Задание
1. Выполнить анализ систем уравнений, описывающих движение неуправляемого ЛА на активном участке траектории (АУТ): с помощью обучающей программы провести расчет траекторий неуправляемого ЛА в воздухе для заданных начальных значений скорости V0, угла бросания q0, координат начальной точки х0, у0. Результаты расчетов вывести в виде таблицы в функции времени с шагом печати hn = 0,1 с. Оценить влияние изменения начального угла бросания q0i, (i=1,2,3) путем расчета трех траекторий с углами бросания, лежащими в диапазонах q01 Î[ 10 град, 20 град], q02 Î[ 35 град, 45 град], и q03 Î[ 60 град, 80 град];
2. Выполнить анализ систем уравнений, описывающих движение неуправляемого ЛА на пассивном участке траектории (ПУТ) с учётом данных, полученных при расчете активных участков по п. 1, а именно - с помощью обучающей программы провести расчет пассивных участков траекторий, используя в качестве начальных условий точки старта элементы конца активного участка, полученные при выполнении пункта 1. Расчеты провести с шагом интегрирования hn = 0,1 с. Выдачу результатов расчёта ПУТ в таблицу оформить с шагом hв= 1,0 с;
3. Для заданных начальных условий стрельбы: V0Î[ 200м/с, 1000 м/с ], у0 = х0 = 0 найти угол максимальной дальности q0max(x) на ПУТ; интервал неопределённости угла бросания соответствует точности определения дальности бросания, равной 0,5 м. Расчеты провести с шагом интегрирования hn = 0,1 с. Выдачу результатов расчёта ПУТ в таблицу оформить с шагом hв= 1,0 с;
4. Для заданных начальных условий стрельбы: V0Î[ 200м/с, 1000 м/с ], у0 = х0 = 0 найти угол бросания, обеспечивающий дальность хк = 3000 м; интервал неопределённости угла бросания соответствует точности определения дальности бросания, равной 0,1 м. Расчеты провести с шагом интегрирования hn = 0,1 с. Выдачу результатов расчёта ПУТ в таблицу оформить с шагом hв= 1,0 с;
5. Построить графики и объяснить характер полученных зависимостей.
Математическая постановка задачи
1. Рассматривается плоское движение неуправляемого ЛА на активном участке под действием тяги Р, силы лобового сопротивления Ха, силы притяжения mg.
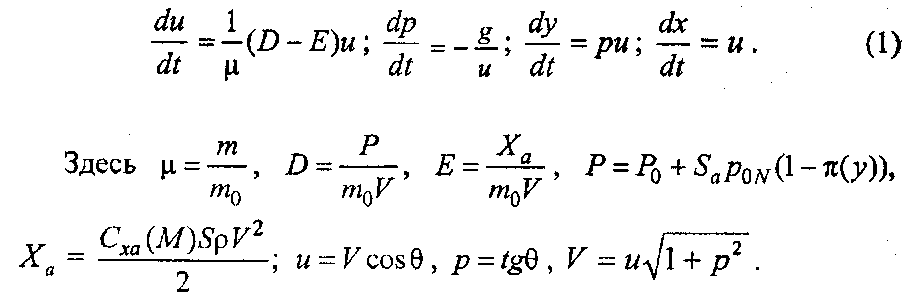 Для описания плоского движения центра масс ЛА используется следующая система уравнений
Для описания плоского движения центра масс ЛА используется следующая система уравнений
Для интегрирования системы уравнений (1) необходимо задать начальные условия: для t = 0, и = и0, р = р0, у = у0 и х = х0. В данном случае в качестве исходных данных вводятся значения начальной скорости V0 и начального угла бросания q0. Величины u 0 и р0 вычисляются автоматически с помощью соотношений для и u p, приведенных выше.
В работе рассчитываются элементы траектории гипотетического ЛА с заданными конструктивно-баллистическими характеристиками. Время активного участка составляет 3,4 с. Исходная система уравнений интегрируется методом Рунге-Кутта с постоянным шагом.
2. Рассматривается плоское движение неуправляемого ЛА на пассивном участке под действием силы лобового сопротивления Xа и силы притяжения mg.
Для описания движения центра масс ЛА используется система уравнений, полученная при проектировании действующих сил на оси нормальной земной системы координат OXg и OYg:
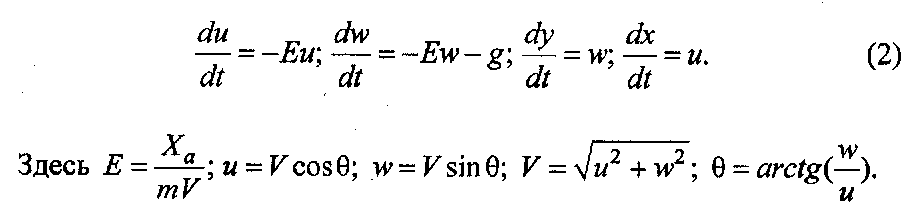
Проводится расчет элементов сложной траектории, имеющей активный и пассивный участки. В качестве начальных условий пассивного участка используют начальные условия в точке конца активного участка - значения начальной скорости V0пас =Vкакт, начального угла бросания q 0пас = qк акт, у0пас = уkакт, х0пас = хkакт, t0пас = tkакт. Величины u 0паси w0пасвычисляются автоматически с помощью соотношений для и и w, приведенных выше. Элементы траектории в точке падения вычисляются автоматически обратной интерполяцией.
Исходные данные
Вариант 7.
 ;
;
 ;
;
 ;
;
 ;
;
 .
.