РЕФЕРАТ
по дисциплине «Системы оптимального управления энергоустановками АЭС»
Тема: «Оптимальные системы автоматизированного управления
исполнительным механизмом»
Выполнил
студент гр. В51901/11: Батанин А.О.
(подпись)
Проверил
проф.: Серов А.Е.
(подпись)
Сосновый Бор
2016
Содержание.
Ведение ……………………………………………………………………………………………3
1 Показатели эффективности управления. Функционал...……………..7
2 Форма простых множителей ВМУ…………………………………………….…..9
Заключение……………………………………………………………………………………..10
ВВЕДЕНИЕ
Управление – это процесс воздействия на объект управления с целью обеспечения требуемого качества протекания процессов в нём или требуемого состояния.
Объект управления – обобщающий термин кибернетики и теории автоматического управления, обозначающий устройство или динамический процесс, управление поведением которого является целью создания системы автоматического управления. Объекты управления в технических системах состоят из двух функциональных частей – сенсорной и исполнительной.
Устройство управления – техническое средство, осуществляющее в соответствии с заданным алгоритмом управления воздействие на объект управления.
Система управления – совокупность взаимодействующих между собой объектов управления и устройств управления. Системы управления бывают следующих основных видов:
· САУ – не требуется вмешательство в процесс управления человека;
· АСУ –предполагается обязательное участие человека в процессах управления;
· система ручного управления – человек выполняет все функции управления.
Задачи управления в технических системах разделяются на:
· анализ системы (рисунок 2):
- задана структура системы;
- заданы входные сигналы;
- заданы выходные сигналы;
- необходимо определить реакцию системы, т.е определить Xвых;
Рисунок 2 – Задача анализа
· синтез системы (рисунок 3):
- заданы сигналы управления;
- заданы сигналы возмущения;
- задана реакция системы Xвых по техническим условиям на систему;
- необходимо выполнить выбор структуры – такой, чтобы получить необходимую реакцию системы Xвых.
Рисунок 3 – Задача синтеза
· оптимизация системы (рисунок 4):
- задана структура системы;
- задаются различные сигналы возмущения;
- задана реакция системы Xвых по техническим условиям на систему;
- необходимо найти такой характер управления (оптимальное управление), который бы соответствовал заданным параметрам.
Рисунок 4 – Задача оптимизации
Оптимизация – это процедура поиска, в некотором смысле, наилучшего решения поставленной задачи. Для характеристики качества выбираемого решения в технических системах, вводится скалярная величина – критерий качества J (критерий оптимальности).
Если искомой функцией является управление (или регулирующее воздействие) u(t), то такая оптимизационная задача называется задачей об оптимальном управлении. Решение u’(t) в виде функции времени представляет собой оптимальное управление в разомкнутой системе, которое должно осуществляться в объекте на некотором интервале Т в будущем. Такое решение может быть использовано, например, в дискретной системе автоматического регулирования в пределах шага дискретизации Δt = Т, в системах программного регулирования или в качестве алгоритма командного блока сложных АСР.
Если управление u удалось выразить в виде функции вектора переменных состояния объекта управления u’(X), путём исключения из решения переменной времени t, то решена задача синтеза оптимального алгоритма управления (регулирования) – задача синтеза. Решение u’(X) соответствует непрерывной замкнутой системе управления, например, системе стабилизации или следящего регулирования.
Методы, используемые для поиска оптимального управления (оптимальных алгоритмов управления), существенно отличаются от классических методов ТАР и часто определяются как методы теории оптимального управления, осуществляющие решение во временной области. Основные методы решения задач оптимизации:
· метод вариационного исчисления;
· метод максимума;
· метод динамического программирования.
Основы теории оптимального управления ведут свое начало от работы Иоганна Бернулли о брахистохроне (линии наискорейшего спуска) 1696 года и фундаментальных работ Эйлера и Лагранжа в области вариационного исчисления, выполненных еще в XVIII веке. Методы Эйлера-Лагранжа математической теории вариационного исчисления посвящены определению экстремума функционалов, и как любые классические методы накладывают существенные ограничения на область допустимых решений.
Новые задачи, возникшие в середине XX века, и особенно задачи автоматического управления, обусловили появление новых методов решения. Наиболее важными из них являются метод, основанный на принципе максимума Л.С. Понтрягина и метод динамического программирования Р. Беллмана.
1. Показатели эффективности управления.Функционал
Обязательной составной частью математической модели объекта оптимизации является числовой критерий, минимальному или максимальному значению которого (в зависимости от конкретной задачи) соответствует наилучший вариант поведения исследуемого объекта. Величина этого критерия полностью определяется выбранными значениях управляемых переменных, т.е. он является функцией этих переменных и называется целевой функцией.
В инженерной практике используется широкий спектр критериев оптипизации. Например, это могут быть критерии экономического характера, такие, как себестоимость, прибыль, капитальные затраты и т.д., технические или физические параметры системы - продолжительность технологического процесса, потребляемая энергия, максимальная механическая нагрузка, достигнутая скорость движения и другие.
 , где
, где
J-критерий оптимальности
J1= 
J1 -определяет критерий в статическом режиме, статическая оптимизация
J2= 
J2 -определяется критерий в динамическом режиме, динамическая оптимизация;
Для определения критерия оптимальности мы используем функцию особого рода, у которой в роли независимой переменной выступает обычная функция, называющаяся Функционалом
Следует отметить, что во многих случаях выбор критерия оптимизации не является очевидным и однозначным. Часто бывает трудно поставить в соответствие всей совокупности целей функционирования системы какой-либо один критерий. Это объясняется различными причинами, такими, как сложность целевой функции, описывающей большую совокупность разнородных целей, неопределенность формулировок некоторых целей, препятствующая описанию их с помощью количественных характеристик, наличие противоречивых целей, важность каждой из которых зависит от точки зрения и т.д. Например, невозможно найти решение, обеспечивающее одновременно минимальные затраты, максимальную надежность, минимальное энергопотребление и максимальное быстродействие.
Выход из этого положения определяется в каждом конкретном случае. Например, из многих критериев, характеризующих различные цели оптимизации, выбирают один, считая его основным, а остальные. — второстепенным. Далее второстепенные критерии либо не учитываются, либо учитываются частично с помощью дополнительных ограничений на управляемые переменнпые. Эти ограничения обеспечивают изменение второстепенных критериев в заданных диапазонах приемлемых значений.
Другой путь состоит в формулировке комплексного критерия, т.е. целевой функции, включающей с разумно выбранными весовыми коэффициентами целевые функции, соответствующие различным целям
Форма простых множителей ВМУ.
Если передаточная функция разложима на простые множители, то ее можно представить в виде произведения:

Блок-схема разложения из последовательного соединения элементарных динамических систем представлена на рис. 1.4.
Принимая в качестве переменных состояния выходы блоков простых множителей, можно записать:

Из системы уравнений получаем составляющие векторно-матричного уравнения:
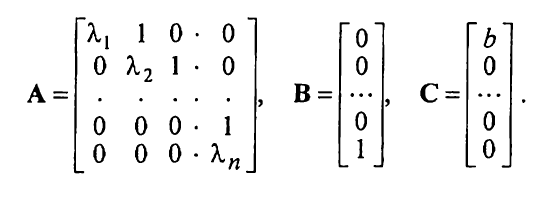

Рисунок 1.4. Блок схема формы простых множителей
В главной диагонали матрицы А располагаются корни характеристического уравнения, а диагональ над ней состоит из единиц. При изменении последовательности индексов переменных состояния на обратную единичная диагональ будет располагаться под главной диагональю.
Такая форма представления применима как для простых, так и для кратных корней.
ЗАКЛЮЧЕНИЕ
В настоящее время теория оптимальных систем автоматическою управления представляет собой вполне сформировавшуюся часть общей теории управления. Она охватывает большой круг вопросов, связанных с определением оптимального в том или ином смысле управления для детерминированных и стохастических систем. При этом оптимальное управление может определяться как функция времени (оптимальная программа), так и как функция координат состояния системы (оптимальный регулятор). Определенные задачи возникают при технической реализации оптимального управления, в особенности в замкнутой автоматической системе. Здесь следует отметить автоколебательные и скользящие режимы, которые могут иметь место в системе, когда поверхность переключения реализуется с некоторыми погрешностями и характеристика релейного элемента отлична от идеальной. Важной прикладной задачей является техническая реализация оптимального регулирования. Задание различного рода ограничении на координаты состояния системы приводит к существенному усложнению необходимых условий оптимальности