения и частотных характеристик
2.5. Качество процесса управления
В разделе 2.4 получены временные и частотные характеристики объекта по каналу управления и по каналу возмущения (без использования системы управления).
В приведенных на рис. 2.1, рис. 2.2 и рис. 2.4 схемах используется принцип управления по обратной связи.
Использование этого принципа управления позволяет:
· Компенсировать возмущения, действующие на объект управления
· Обеспечивать требуемое качество работы системы управления в целом.
2.5.1. Точность работы системы управления
Рассмотрим в общем виде структуру замкнутой системы с отрицательной обратной связью.

Рис.2.13. Блок- схема системы управления с отрицательной обратной связью
На схеме:  передаточные функции задатчика, датчика, регулятора и объекта управления соответственно;
передаточные функции задатчика, датчика, регулятора и объекта управления соответственно;
 – преобразование Лапласа сигналов: задания, выходного, ошибки, управления и сигнала обратной связи соответственно.
– преобразование Лапласа сигналов: задания, выходного, ошибки, управления и сигнала обратной связи соответственно.

Передаточная функция замкнутой системы по заданию

Если разорвать обратную связь, то можно получить передаточную функцию разомкнутой системы:

Точность системы характеризуется ошибкой системы в установившемся состоянии согласно предельной теореме:

В зависимости от входного сигнала  определяется ошибка по положению, если - ступенчатый сигнал и ошибка по скорости, если линейно растущий сигнал.
определяется ошибка по положению, если - ступенчатый сигнал и ошибка по скорости, если линейно растущий сигнал.
Если ошибка по положению не равна нулю, то система называется статической.
Если ошибка по положению равна нулю, а ошибка по скорости не равна нулю, система называется астатической первого порядка.
В общем случае вводится понятие порядка астатизма,  , системы. Порядок астатизма равен числу нулевых корней характеристического полинома передаточной функции разомкнутой системы (2.24).
, системы. Порядок астатизма равен числу нулевых корней характеристического полинома передаточной функции разомкнутой системы (2.24).
Использование ПИ – регулятора, который имеет один нулевой корень, позволяет создать астатическую систему, систему с нулевой ошибкой в установившемся состоянии.
2.5.2. Показатели качества переходного процесса
Для оценки качества замкнутой системы управления можно использовать непосредственно графики переходного процесса.
Оценка качества работы системы осуществляется с помощью следующих показателей:
Время переходного процесса определяется, как время от момента приложения на входе единичной ступенчатой функции до момента, после которого выполняется условие 

где  - заданная величина, представляющая допустимую ошибку в системе управления рис. 2.14.
- заданная величина, представляющая допустимую ошибку в системе управления рис. 2.14.
Перерегулирование – определяется формулой:

(См. рис.2.14)

Рис.2.14. График переходного процесса в замкнутой системе управления
2.5.3. Частотные методы оценки качества
Для оценки качества работы системы частотными методами используются такие понятия, как запас устойчивости по амплитуде и запас устойчивости по фазе. Данные показатели можно определить, используя частотные характеристики разомкнутой системы. Подробно эти методы рассмотрены в  .
.
Удобнее определять запас устойчивости системы по показателю колебательности  . Он определяется как отношение максимального значения амплитудно-частотной характеристики к ее значению
. Он определяется как отношение максимального значения амплитудно-частотной характеристики к ее значению  т.е.
т.е.

2.5.4. Корневые методы оценки качества
Вид корней характеристического номинала замкнутой системы определяет характер переходного процесса в системе автоматического управления.
Приближенно время переходного процесса можно определить по формуле:

где  это расстояние от мнимой оси до ближайшего корня или действительного или комплексно сопряженных рис. 2.15.
это расстояние от мнимой оси до ближайшего корня или действительного или комплексно сопряженных рис. 2.15.
Для оценки запаса устойчивой системы используется такой показатель как колебательность, который определяется как отношение минимальной части корня  к действительной
к действительной

Ограничение колебательности задается двумя лучами, которые составляют с вещественной осью угол 

2.5.5. Интегральные критерии качества
Интегральные критерии качества применяются для целей анализа и синтеза систем автоматического управления.
Ниже рассмотрено описание этих критериев с учетом использовании их для синтеза системы управления в пакете MathLab [ 2 ].
1. Интеграл от абсолютной ошибки в замкнутой системе (IEA – Integral of Absolute value of Error):

2. Критерий произведения времени и абсолютной ошибки (ITAE – Integral of Time multiplied by Absolute value of Error):

3. Квадратичный интеграл от ошибки в замкнутой системе (ISE – Integral Squared Error):

4. Модифицированный квадратичный критерий (ITSE – Integral of Time multiplied by Squared Error).

2.6. Синтез системы автоматического управления
Рассмотрим процедуру синтеза системы автоматического управления с помощью пакета MatLab. В основе процедуры лежит метод корневого годографа. В результате расчетов необходимо выбрать регулятор и определить его параметры таким образом, чтобы обеспечить требования к качеству работы системы управления.
Корневой годограф – это траектория корней характеристического полинома замкнутой системы при изменении какого- либо параметра системы, как правило, в качестве этого параметра используется коэффициент усиления регулятора.

Рис.2.15. Окно Control and Estimation Manager
Используя пакет Simulink, соберем схему модели объекта по каналу управления (Рис. 2.6) (Данная схема может быть ранее сохранена на диске в МАТ файле как LTI – модель объекта).
Используя меню Tools /Control Design/ Linear Analysis, получаем окно Control and Estimation Tools Manager. Нажимаем кнопку Linearize Model и получаем окно LTI Viewer. В меню этого окна выбираем File /Export/. И экспортируем файл в рабочее пространствоWorkspace как obj. MAT.
Вводим команду rltool в рабочем окне MatLab. В программе открывается два окна: SISO дизайн-окно проектирования с одним входом и одним выходом; Control and Estimation Tools Manager – окно управления проектированием (рис. 2.15).
С помощью кнопки Control Architecture можно модифицировать структуру системы управления.
С помощью кнопки System Date зададим структуру и параметры элементов системы.
В окне System Date активируем в таблице строку G – модель объекта управления. Появляется окно Model Import. Активируем строку OBJ и импортируем модель объекта в структуру системы управления, если они заранее сохранены в качестве MAT файлов. Для рассматриваемого случая задаем коэффициент усиления задатчика (F) и датчика М.
После задания параметров в системе в окне SISO Design появляется годограф замкнутой системы с пропорциональным регулятором.
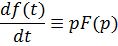
Рассмотрим порядок работы с окном SISO Design. Для того чтобы модифицировать окно необходимо стрелку поместить в поле графика и нажать правую кнопку. Пункт меню Grid позволяет нанести сетку с постоянными значениями угла φ и колебательностью системы.
Выбрав пункт меню Properties и закладку Limits можно изменить масштаб представления графиков таким образом, чтобы более подробно отразить участок годографа при переходе его через мнимую ось. (См. рис. 2.16). Параллельно с годографом можно вывести графики переходного процесса в системе, частотные характеристики, которые могут быть полезны при проектировании системы. Для этого в окне SISO Design выбираем пункт меню Analysis/Response to Step Command.
Подводим стрелку к годографу и нажимаем на левую кнопку. На рис. 2.17. получаем график переходного процесса в замкнутой системе. В нижней части окна SISO Design отображается значение коэффициента регулятора.
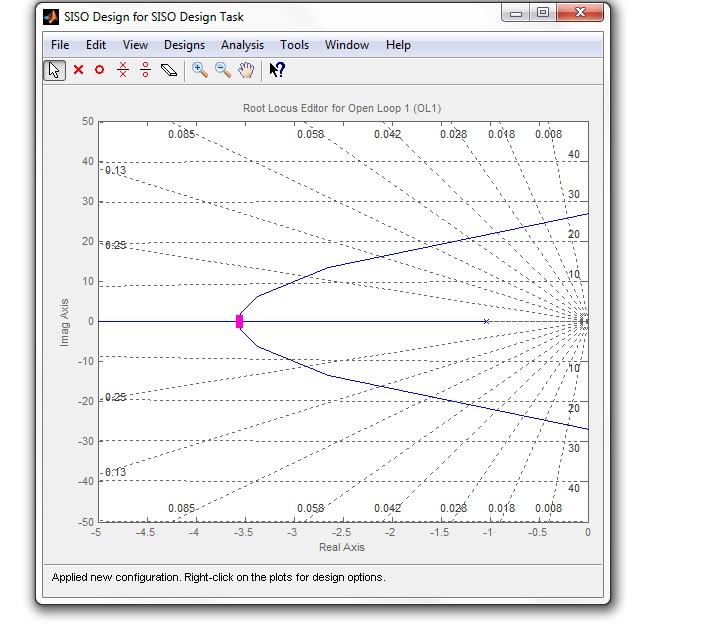
Рис.2.16. Вид окна после редактирования
Первоначально, (рис. 2.16) в разомкнутой системе корни находятся на вещественной оси, при замыкании системы и увеличении коэффициента усиления регулятора корни перемещаются навстречу друг другу, оставаясь вещественными (рис. 2.17).

Рис.2.17. Корневой годограф в системе с П-регулятором и график переходного процесса при 
На рис. 2.18 приведены графики для кратных корней при  , в этом случае мы получаем минимальное время переходного процесса без перерегулирования. При дальнейшем увеличении коэффициента усиления рис. 2.19 и 2.20 корни становятся комплексно сопряженными и по мере увеличения коэффициента усиление регулятора увеличивается колебательность. Приведенные на рис. 2.17 и 2.19 графики соответствуют системе с пропорциональным регулятором; эта система является статической и ошибка
, в этом случае мы получаем минимальное время переходного процесса без перерегулирования. При дальнейшем увеличении коэффициента усиления рис. 2.19 и 2.20 корни становятся комплексно сопряженными и по мере увеличения коэффициента усиление регулятора увеличивается колебательность. Приведенные на рис. 2.17 и 2.19 графики соответствуют системе с пропорциональным регулятором; эта система является статической и ошибка  в установившемся состоянии не равна нулю. При увеличении коэффициента усиления регулятора уменьшается.
в установившемся состоянии не равна нулю. При увеличении коэффициента усиления регулятора уменьшается.

Рис.2.18. Корневой годограф и график переходного процесса для кратных корней при

Рис.2.19. Корневой годограф и переходный процесс при 

Рис.2.20. Окно настройки и корневой годограф. Метод IMC
Для того чтобы перейти к настройке параметров ПИ – регулятора, активируем окно Control and Estimation Tools Manager и выберем закладку Automated Tuning. Выбираем метод проектирования Design method, PID Tuning. Для настройки могут быть использованы различные алгоритмы настройки (Tuning algorithm). Получим результаты настойки с помощью некоторых из них.
Internal Model Control (IMC). (рис. 2.20 и 2.21)

Расположение корней и полюсов, а также график переходного процесса для ITAE приведены на рис.2.20, 2.21.

Рис.2.21. Переходный процесс при настройке IMC
После выбора метода настройки Parameter search (поиск параметров) необходим конкретизировать критерий поиска см. раздел 2.55 IAE, ISE, ITAE, ITSE. Соответствующие графики приведены на рис. 2.22 – 2.25.
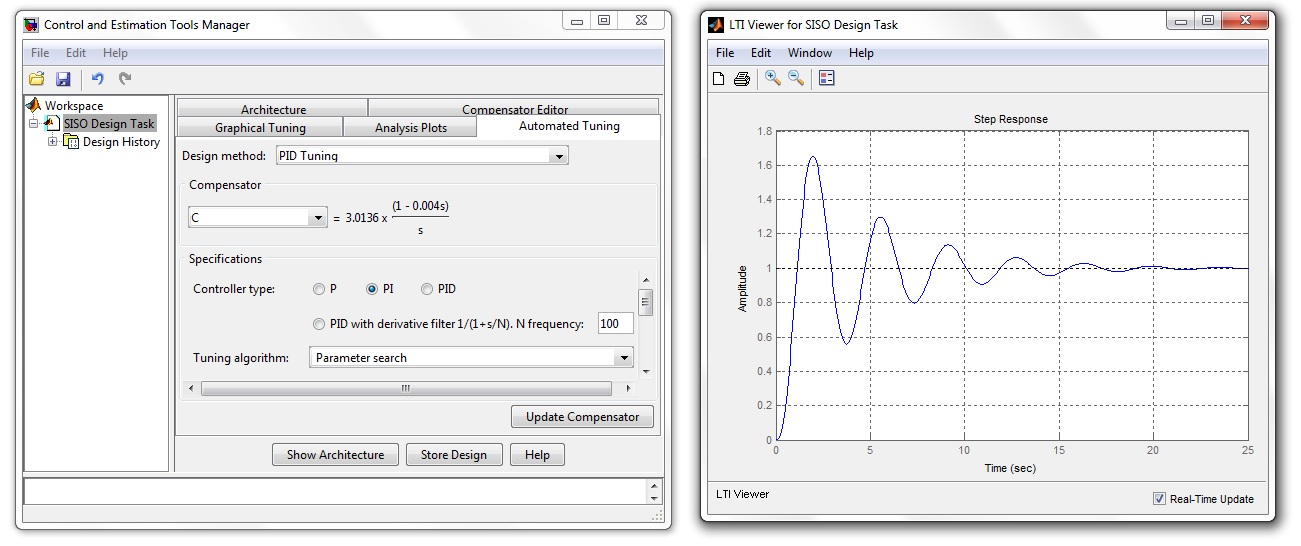
Рис.2.22. Результаты настройки для критериев IAE, ITAE, ITSE

Рис.2.23. Результаты настройки для критерия ISE
Скорректировать настройки PI регулятора, в частности интегральную составляющую, можно непосредственно перемещая «ноль» передаточной функции, это величина обратная постоянной интегрирования  (кружок на корневом годографе) в нужное место. Для того чтобы компенсировать максимальную постоянную времени (ближайший к мнимой оси полюс), ноль совмещают с данным полюсом, результат приведен на графике рис. 2.24.
(кружок на корневом годографе) в нужное место. Для того чтобы компенсировать максимальную постоянную времени (ближайший к мнимой оси полюс), ноль совмещают с данным полюсом, результат приведен на графике рис. 2.24.


Рис.2.24. Корневой годограф, переходный процесс и окно настройки при компенсации максимальной постоянной времени объекта
Пакет Simulink дает возможности использовать различные процедуры постройки РП, ПИ, ПИД и других регуляторов. Окончательный выбор остается за проектировщиком и определяется требованиями по качеству (точности) работы системы.
В последующих разделах будем использовать ПИ-регулятор с настройками  .
.  полученной составляющей передаточной функции объекта управления.
полученной составляющей передаточной функции объекта управления.
2.7. Моделирование работы системы автоматического управления при изменении нагрузки
В представленных выше разделах произведен синтез замкнутой системы регулирования числа оборотов двигателя постоянного тока. Пи расчете системы не учитывалось влияние нагрузки. Для того чтобы усилить работу системы при изменении нагрузки использовалась схема рис.2.25, момент нагрузки изменяется от 0 до 500 Нм ступенчато, при этом произошло максимальное изменение числа оборотов на 2,6 , время переходного процесса по каналу возмущения составило ориентировочно 4 секунды.
Рис.2.25. Моделирование работы системы управления по возмущению