Аэродинамика самолета Боинг-737 (300 – 900)
Боинг 737 — самый популярный в мире узкофюзеляжный реактивный пассажирский самолёт. Он является самым массово производимым реактивным пассажирским самолётом за всю историю пассажирского авиастроения. Несмотря на это, фирма Боинг не опубликовала общедоступного документа, отражающего аэродинамические особенности своего детища. В статье предпринимается попытка осветить данный вопрос по аналогии, как это делалось на всех советских самолетах. Основной текст касается «классической» модификации (300-500), с дополнительной информацией по модификации NG (600-900).
Содержание
Особенности аэродинамической компоновки самолета Боинг-737
Система управления самолетом
Скорость полета
Расчёт центровки самолёта
Взлет самолета
Посадка самолета
Устойчивость и управляемость
Система автоматического управления
Полет самолета при несимметричной тяге
Отказобезопасность
Недостатки самолета
Особенности аэродинамической компоновки самолета Боинг-737
Геометрические характеристики крыла
“Classic”
Площадь крыла 1135 ft2 или 105.44м2.
Размах крыла 94’9’’ или 28.88 м (102’5’’ или 31.22 м с winglets)
Относительное удлинение крыла 9.16
Сужение крыла 0.24
Угол стреловидности 25 градусов
Средняя аэродинамическая хорда (САХ) 134,5 inches или 341,63 см
“NG” (Размах крыла 35.75 м с winglets)
Максимальное аэродинамическое качество самолета – 15.
Вертикальные законцовки крыла (winglets).

Законцовки представляют собой дополнительные профилированные поверхности, предназначенные для уменьшения концевого вихря крыла, благодаря чему уменьшается индуктивное сопротивление.
См. https://aviacom.ucoz.ru/Principleflight.doc стр.45
Законцовки могут устанавливаться по желанию заказчика и благодаря их установке улучшаются следующие качества самолета:
1. Взлетные характеристики. Особенно в аэропортах, где максимальный взлетный вес самолёта ограничен препятствиями и/или ограничениями по шумам, аэропортах с высокой температурой, большим превышением. Поскольку увеличение аэродинамического качества обеспечивает более крутой набор высоты после отрыва.
2. Продлевается жизнь двигателей и уменьшаются расходы на их обслуживание. Лучшие характеристики набора высоты позволяют уменьшать требуемый режим двигателей на взлете. Также улучшение аэродинамического качества уменьшает потребный режим двигателей в крейсерском полете (до 4%).
3. Экономия топлива. В крейсерском полете километровый расход топлива уменьшается на 6%. Соответственно на ту же дальность можно перевезти больше груза.
4. Самолет быстрее набирает крейсерский эшелон, где воздушное пространство менее загружено и есть возможность летать по спрямленным маршрутам.
Кроме очевидных достоинств законцовки имеют ряд недостатков:
1. Дополнительный вес 170-235 кг.
2. Усиливается чрезмерная поперечная устойчивость самолёта (см. раздел Устойчивость и управляемость), что приводит к дополнительным ограничениям бокового ветра на посадке.
3. За счет смещения центра масс крыла назад уменьшается критическая скорость флаттера крыла. (см. https://aviacom.ucoz.ru/Principleflight4.doc стр.17)
Это одна из возможных причин, приведших к необходимости ограничения угла выпуска интерцепторов-элеронов на V>320 узлов (Load Alleviation System).
4. Версия программного обеспечения FMC часто не учитывает изменения лётных характеристик после установки законцовок. Особенно эти несоответствия заметны в расчёте характеристик снижения.
Система управления самолетом
Управление самолетом делится на основное и вспомогательное.
Основное управление состоит из штурвала и педалей, механически соединенных с рулем высоты, рулем направления и элеронами.
К вспомогательному управлению относится механизация крыла и переставной стабилизатор.
Рулевые поверхности основного управления отклоняются гидроприводами, работу которых обеспечивают две независимые гидросистемы А и В. Любая из них обеспечивает нормальную работу основного управления. Рулевые приводы (гидроприводы) включены в проводку управления по необратимой схеме, т. е. аэродинамические нагрузки от рулевых поверхностей не передаются на органы управления. Усилия на штурвале и педалях создают загрузочные механизмы.
При отказе обоих гидросистем руль высоты и элероны отклоняются пилотами вручную, а руль направления отклоняется с помощью резервной гидросистемы (standby hydraulic system).
Поперечное управление
Поперечное управление осуществляется элеронами (ailerons) и интерцепторами-элеронами (flight spoilers). На «классике» 4 секции интерцепторов-элеронов (см. рисунок в разделе Механизация крыла).
На NG восемь секций интерцепторов-элеронов (см. рисунок ниже).



При наличии гидропитания на рулевых приводах элеронов поперечное управление работает следующим образом:
-перемещение штурвальных колес штурвалов (полное отклонение – ±107,5 градусов) по тросовой проводке передается на рулевые приводы элеронов и далее на элероны;
-кроме элеронов, рулевые приводы элеронов перемещают пружинную тягу (aileron spring cartridge), связанную с системой управления интерцепторами и таким образом приводят её в движение;
-движение пружинной тяги передается на устройство изменения передаточного коэффициента (spoiler ratio changer). Здесь управляющее воздействие уменьшается в зависимости от величины отклонения рукоятки управления интерцепторами (speed brake lever). Чем больше отклонены интерцепторы в режиме воздушных тормозов, тем меньше коэффициент передачи перемещения штурвалов по крену;
-далее перемещение передается на механизм управления интерцепторами (spoiler mixer), где оно суммируется с перемещением рукоятки управления интерцепторами. На крыле с поднятым элероном интерцепторы приподнимаются, а на другом крыле – приспускаются. Таким образом, одновременно выполняются функции воздушного тормоза и поперечного управления. Интерцепторы включаются в работу при повороте штурвального колеса более 10 градусов;
-также, вместе со всей системой, движется тросовая проводка от устройства изменения передаточного коэффициента до устройства зацепления (lost motion device) механизма связи штурвалов.
Устройство зацепления соединяет правый штурвал с тросовой проводкой управления интерцепторами при рассогласовании более 12 градусов (поворота штурвального колеса).
На штурвальном колесе нанесены деления (units), позволяющие контролировать величину отклонения. Каждый unit соответствует 6° отклонения штурвального колеса.
Конструкция рулевых приводов элеронов такова, что при отсутствии гидропитания они позволяют пилотам двигать тросовую проводку элеронов напрямую, используя корпус рулевого привода, как жесткую тягу. При этом в системе управления образуется зона нечувствительности (люфт) 3° по углу поворота колеса штурвала. При повороте колеса штурвала на угол более 12° придёт в движение тросовая проводка системы управления интерцепторами. Если при этом рулевые машины интерцепторов будут работать, то интерцепторы будут работать в помощь элеронам.
Эта же схема позволяет второму пилоту управлять самолётом по крену с помощью интерцепторов при заклинении штурвала командира или тросовой проводки элеронов. При этом ему необходимо приложить усилие порядка 80-120 фунтов (36-54 кг), чтобы преодолеть усилие предварительной затяжки пружины в механизме связи штурвалов (aileron transfer mechanism), отклонить штурвал более 12 градусов и тогда вступят в работу интерцепторы.
При заклинении правого штурвала или тросовой проводки интерцепторов командир имеет возможность управлять элеронами, преодолевая усилие пружины в механизме связи штурвалов.
В случае заклинения одного из элеронов на соответствующей качалке срезается срезная заклёпка. Оставшийся элерон продолжает отклоняться нормально.
Рулевой привод элеронов соединен тросовой проводкой с левой штурвальной колонкой через загрузочный механизм (aileron feel and centering unit). Данное устройство имитирует аэродинамическую нагрузку на элеронах, при работающем рулевом приводе, а также смещает положение нулевых усилий (механизм триммерного эффекта). Пользоваться механизмом триммерного эффекта элеронов можно только при отключенном автопилоте, поскольку автопилот управляет рулевым приводом напрямую, и будет пересиливать любые перемещения загрузочного механизма. Зато в момент отключения автопилота эти усилия сразу же передадутся на проводку управления, что приведет к неожидаемому кренению самолета. Для управления механизмом триммерного эффекта установлено два переключателя. Один из них определяет сторону смещения нейтрали, а второй включает питание электродвигателя. Триммирование произойдет только при нажатии на оба переключателя одновременно.
Для уменьшения усилий при ручном управлении (manual reversion) элероны имеют кинематические сервокомпенсаторы (tabs) и балансировочные панели (balance panel).
(см. https://aviacom.ucoz.ru/Principleflight3.doc стр.5)
Сервокомпенсаторы кинематически связаны с элеронами и отклоняются в противоположную отклонению элерона сторону. Это уменьшает шарнирный момент элерона и усилия на штурвале.

Балансировочные панели представляют собой панели соединяющие переднюю кромку элерона с задним лонжероном крыла с помощью шарнирных соединений. При отклонении элерона, например, вниз - на нижней поверхности крыла в зоне элерона возникает зона повышенного давления, а на верхней – разрежения. Этот перепад давления распространяется в зону между передней кромкой элерона и крылом и, воздействуя на балансировочную панель, уменьшает шарнирный момент элерона.

При отсутствии гидропитания механизм триммерного эффекта реального уменьшения усилий не обеспечивает. Триммировать усилия на рулевой колонке можно с помощью руля направления или, в крайнем случае, разнотягом двигателей.
Углы отклонения элеронов: вверх - 20°, вниз - 15°. Разница в углах отклонения вверх и вниз позволяет уменьшить вредный момент рыскания от элеронов
(см. https://aviacom.ucoz.ru/Principleflight3.doc стр.12).
На земле, при нейтральном колесе штурвала оба элерона отклонены вниз на 1°, задняя кромка элерона ниже поверхности крыла на 9 мм (зависание элеронов). В полёте, под действием зоны разряжения над крылом, проводка элеронов деформируется и элероны «всплывают» и становятся вровень с крылом, что уменьшает лобовое сопротивление.
Продольное управление
Управляющими поверхностями продольного управления являются: руль высоты, обеспеченный гидравлическим рулевым приводом, и стабилизатор, обеспеченный электрическим приводом. На задней кромке руля высоты установлен сервокомпесатор, предназначенный для облегчения отклонения руля пилотами при отказе гидропитания. Также руль высоты в концевой части имеет выступ («рог»), в котором размещается балансировочный груз. В весовом отношении руль высоты полностью сбалансирован.
На «классике» штурвальные колонки командира и второго пилота соединены между собой жестко. На “NG” при заклинении одной из штурвальных колонок вторая сохранит свою подвижность.
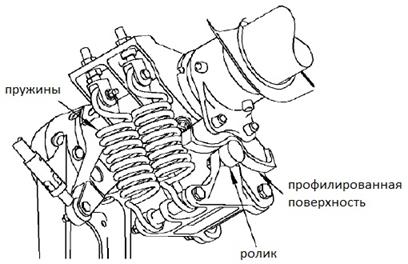
На рисунке изображён узел, позволяющий раздельное движение штурвалов по тангажу. На командирской стороне расположена профилированная поверхность, к которой пружинами прижимается ролик, связанный со штурвалом второго пилота. Для преодоления сопротивления пружин пилоту, на чьей стороне не заклинило проводку управления, понадобится приложить дополнительное усилие 31 фунт (14 кг). Для дальнейшего отклонения штурвала придётся преодолевать сопротивление заклинившей половины тросовой проводки. Это резко ограничит диапазон возможного отклонения штурвала и увеличит потребные усилия. Так отклонения руля высоты на 4° потребуется усилие 100 фунтов (45 кг). Хотя эти усилия больше, чем при пилотировании самолёта без гидроусилителей (manual reversion), но управляемость, достаточная для выполнения посадки, сохраняется. Усилия снимать отклонением стабилизатора.
Штурвалы пилотов связаны с гидравлическими приводами руля высоты с помощью тросовой проводки. Кроме пилотов на проводку управления рулём высоты воздействуют: рулевая машина автопилота (когда включена), раздвижная тяга электромеханизма Mach Trim System и при изменении положения стабилизатора происходит смещение нейтрали загружателя штурвала (feel and centering unit).
Нормальное управление стабилизатором осуществляется от переключателей на штурвалах или автопилотом. Резервное управление стабилизатором - механическое с помощью колеса управления на центральном пульте управления.
Управление рулем высоты
Две половины руля высоты механически соединены между собой с помощью трубы. Гидроприводы руля высоты питаются от гидросистем А и В. Подачей гидрожидкости к приводам управляют переключатели в кабине пилотов (Flight Control Switches).
Одной работающей гидросистемы достаточно для нормальной работы руля высоты.
В случае отказа обоих гидросистем (manual reversion) руль высоты отклоняется вручную от любого из штурвалов. Для уменьшения шарнирного момента руль высоты оснащен двумя аэродинамическими сервокомпенсаторами и шестью балансировочными панелями.
Наличие балансировочных панелей приводит к необходимости установки стабилизатора полностью на пикирование (0 units) перед обливом противообледенительной жидкостью. Такая установка предотвращает попадание слякоти и противообледенительной жидкости в воздушные полости балансировочных панелей, поскольку стабилизатор будет иметь положительный угол наклона 4° (передняя кромка выше задней).

На модификации “NG” аэродинамические сервокомпенсаторы при выпущенных закрылках и наличии давления в гидросистемах перестраиваются на антикомпенсаторы.
Принцип работы сервокомпенсатора и антикомпенсатора см. https://aviacom.ucoz.ru/Principleflight3.doc стр 5, 6




На левой половине руля высоты перестройка осуществляется по команде от FCC. Гидроцилиндр работает от гидросистемы А.
На правой половине – по сигналу датчика положения закрылков с задержкой на 10 секунд.
Гидроцилиндр работает от гидросистемы В.
На фото видно, что при руле высоты, отклонённом на пикирование, сервокомпенсатор на левой половине отклонён вверх (работает как сервокомпенсатор), а на правой половине – отклонён вниз (работает как антикомпенсатор). Это произошло потому, что была включена в работу только гидросистема В.
В AFM (Aircraft Flight Manual) 737-800 написано, что зафиксированы случаи вибрации сервокомпенсатора на приборной скорости более 275 узлов в диапазоне высот от 10000 до 25000 футов, при этом перед полётом производилась процедура удаления льда/противообледенения стабилизатора.
В связи с тем, что сервокомпенсатор может вызвать вибрацию проводки управления (См. Недостатки самолёта №6), то логично было бы выпустить закрылки, поскольку антикомпенсатор не способствует отклонению руля и, соответственно, не должен вызывать вибрацию. Хотя QRH в данном случае рекомендует только плавно уменьшить скорость до прекращения вибрации, не использовать интерцепторы в полёте и произвести посадку на ближайшем аэродроме.
Поскольку руль высоты не имеет аэродинамического триммера и в проводке управления нет механизма триммерного эффекта, то снять усилия с отклонённого штурвала невозможно. Чтобы усилия на штурвале исчезли, его нужно вернуть в нейтральное положение. При этом требуемого изменения в балансировке достигают путём перекладки стабилизатора. На всех установившихся режимах полёта независимо от высоты, скорости и тангажа штурвал всё время находится в приблизительно одном и том же нейтральном положении, которое может немного изменяться в зависимости от положения стабилизатора и работы системы MACH TRIM.
Нейтральное положение руля высоты относительно самолёта меняется в зависимости от положения стабилизатора. Руль высоты как бы «стремится» находиться в одной плоскости со стабилизатором. При работающем рулевом приводе руля высоты это обеспечивается за счёт смещения нейтрали загружателя штурвала, при включенном автопилоте – за счёт отслеживания положения стабилизатора датчиком автопилота и выдаче соответствующей команды на рулевой привод. При перекладке стабилизатора из положения 0 units в положение 17 units, штурвал смещается на 4,3 см на кабрирование, что соответствует перекладке руля высоты около 7°.
При положении стабилизатора 3 units, руль высоты опущен вниз на 4°.
При перекладке стабилизатора на кабрирование до 10 units, руль высоты займёт горизонтальное положение.
При угле стабилизатора 14 units, руль высоты поднимется вверх на 2,75°.
На самолетах модификации “NG” положение нейтрали руля высоты регулируется не только механически смещением нейтрали загружателя, но и электрическим сигналом от компьютера контролирующего управление самолётом FCC (flight control computer). Данный компьютер воздействует на проводку управления рулём высоты через электромеханизм системы MACH TRIM.

Функция смещения нейтрали от FCC работает только при отключенном автопилоте и выпущенных закрылках, когда пилот перекладывает стабилизатор нажатием переключателя на штурвале или меняет положение закрылков.
Положение стабилизатора то 7 до 10,5 units соответствует взлёту с передней центровкой. FCC при этом командует на смещение нейтрали руля высоты ~ 1,5° на пикирование. Стабилизатор в балансировочном положении (при нулевых усилиях на штурвале) при этом будет больше отклонён на кабрирование, что улучшает управляемость на взлёте (увеличивает запас руля высоты на кабрирование).
Поскольку гидравлические приводы руля высоты включены в проводку управления по необратимой схеме, то аэродинамическая нагрузка от рулей на штурвалы не передаётся. Усилия искусственно создаются с помощью загружателя штурвала (feel and centering unit) на который, воздействуют:
- механизм смещения нейтрали (точки нулевых усилий), механически связанный со стабилизатором;
- механизм системы Mach trim system;
- гидравлический имитатор аэродинамической нагрузки (elevator feel computer).

При отклонении штурвала поворачивается центрирующий кулачок, при этом подпружиненный ролик выходит из своей «ямки» на боковую поверхность кулачка. Стремясь под действием пружины вернуться обратно, он создает усилие в поводке управления, препятствующее отклонению штурвала. Кроме пружины на ролик воздействует исполнительный механизм имитатора аэродинамической нагрузки (elevator feel computer). Чем больше командное давление, тем сильнее ролик будет прижиматься к кулачку, что будет имитировать возрастание скоростного напора. Особенностью двухпоршневого цилиндра является то, что он воздействует на загружатель штурвала максимальным из двух командных давлений. Это легко понять по рисунку, поскольку между поршнями давления нет, и цилиндр будет находиться в нарисованном состоянии только при одинаковых командных давлениях. Если же одно из давлений станет больше, то цилиндр сместится в сторону большего давления, пока один из поршней не упрется в механическую преграду, исключив, таким образом, цилиндр с меньшим давлением из работы.

На вход elevator feel computer поступает скорость полета (от приемников воздушного давления, установленных на киле) и положение стабилизатора.
Под действием разности полного и статического давлений мембрана (q diaphragm) прогибается вниз, смещая золотник командного давления. Чем больше скорость, тем больше командное давление.
Изменение положения стабилизатора передается на кулачок стабилизатора, который через упругий рычаг ограничивает опускание мембраны и, соответственно, рост командного давления. Чем больше стабилизатор отклонен на кабрирование, тем меньше максимальное командное давление.
Предохранительный клапан предназначен для защиты от чрезмерного увеличения командного давления.
Таким образом гидравлическое давление из гидросистем А и В 3000 psi (210 атм.) преобразуется в соответствующее командное давление 200 – 2100 psi (от 14 до 150 атм.), воздействующее на загружатель штурвала. На NG диапазон командных давлений 180 -1400 psi.
Если, при убранных закрылках, разница в командных давлениях становится более 25%, то пилотам выдается сигнал FEEL DIFF PRESS. Эта ситуация возможна при отказе одной из гидросистем или одной из веток приемников воздушного давления. Никаких действий от экипажа не требуется, поскольку система продолжает нормально функционировать.
На самолётах модификации NG к каналу командного давления от гидросистемы А подключен модуль создания дополнительного давления EFSM (elevator feel shift module). Он выдаёт давление 850 psi когда включается в работу система предупреждения о приближении сваливания самолёта.
Система предупреждения о приближении сваливания самолёта
На штурвалах самолёта установлены механизмы тряски штурвала, которые обеспечивают тактильное и звуковое предупреждение пилотам о приближающемся сваливании.
Система состоит из двух независимых компьютеров с датчиками информации. Один компьютер выдаёт команду на включение механизма тряски штурвала командира, а второй – штурвала второго пилота.
Система включается, когда датчик AIR – GROUND на правой стойке покажет, что самолёт находится в воздухе, или скорость самолёта станет больше 160 узлов.
Система выключается, когда вышеупомянутый датчик покажет, что самолёт находится на земле, или же скорость самолёта уменьшится менее 60 узлов.
При расчёте момента включения механизма тряски используются четыре алгоритма:
- normal stall warning (сравнение α текущего и α включения механизма тряски)
- asymmetry stall warning (поправка на положение предкрылков)
- high thrust stall warning (поправка на тягу двигателей)
- speed floor stall warning (включение тряски независимо от угла атаки при падении скорости).
В первом алгоритме анализируется текущий угол отклонения закрылков (trailing edge flaps). Каждой позиции закрылков соответствует свой угол атаки включения тряски штурвала. Если текущий угол атаки превышает установленный предел, то выдаётся команда на включение тряски штурвала.
Второй и третий алгоритм включаются при выпущенных закрылках.
Второй алгоритм отслеживает загорание сигнализации LE FLAPS TRANSIT. Через 8 секунд после её появления (для исключения ложных срабатываний при выпуске-уборке предкрылков), выдаётся команда на первый алгоритм на понижение границы включения сигнализации. То есть компьютер считает, что сваливание начнётся на меньшем угле атаки и соответственно включит сигнализацию.
Третий алгоритм следит за режимом двигателей и скоростью полёта. Если N1>65%, N2>75%, то в зависимости текущих N1 и скорости полёта рассчитывается CTG (coefficient of thrust gradient) и, соответственно, выдаётся команда на первый алгоритм на понижение границы включения сигнализации. При этом команды от второго и третьего алгоритмов сравниваются и на выходе остаётся та, что больше по величине. Физический смысл третьего алгоритма – двигатели на повышенных режимах работы создают дестабилизирующий кабрирующий момент, способствующий попаданию самолёта в сваливание.
Четвёртый алгоритм анализирует только угол выпуска закрылков и текущую скорость полёта (таблица соответствия на рисунке). Когда скорость падает менее табличного значения, тряска штурвала включается независимо от угла атаки.
Информацию о текущем угле атаки система получает с датчиков угла атаки, расположенных справа и слева носовой части самолёта.

Также эти компьютеры рассчитывают и выдают на индикацию две скорости, обозначенные на линейке скоростей пилотажного индикатора. Большая из этих скоростей обозначается вершиной столбика янтарного цвета (цифра 8 на рисунке). Это минимальная скорость маневрирования (minimum maneuver speed). Она рассчитывается по текущему углу атаки и скорости самолёта. При полёте на данной скорости механизм тряски штурвала сработает при перегрузке 1.3 (см. уточняющий текст ниже). При изменении текущей нормальной перегрузки вершина янтарного столбика не перемещается по линейке скоростей.

Меньшая скорость обозначается вершиной красно-чёрного полосатого столбика и обозначает расчётную скорость начала срабатывания механизма тряски штурвала (цифра 9 на рисунке). В расчёте этой скорости участвует, в том числе, и текущая нормальная перегрузка (stick shaker speed), то есть при увеличении перегрузки красно-чёрный столбик ползёт вверх. Фактическое сваливание самолёта должно произойти на скорости меньшей, чем индицируемая скорость включения тряски штурвала.
Логика расчёта минимальной скорости маневрирования (вершина янтарного столбика) меняется в зависимости от положения закрылков.
При выпущенных закрылках (максимальная высота полёта 20000 футов) обеспечивается запас по перегрузке 0.3 до включения механизма тряски штурвала. Данный запас обеспечивает выполнение горизонтального разворота с креном 40° и обеспечивает «полные маневренные возможности самолёта» (full maneuver capability).
При убранных закрылках этот запас обеспечивается только на высотах ниже 10000 футов. В диапазоне высот 10000 - 20000 футов он уменьшается из-за влияния растущего числа М. Но не ниже 0.155, что соответствует горизонтальному развороту с креном 30° и обеспечивает «достаточные маневренные возможности самолёта» (adequate maneuver capability).
Выше 20000 футов вершина янтарного столбика показывает запас до начала аэродинамической тряски (low speed buffet), а не до начала тряски штурвала. Причем величину запаса можно установить предварительным программированием FMC в диапазоне 0.15 ÷ 0.65 для классики и 0.2 ÷ 0.6 для NG (по умолчанию Боинг устанавливает запас 0.3).
Чтобы узнать, какой запас установлен на конкретном самолёте нужно на земле открыть страницу INDEX зайти в MAINT открыть FMCS выбрать PERFORM FACTOR. Данный запас будет индицироваться в строке MANEUV FACTOR (он пишется с единицей, т.е. запас 0.3 обозначается 1.3)
На некоторых «классических» самолётах SMC (Stall Management Computer) дополнительно рассчитывает flaps up maneuvering speed (зелёный кружочек), minimum flap retraction speed (зелёная буква F), high speed buffet (дно верхнего янтарного столбика, цифра 15 на рисунке) и maximum operating speed (дно верхнего красно-чёрного столбика, цифра 14).

На самолетах модификации NG, кроме этого, рассчитывается рекомендуемая скорость для пилотирования при заходе на посадку и после взлёта (flap maneuvering speed, цифра 2 на рисунке). Данная скорость обозначается символом UP или цифрой, обозначающей угол выпуска закрылков. Эта скорость рассчитывается FMC по текущему весу самолёта и обеспечивает, как минимум, координированный разворот с креном 40 (то есть нормальную перегрузку 1.3) до срабатывания механизма тряски штурвала при полёте на небольшой высоте. При увеличении высоты данный запас может не обеспечиваться.

В нормальных условиях рекомендуемая скорость всегда будет больше минимальной скорости маневрирования, но при отказах механизации крыла может стать меньше.
Компьютер системы предупреждения о сваливании также рассчитывает угол тангажа, при достижении которого, будет достигнут угол атаки тряски штурвала (PLI pitch limit indicator). Данный символ индицируется на пилотажном приборе только при выпущенных закрылках.
Также данная система даёт команду в систему выпуска предкрылков на автоматический довыпуск выдвижных предкрылков при приближении к сваливанию (autoslat system). Команда выдаётся на угле атаки меньшем, чем угол атаки тряски штурвала. На классике данная система работает в диапазоне углов выпуска закрылков 1 – 5 градусов, а на NG – в диапазоне 1 – 25 градусов.
Кроме рассмотренных функций, на самолётах модификации NG предусмотрена активная помощь пилоту по выходу из сваливания. Когда компьютер системы предупреждения сваливания определяет, что самолёт находится на режиме сваливания (stall ID), то он выдаёт сигнал в систему управления самолётом (FCC), которая перекладывает стабилизатор на пикирование. Чтобы пилот не смог легко парировать данный пикирующий момент взятием штурвала на себя, включается модуль EFSM (Elevator Feel Shift Module), подающий дополнительное командное давление на загружатель штурвала. При этом градиент усилий на угол отклонения штурвала увеличивается почти в четыре раза. Условия срабатывания модуля EFSM: включился механизм тряски штурвала и после этого угол атаки увеличился ещё на 8 - 11°, а также нет запрещения для работы модуля из-за малой высоты полёта (100 футов).
Система улучшения устойчивости по скорости на больших числах М
(Mach Trim System)
Данная система является встроенной функцией цифровой системы управления самолетом (DFCS).
Система MACH TRIM обеспечивает устойчивость по скорости при числе М более 0,615. При увеличении числа М электромеханизм MACH TRIM ACTUATOR смещает нейтраль загружателя штурвала (feel and centering unit) и руль высоты автоматически отклоняется на кабрирование, компенсируя пикирующий момент от смещения аэродинамического фокуса вперед. При этом на штурвал никакие перемещения не передаются. Подключение и отключение системы происходит автоматически в функции числа М.
Система получает число М от Air Data Computer. Система двухканальная. При отказе одного канала индицируется MACH TRIM FAIL при нажатии Master Caution и гаснет после Reset. При двойном отказе система не работает и сигнал не гасится. На классике необходимо выдерживать число М не более 0.74, на NG – IAS не более 280 узлов, число М не более 0.82.