СОДЕРЖАНИЕ
| Введение…………………………………………………………………… | |
| 1. Основные сведения о частотно-регулируемом электроприводе……….. | |
| 2. Преимущества использования регулируемого электропривода в технологических процессах…………………………………………………… | |
| 3. Структура частотного преобразователя………………………………… | |
| 4. Области применения преобразователей частоты……………………….. | |
| 5. Принцип работы преобразователей частоты…………………………… | |
| 6. Выбор преобразователя частоты ……………………………………….. | |
| 7.Преобразователь частоты HITACHISJ300-055HF ……………………… | |
| 8. Схемы подключения преобразователя частоты HITACHISJ300-055HF.. | |
| 9. Автоматизированная станция управления насосами……………………. | |
| 10. Связь преобразователя частоты с персональным компьютером……… | |
| Заключение…………………………………………………………………….. | |
| Список использованных источников………………………………………… |
Свидение технические характеристики преобразователей частоты Е3-9100 Модель E3-9100- 01H 02H 03H 05H 07H 10H 15H 20H Макс. выходная мощность двигателя, кВт 0,75 1,5 2,2 3,7 5,5 7,5 11 15 Номинальный выходной ток (А) 2.5 4 6 8 15 18 28 33 Макс. выходное напряжение (В) 3-фазное 380…480 В (пропорционально входному напряжению) Выходные характеристики Макс. выходная частота (Гц) 500 Гц (программируемая) Напряжение и частота электропитания (входное напряжение) 3-фазное 380…480 В (-15 % … +10 %) 50/60 Гц (± 5 %) Метод управления Синусоидальная ШИМ (управление U/f или векторное по выбору) Выходная частота 0,5 … 500 Гц Точность поддержания частоты Цифровое задание: ± 0,01 % (-10 °С … +50 °С). Аналоговое задание: ± 0,5 % (25 °С ±10 °С) Разрешение задания частоты Цифровое задание: 0,01 Гц (до 100 Гц); 0,1 Гц (свыше 100 Гц). Аналоговое задание: 0,1 Гц Разрешение выходной частоты 0,01 Гц Перегрузочная способность 150 % от номинального выходного тока в течение 1 минуты Сигнал задания частоты = 0 … +10 В (1…10 кОм), 4…20 мА (250 Ом), 0…20 мА (250 Ом) Время разгона/замедления 0,1 … 3200 с (независимая установка трех времен разгона / торможения) Тормозной момент Кратковременный средний момент торможения 001H: не менее 100%; 002H: не менее 50%; 003H: не менее 20% Длительный момент торможения: 20 % (150 % с внешним тормозным резистором; тормозной прерыватель встроен) Режимы работы - скалярный (постоянный/переменный момент); - векторное управление (без датчика обратной связи); - толчковый режим (ручной и автоматический); - автоматический подъем момента при увеличении нагрузки; -режим энергосбережения; - динамическое управление энергосбережением; - автонастройка. Диапазон регулирования скорости 100:1 Точность поддержания скорости 0,2 % - в векторном режиме Характеристики цепи управления Максимальный стартовый момент 200 % на частоте 1 Гц Защита от перегрузки двигателя Реле электронной тепловой защиты Мгновенная перегрузка по току Мгновенное отключение выходного напряжения при токе 250 % от номинального тока преобразователя. Перегрузка Отключение выходного напряжения через 1 мин при токе 150 % от номинального тока преобразователя. Перенапряжение Отключение выходного напряжения при напряжении цепи постоянного тока более 820 В Пониженное напряжение Отключение выходного напряжения при напряжении цепи постоянного тока менее 400 В Кратковременное отключение питания Выбор следующих возможностей: 1) останов при отсутствии питания дольше 15 мс; 2) продолжение работы при отсутствии питания менее 0,5 с; 3) постоянная работа. Перегрев радиаторов охлаждения Электронная защита Уровень предупреждения зависания Раздельная установка для разгона / торможения, включение / выключение при останове выбегом. Неисправность вентилятора Электронная защита (определение блокировки вентилятора) Замыкание в нагрузке Проверка К.З. на выходе при пуске двигателя Неисправность заземления Электронная защита Защитные функции Индикация заряда ВКЛ при напряжении в цепи постоянного тока выше 50 В Другие функции Многофункциональные дискретные входы Могут быть запрограммированы 76 функций для восьми дискретных входов. Выбор логики управления – отрицательная (NPN) или положительная (PNP).
Введение
В настоящее время у большинства специалистов, эксплуатирующих насосное оборудование, уже сложилось четкое представление о возможностях использования преобразователей частоты для привода насосов и насосных агрегатов. Понимание этого вопроса обусловлено интенсивным внедрением частотно-регулируемого привода за последние годы и накопленным опытом его эффективного использования.
Для всех видов перекачиваемой жидкости преобразователи частоты обеспечивают более экономичное, более эффективное и более надежное регулирование, чем известные механические способы. Независимо от области использования (добыча и транспорт нефти, электроэнергетика, жилищно-коммунальное хозяйство и т.д.) эффект от частотного регулирования насосов общеизвестен:
- экономия электроэнергии до 30 – 60 %;
- снижение утечек жидкостей до 5 %;
- экономия тепловой энергии до 10 %;
- увеличение срока службы оборудования в 1.5-2 раза;
- уменьшение вероятности возникновения разрывов трубопроводов;
- повышение эффективности защиты электропривода;
- улучшение экологической обстановки.
1. Основные сведения о частотно-регулируемом электроприводе
Частотный преобразователь в комплекте с асинхронным электродвигателем позволяет заменить электропривод постоянного тока. Системы регулирования скорости двигателя постоянного тока достаточно просты, но слабым местом такого электропривода является электродвигатель. Он дорог и ненадежен. При работе происходит искрение щеток, под воздействием электроэрозии изнашивается коллектор. Такой электродвигатель не может использоваться в запыленной и взрывоопасной среде.
Асинхронные электродвигатели превосходят двигатели постоянного тока по многим параметрам: они просты по устройству и надежны, так как не имеют подвижных контактов. Они имеют меньшие по сравнению с двигателями постоянного тока размеры, массу и стоимость при той же мощности. Асинхронные двигатели просты в изготовлении и эксплуатации.
Основной недостаток асинхронных электродвигателей – сложность регулирования их скорости традиционными методами (изменением питающего напряжения, введением дополнительных сопротивлений в цепь обмоток).
Управление асинхронным электродвигателем в частотном режиме до недавнего времени было большой проблемой, хотя теория частотного регулирования была разработана еще в тридцатых годах. Развитие частотно-регулируемого электропривода сдерживалось высокой стоимостью преобразователей частоты. Появление силовых схем с IGBT-транзисторами, разработка высокопроизводительных микропроцессорных схем управления позволили различным фирмам Европы, США и Японии создать современные преобразователи частоты доступной стоимости.
Известно, что регулирование частоты вращения исполнительных механизмов можно осуществлять при помощи различных устройств: механических вариаторов, гидравлических муфт, дополнительно вводимыми в статор или ротор резисторами, электромеханическими преобразователями частоты, статическими преобразователями частоты. Применение первых четырех устройств не обеспечивает высокого качества регулирования скорости, неэкономично, требует больших затрат при монтаже и эксплуатации.
Статические преобразователи частоты являются наиболее совершенными устройствами управления асинхронным приводом в настоящее время.
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту f1 питающего напряжения, можно в соответствии с выражением

при неизменном числе пар полюсов p изменять угловую скорость магнитного поля статора.
Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Регулирование скорости при этом не сопровождается увеличением скольжения асинхронного двигателя, поэтому потери мощности при регулировании невелики. Для получения высоких энергетических показателей асинхронного двигателя – коэффициентов мощности, полезного действия, перегрузочной способности – необходимо одновременно с частотой изменять и подводимое напряжение.
Закон изменения напряжения зависит от характера момента нагрузки Mс. При постоянном моменте нагрузки (Mс=const)напряжение на статоре должно регулироваться пропорционально частоте:
 .
.
Для вентиляторного характера момента нагрузки это состояние имеет вид:
 .
.
При моменте нагрузки, обратно пропорциональном скорости:
 .
.
Таким образом, для плавного бесступенчатого регулирования частоты вращения вала асинхронного электродвигателя, преобразователь частоты должен обеспечивать одновременное регулирование частоты и напряжения на статоре асинхронного двигателя.
2. Преимущества использования регулируемого электропривода в технологических процессах
Применение регулируемого электропривода обеспечивает энергосбережение и позволяет получать новые качества систем и объектов. Значительная экономия электроэнергии обеспечивается за счет регулирования какого-либо технологического параметра. Если это транспортер или конвейер, то можно регулировать скорость его движения. Если это насос или вентилятор – можно поддерживать давление или регулировать производительность. Если это станок, то можно плавно регулировать скорость подачи или главного движения.
Особый экономический эффект от использования преобразователей частоты дает применение частотного регулирования на объектах, обеспечивающих транспортировку жидкостей. До сих пор самым распространённым способом регулирования производительности таких объектов является использование задвижек или регулирующих клапанов, но сегодня доступным становится частотное регулирование асинхронного двигателя, приводящего в движение, например, рабочее колесо насосного агрегата или вентилятора.
Перспективность частотного регулирования наглядно видна из рисунка 1.
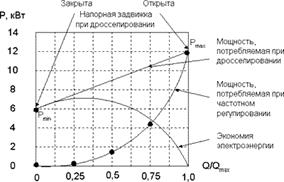
Рис. 1 – Зависимость экономии электроэнергии от потребляемой мощности.
Таким образом, при дросселировании поток вещества, сдерживаемый задвижкой или клапаном, не совершает полезной работы. Применение регулируемого электропривода насоса или вентилятора позволяет задать необходимое давление или расход, что обеспечит не только экономию электроэнергии, но и снизит потери транспортируемого вещества.
3. Структура частотного преобразователя
Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления. Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока. Силовой трехфазный импульсный инвертор состоит из шести транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя.
В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями.
Об л а с т и применения преобразователей частоты