ЛАБОРАТОРНАЯ РАБОТА №2
Исследование принципов функционирования и частотных преобразователей, применяемых для управления асинхронными двигателями
Введение
Лабораторная работа предназначена для изучения функционирования и конструктивных особенностей электроприводов постоянного тока, применяемых в системах управления технологического оборудования.
Указания по организации самостоятельной работы
3.1.1. Перед работой необходимо ознакомиться с устройством и принципом функционирования асинхронных двигателей. При подготовке к лабораторной работе необходимо дополнительно руководствоваться учебными пособиями по курсам «Аналоговая и цифровая схемотехника».
3.1.2. Частотно-регулируемый асинхронный электропривод. Трехфазный асинхронный электродвигатель (АД) с коротко-замкнутым ротором – самый массовый тип электрической машины, прекрасно отработанный технологически за более чем столетний период развития. Частота вращения поля n0 в двигателе определяется частотой напряжения питающей сети f1:
где р - число пар полюсов.
Отличие частоты вращения ротора n от n0 определяется скольжением s:
которое в нормальных двигателях не превышает 0,02...0,04, т.е.

Из выражения (3.12) следует, что единственным рациональным способом плавно регулировать скорость такого двигателя является изменение частоты приложенного к его обмоткам напряжения (рис. 3.2). Другие способы – изменение числа пар полюсов или амплитуды напряжения – предполагают либо использование специального более тяжелого и дорогого двигателя, либо связаны с существенным ухудшением энергетических характеристик.
При изменении частоты вниз от номинальной необходимо изменять и амплитуду напряжения.
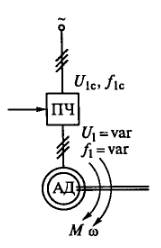
Рис. 3.2. Структура частотно-регулируемого электропривода
Поскольку ЭДС, наводимая в обмотках статора, согласно формуле (1.13) примерно равна (если пренебречь падением напряжения на обмотках) приложенному напряжению:

то для сохранения при изменении частоты номинального магнитного потока и, следовательно, максимального (критического) момента необходимо выполнить условие:
Несоблюдение этого условия, т.е. изменение частоты вниз при номинальном напряжении, недопустимо, так как вызовет рост магнитного потока и в соответствии с кривой намагничивания резкий рост намагничивающего тока Iμ.

Рис. 3.3. Механические характеристики частотно-регулируемого электропривода

Рис. 3.4. Зависимость напряжения от частоты при частотном регулировании
Изменение частоты вверх от номинальной при номинальном напряжении возможно, это будет приводить к снижению критического момента. Механические характеристики асинхронного двигателя при частотном регулировании имеют вид, показанный на рис. 3.3. Для того чтобы компенсировать падение напряжения в обмотках статора и сохранить неизменный Мк при низких частотах, несколько увеличивают напряжение, как показано на рис. 3.4.
Длительно допустимый момент двигателя при частотном регулировании показан на рис. 3.3 штриховой линией. Допустимый момент несколько снижается при низких скоростях в связи с ухудшением вентиляции и уменьшается обратно пропорционально скорости при высоких скоростях из-за уменьшения магнитного потока. Важное свойство частотного регулирования – практическое постоянство потерь при изменении скорости и одинаковой нагрузке. Покажем это, оценив потери при критическом скольжении. В соответствии с формулой (1.34)
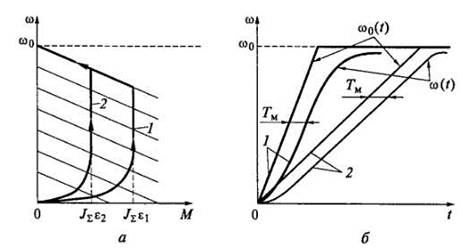
Рис. 3.5. Графики частотного пуска асинхронного электродвигателя в координатах ω - М (а) и ω - t (б)
Заменив ω0 и sk их выражениями, соответственно будем иметь

Еще одно очень полезное свойство частотного регулирования – управление динамическими режимами с нужной мерой сокращения потерь энергии при пусках и торможениях.
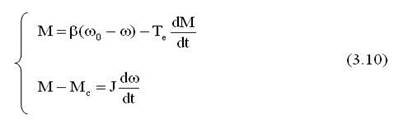
При частотном регулировании можно задавать любой темп изменения скорости поля ω0(t). На рис, 3.5 в качестве примера показаны два варианта пуска: ускоренный (1) и замедленный (2). Скорость ротора ω(t) отстает от скорости поля ω0(t) на величину электромеханической постоянной времени Tм:

определяемой по рабочему участку механической характеристики двигателя.
Момент, развиваемый двигателем на основном участке переходного процесса, пропорционален ускорению:

Как было показано в первой лабораторной работе, потери энергии при прямом пуске и прямом торможении вхолостую определяются в соответствии с выражением (1.40):
Здесь учитываются только переменные потери, значительно превышающие в динамических режимах постоянную составляющую.
Потери энергии при пуске - площадь фигуры, заключенной между кривыми электромагнитной мощности Pэм = Mω0 и мошности на валу Р2 = Mω (рис. 3.6). При прямом пуске (торможении) электромагнитная мощность возникает практически мгновенно, а мощность на валу, пропорциональная скорости, нарастает в неуправляемом темпе переходного процесса (см. рис. 1.12). Потери энергии определяются площадью треугольника на рис. 3.6 а.
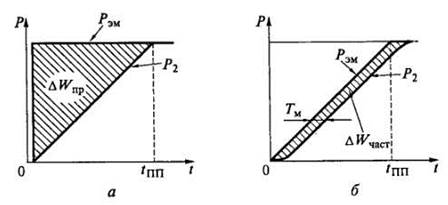
Рис. 3.6. Потери энергии при прямом (а) и частотном (б) пуске
Потери энергии при частотном пуске (торможении) - заштрихованная область на рис. 3.6, б - будут зависеть от управляемого времени переходного процесса tпп:

и могут быть сделаны сколь угодно малыми при увеличении tпп. Итак, частотно-регулируемый асинхронный электропривод в его простейшей реализации (рис. 3.2) позволяет регулировать скорость вниз и вверх от основной, соответствующей частоте 50 Гц, при минимальных возможных потерях, управлять временем переходных процессов и снижать до желаемого уровня потери энергии, сопровождающие переходный процесс.