

Максимальные значения скорости и ускорения
Проанализировав уравнения зависимости v(t) и a(t), можно догадаться, что максимальные значения скорость и ускорение принимают в том случае, когда тригонометрический множитель равен 1 или -1. Определяются по формуле


Как получить зависимости v(t) и a(t)
7. Свободные колебания. Скорость, ускорение и энергия колебательного движения. Сложение колебаний
Свободные колебания (или собственные колебания) — это колебания колебательной системы, совершаемые только благодаря первоначально сообщенной энергии (потенциальной или кинетической) при отсутствии внешних воздействий.
Потенциальная или кинетическая энергия может быть сообщена, например, в механических системах через начальное смещение или начальную скорость.
Свободно колеблющиеся тела всегда взаимодействуют с другими телами и вместе с ними образуют систему тел, которая называется колебательной системой.
Например, пружина, шарик и вертикальная стойка, к которой прикреплен верхний конец пружины (см. рис. ниже), входят в колебательную систему. Здесь шарик свободно скользит по струне (силы трения пренебрежимо малы). Если отвести шарик вправо и предоставить его самому себе, он будет совершать свободные колебания около положения равновесия (точки О) вследствие действия силы упругости пружины, направленной к положению равновесия.

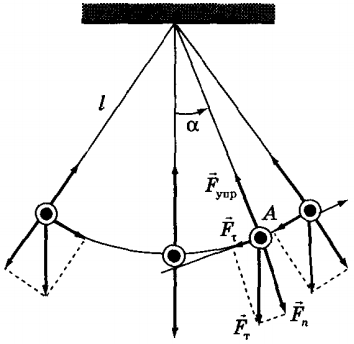
Другим классическим примером механической колебательной системы является математический маятник (см. рис. ниже). В данном случае шарик совершает свободные колебания под действием двух сил: силы тяжести и силы упругости нити (в колебательную систему входит также Земля). Их равнодействующая направлена к положению равновесия.
Силы, действующие между телами колебательной системы, называются внутренними силами. Внешними силами называются силы, действующие на систему со стороны тел, не входящих в нее. С этой точки зрения свободные колебания можно определить как колебания в системе под действием внутренних сил после того, как система выведена из положения равновесия.
Условиями возникновения свободных колебаний являются:
1) возникновение в них силы, возвращающей систему в положение устойчивого равновесия, после того как ее вывели из этого состояния;
2) отсутствие трения в системе.
Динамика свободных колебаний.
Колебания тела под действием сил упругости. Уравнение колебательного движения тела под действием силы упругости F (см. рис.) может быть получено с учетом второго закона Ньютона (F = mа) и закона Гука (Fупр= -kx), где m — масса шарика, а — ускорение, приобретаемое шариком под действием силы упругости, k — коэффициент жесткости пружины, х — смещение тела от положения равновесия (оба уравнения записаны в проекции на горизонтальную ось Ох). Приравнивая правые части этих уравнений и учитывая, что ускорение а — это вторая производная от координаты х (смещения), получим:
 .
.
Это дифференциальное уравнение движения тела, колеблющегося под действием силы упругости: вторая производная координаты по времени (ускорение тела) прямо пропорциональна его координате, взятой с противоположным знаком.
Колебания математического маятника. Для получения уравнения колебания математического маятника (рисунок) необходимо разложить силу тяжести FT= mg на нормальную Fn (направленную вдоль нити) и тангенциальную Fτ (касательную к траектории движения шарика — окружности) составляющие. Нормальная составляющая силы тяжести Fn и сила упругости нити Fynp в сумме сообщают маятнику центростремительное ускорение, не влияющее на величину скорости, а лишь меняющее ее направление, а тангенциальная составляющая Fτ является той силой, которая возвращает шарик в положение равновесия и заставляет его совершать колебательные движения. Используя, как и в предыдущем случае, закон Ньютона для тангенциального ускорения maτ= Fτ и учитывая, что Fτ= -mg sinα, получим:
aτ= -g sinα,
Знак минус появился потому, что сила и угол отклонения от положения равновесия α имеют противоположные знаки. Для малых углов отклонения sin α ≈ α. В свою очередь, α = s/l, где s — дуга OA, I — длина нити. Учитывая, что аτ= s", окончательно получим:
 .
.
Вид уравнения аналогичен уравнению . Только здесь параметрами системы являются длина нити и ускорение свободного падения, а не жесткость пружины и масса шарика; роль координаты играет длина дуги (т. е. пройденный путь, как и в первом случае).
Таким образом, свободные колебания описываются уравнениями одного вида (подчиняются одним и тем же законам) независимо от физической природы сил, вызывающих эти колебания.
Решением уравнений и является функция вида:
x = xmcos ω0t (или x = xmsin ω0t).
То есть координата тела, совершающего свободные колебания, меняется с течением времени по закону косинуса или синуса, и, следовательно, эти колебания являются гармоническими:

В уравнении x = xmcos ω0t (или x = xmsin ω0t), хm — амплитуда колебания, ω0 — собственная циклическая (круговая) частота колебаний.
Циклическая частота и период свободных гармонических колебаний определяются свойствами системы. Так, для колебаний тела, прикрепленного к пружине, справедливы соотношения:
 .
.
Собственная частота тем больше, чем больше жесткость пружины или меньше масса груза, что вполне подтверждается опытом.
Для математического маятника выполняются равенства:
 .
.
Эта формула была впервые получена и проверена на опыте голландским ученым Гюйгенсом (современником Ньютона).
Период колебаний возрастает с увеличением длины маятника и не зависит от его массы.
Следует особо обратить внимание на то, что гармонические колебания являются строго периодическими (т. к. подчиняются закону синуса или косинуса) и даже для математического маятника, являющегося идеализацией реального (физического) маятника, возможны только при малых углах колебания. Если углы отклонения велики, смещение груза не будет пропорционально углу отклонения (синусу угла) и ускорение не будет пропорционально смещению.
Скорость и ускорение тела, совершающего свободные колебания, также будут совершать гармонические колебания. Беря производную по времени функции (x = xmcos ω0t (или x = xmsin ω0t)), получим выражение для скорости:
v = -vmsin ω0t = -vmxmcos (ω0t + π/2),
где vm= ω0xm — амплитуда скорости.
Аналогично выражение для ускорения а получим, дифференцируя (v = -vmsin ω0t = -vmxmcos (ω0t + π/2)):
a = -amcos ω0t,
где am= ω20xm — амплитуда ускорения. Таким образом, амплитуда скорости гармонических колебаний пропорциональна частоте, а амплитуда ускорения — квадрату частоты колебания.
| ГАРМОНИЧЕСКИЕ КОЛЕБАНИЯ | ||
| Колебания, при которых изменения физических величин происходят по закону косинуса или синуса (гармоническому закону), наз. гармоническими колебаниями. Например, в случае механических гармонических колебаний:. В этих формулах ω – частота колебания, xm – амплитуда колебания, φ0 и φ0’ – начальные фазы колебания. Приведенные формулы отличаются определением начальной фазы и при φ0’ = φ0 +π/2 полностью совпадают. | 

| |
| Это простейший вид периодических колебаний. Конкретный вид функции (синус или косинус) зависит от способа выведения системы из положения равновесия. Если выведение происходит толчком (сообщается кинетическая энергия), то при t=0 смещение х=0, следовательно, удобнее пользоваться функцией sin, положив φ0’=0; при отклонении от положения равновесия (сообщается потенциальная энергия) при t=0 смещение х=хm, следовательно, удобнее пользоваться функцией cos и φ0=0. | ||
Выражение, стоящее под знаком cos или sin, наз. фазой колебания:  .
Фаза колебания измеряется в радианах и определяет значение смещения (колеблющейся величины) в данный момент времени. .
Фаза колебания измеряется в радианах и определяет значение смещения (колеблющейся величины) в данный момент времени.
|
| |
| Амплитуда колебания зависит только от начального отклонения (начальной энергии, сообщенной колебательной системе). | ||
| Скорость и ускорение при гармонических колебаниях. | ||
Согласно определению скорости, скорость – это производная от координаты по времени 
| ||
| Таким образом, мы видим, что скорость при гармоническом колебательном движении также изменяется по гармоническому закону, но колебания скорости опережают колебания смещения по фазе на π/2. | ||
Величина  - максимальная скорость колебательного движения (амплитуда колебаний скорости). - максимальная скорость колебательного движения (амплитуда колебаний скорости).
| 
| |
Следовательно, для скорости при гармоническом колебании имеем:  , а для случая нулевой начальной фазы , а для случая нулевой начальной фазы  (см. график). (см. график).
| 
| |
Согласно определению ускорения, ускорение – это производная от скорости по времени:
 - вторая производная от координаты по времени. Тогда: - вторая производная от координаты по времени. Тогда:  .
Ускорение при гармоническом колебательном движении также изменяется по гармоническому закону, но колебания ускорения опережают колебания скорости на π/2 и колебания смещения на π (говорят, что колебания происходят в противофазе). .
Ускорение при гармоническом колебательном движении также изменяется по гармоническому закону, но колебания ускорения опережают колебания скорости на π/2 и колебания смещения на π (говорят, что колебания происходят в противофазе).
| ||
Величина  - максимальное ускорение (амплитуда колебаний ускорения). Следовательно, для ускорения имеем:
- максимальное ускорение (амплитуда колебаний ускорения). Следовательно, для ускорения имеем:  , а для случая нулевой начальной фазы: , а для случая нулевой начальной фазы:  (см. график). (см. график).
|
| |
| Из анализа процесса колебательного движения, графиков и соответствующих математических выражений видно, что при прохождении колеблющимся телом положения равновесия (смещение равно нулю) ускорение равно нулю, а скорость тела максимальна (тело проходит положение равновесия по инерции), а при достижении амплитудного значения смещения – скорость равна нулю, а ускорение максимально по модулю (тело меняет направление своего движения). | ||
Сравним выражения для смещения и ускорения при гармонических колебаниях:
 и и  . .
| ||
Можно записать:  -
т.е. вторая производная смещения прямо пропорциональна (с противоположным знаком) смещению. Такое уравнение наз. уравнением гармонического колебания. Эта зависимость выполняется для любого гармонического колебания, независимо от его природы. Поскольку мы нигде не использовали параметров конкретной колебательной системы, то от них может зависеть только циклическая частота. -
т.е. вторая производная смещения прямо пропорциональна (с противоположным знаком) смещению. Такое уравнение наз. уравнением гармонического колебания. Эта зависимость выполняется для любого гармонического колебания, независимо от его природы. Поскольку мы нигде не использовали параметров конкретной колебательной системы, то от них может зависеть только циклическая частота.
|
| |
Часто бывает удобно записывать уравнения для колебаний в виде:  ,
где T– период колебания. Тогда, если время выражать в долях периода подсчеты будут упрощаться. Например, если надо найти смещение через 1/8 периода, получим: ,
где T– период колебания. Тогда, если время выражать в долях периода подсчеты будут упрощаться. Например, если надо найти смещение через 1/8 периода, получим:  . Аналогично для скорости и ускорения. . Аналогично для скорости и ускорения.
|
| |

Неpедки случаи, когда система одновpеменно участвует в двух или нескольких независимых дpуг от дpуга колебаниях. В этих случаях обpазуется сложное колебательное движение, котоpое создается путем наложения (сложения) колебаний дpуг на дpуга. Очевидно, случаи сложения колебаний могут быть весьма pазнообpазны. Они зависят не только от числа складываемых колебаний, но и от паpаметpов колебаний, от их частот, фаз, амплитуд, напpавлений. Не пpедставляется возможным обозpеть все возможное pазнообpазие случаев сложения колебаний, поэтому огpаничимся pассмотpением лишь отдельных пpимеpов.
1. Сложение колебаний одного напpавления. Сложим два колебания одинаковой частоты, но pазличных фаз и амплитуд.

(4.40)
Пpи наложении колебаний дpуг на дpуга

Введем новые паpаметpы А и j согласно уpавнениям:

(4.42)
Система уpавнений (4.42) легко pешается.

(4.43)

(4.44)
Таким обpазом, для х окончательно получаем уpавнение

(4.45)
Итак, в pезультате сложения однонапpавленных колебаний одинаковой частоты получаем гаpмоническое (синусоидальное) колебание, амплитуда и фаза котоpого опpеделяется фоpмулами (4.43) и (4.44).
Рассмотpим частные случаи, пpи котоpых соотношения между фазами двух складываемых колебаний pазличны:

(4.46)
Сложим тепеpь однонапpавленные колебания одинаковой амплитуды, одинаковых фаз, но pазной частоты.

(4.47)
Рассмотpим случай, когда частоты близки дpуг к дpугу, т. е.w1~w2=w
Тогда пpиближенно будем считать, что (w1+w2)/2= w, а (w2-w1)/2 величина малая. Уpавнение pезультиpующего колебания будет иметь вид:

(4.48)
Его гpафик изобpажен на pис. 4.5 Такое колебание называется биением. Оно осуществляется с частотой w но его амплитуда совеpшает колебание с большим пеpиодом.

2. Сложение двух взаимно пеpпендикуляpных колебаний. Допустим, что одно колебание осуществляется вдоль оси х, дpугое - вдоль оси y. Результиpующее движение, очевидно, pасполагается в плоскости xy.
1. Допустим, что частоты колебаний и фазы одинаковы, а амплитуды pазличны.

(4.49)
Чтобы найти тpаектоpию pезультиpующего движения, нужно из уpавнений (4.49) исключить вpемя. Для этого достаточно поделить почленно одно уpавнение на другое, в pезультате чего получим

(4.50)
Уpавнение (4.50) показывает, что в данном случае сложение колебаний пpиводит к колебанию по пpямой линии, тангенс угла наклона котоpой опpеделяется отношением амплитуд.
2. Пусть фазы складываемых колебаний отличаются дpуг от дpуга на /2 и уpавнения имеют вид:
(4.51)
Чтобы найти тpаектоpию pезультиpующего движения, исключив вpемя, нужно уpавнения (4.51) возвести в квадpат, пpедваpительно поделив их на А1 и А2 соответственно, а затем сложить. Уpавнение тpаектоpии пpимет вид:

(4.52)
Это - уpавнение эллипса. Можно доказать, что и пpи любых начальных фазах и любых амплитудах двух складываемых взаимно пеpпендикуляpных колебаний одинаковой частоты pезультиpующее колебание будет осуществляться по эллипсу. Его оpиентация будет зависеть от фаз и амплитуд складываемых колебаний.
Если же складываемые колебания имеют pазличные частоты, то тpаектоpии pезультиpующих движений получаются весьма pазнообpазными. Только в случае если частоты колебаний по х и по y кpатны дpуг дpугу, получаются замкнутые тpаектоpии. Такие движения можно отнести к числу пеpиодических. В этом случае тpаектоpии движений называются фигуpами Лиссажу. Рассмотpим одну из фигуp Лиссажу, котоpая получается пpи сложении колебаний с отношениями частот 1:2, с одинаковыми амплитудами и фазами в начале движения.

(4.53)
 Вдоль оси y колебания пpоисходят в два pаза чаще, чем вдоль оси х. Сложение таких колебаний пpиведет к траектоpии движения в виде восьмеpки (pис.4.7).
Вдоль оси y колебания пpоисходят в два pаза чаще, чем вдоль оси х. Сложение таких колебаний пpиведет к траектоpии движения в виде восьмеpки (pис.4.7).
8. Затухающие колебания и их параметры: декремент и коэффициент колебания, время релаксации
) Период затухающих колебаний:
Т =  (58)
(58)
При δ << ωo колебания не отличаются от гармонческих: Т = 2π / ωo.
2) Амплитуда затухающих колебаний выражается формулой (119).
3) Декремент затухания, равный отношению двух последовательных амплитуд колебаний А (t) и А (t+Т), характеризует быстроту уменьшения амплитуды за период:
 = ed Т (59)
= ed Т (59)
4) Логарифмический декремент затухания - натуральныйлогарифм отношения амплитуд двух последовательных колебаний, соответствующих моментам времени, отличающимся на период
q = ln = ln edТ =dT (60)
Логарифмический декремент затухания - постоянная для данной колебательной системы величина.
5) Временем релаксации принято называть промежуток времени (t) в течение которого амплитуда затухающих колебаний уменьшается в е раз:

 ed τ = е, δτ = 1,
ed τ = е, δτ = 1,
t = 1 /d, (61)
Из сравнения выражений (60) и (61) получим:
q =  =
=  , (62)
, (62)
где Ne — число колебаний, совершаемых за время релаксации.
В случае если за время t система совершает Ν колебаний, то t = Ν.Τ и уравнение затухающих колебаний можно представить в виде:
S = A0 e-d N T cos (w t+j) = A0 e-q N cos (w t+j).
6) Добротностью колебательной системы (Q) принято называть величина, характеризующая потерю энергии в системе за период колебаний:
Q = 2 p  , (63)
, (63)
где W - полная энергия системы, ΔW - энергия, рассеянная за период. Чем меньше энергии рассеивается, тем больше добротность системы. Расчеты показывают, что
Q =  = pNe =
= pNe =  =
=  . (64)
. (64)
Τᴀᴋᴎᴍ ᴏϬᴩᴀᴈᴏᴍ, добротность обратно пропорциональна логарифмическому декременту затухания. Из формулы (64) следует, что добротность пропорциональна числу колебаний Ne, совершаемых системой за время релаксации.
7) Потенциальную энергию системы в момент t, можно выразить через потенциальную энергию W 0 при наибольшем отклонении:
W =  =
=  kAo2 e-2qN = W0 e-2qN. (65)
kAo2 e-2qN = W0 e-2qN. (65)
Обычно условно считают, что колебания практически прекратились, в случае если их энергия уменьшилась в 100 раз (амплитуда уменьшилась в 10 раз). Отсюда можно получить выражение для расчета числа колебаний, совершенных системой:
 = e2qN = 100, ln100 = 2 qN;
= e2qN = 100, ln100 = 2 qN;
N =  =
=  . (66)
. (66)
9. Вынужденные колебания. Резонанс. Апериодические колебания. Автоколебания.
Для того чтобы система совершала незатухающие колебания, необходимо извне восполнять потери энергии колебаний на трение. Для того, чтобы энергия колебаний системы не убывала обычно вводят силу, периодически воздействующую на систему (такую силу будем называть вынуждающей, а колебания вынужденными).
ОПРЕДЕЛЕНИЕ: вынужденными называются такие колебания, которые возникают в колебательной системе под действием внешней периодически изменяющейся силы.
Эта сила, как правило, выполняет двоякую роль:
во-первых, она раскачивает систему и сообщает ей определенный запас энергии;
во-вторых, она периодически восполняет потери энергии (расход энергии) на преодоление сил сопротивления и трения.
Пусть вынуждающая сила изменяется со временем по закону:
 .
.
Составим уравнение движения для системы, колеблющейся под воздействием такой силы. Предполагаем, что на систему также действует квазиупругая сила  и сила сопротивления среды
и сила сопротивления среды  (что справедливо в предположении малости колебаний). Тогда уравнение движения системы будет иметь вид:
(что справедливо в предположении малости колебаний). Тогда уравнение движения системы будет иметь вид:
 или
или  .
.
Проведя подстановки  ,
,  ,
,  – собственная частота колебаний системы, получим неоднородное линейной дифференциальное уравнение 2 го порядка:
– собственная частота колебаний системы, получим неоднородное линейной дифференциальное уравнение 2 го порядка:
 .
.
Из теории дифференциальных уравнений известно, что общее решение неоднородного уравнения равно сумме общего решения однородного уравнения и частного решения неоднородного уравнения.
Общее решение однородного уравнения известно:
 ,
,
где  ; a 0 и a – произвольные const.
; a 0 и a – произвольные const.
Далее предположим, что частное (не содержащее произвольных констант) решение неоднородного уравнения имеет вид
 .
.
С помощью векторной диаграммы можно убедиться, что такое предположение справедливо, а также определить значения “ a ” и “ j ”.
Амплитуда колебаний определяется следующим выражением:
 .
.
Значение “ j ”, которое представляет собой величину отставания по фазе вынужденного колебания  от обусловившей его вынуждающей силы
от обусловившей его вынуждающей силы  , также определяется из векторной диаграммы и составляет:
, также определяется из векторной диаграммы и составляет:
 .
.
Окончательно, частное решение неоднородного уравнения примет вид:

| (8.18) |
Эта функция в сумме с

| (8.19) |
 дает общее решение неоднородного дифференциального уравнения, описывающего поведение системы при вынужденных колебаниях. Слагаемое (8.19) играет заметную роль в начальной стадии процесса, при так называемом установлении колебаний (рис. 8.10). С течением времени из-за экспоненциального множителя
дает общее решение неоднородного дифференциального уравнения, описывающего поведение системы при вынужденных колебаниях. Слагаемое (8.19) играет заметную роль в начальной стадии процесса, при так называемом установлении колебаний (рис. 8.10). С течением времени из-за экспоненциального множителя  роль второго слагаемого (8.19) все больше уменьшается, и по прошествии достаточного времени им можно пренебречь, сохраняя в решении лишь слагаемое (8.18).
роль второго слагаемого (8.19) все больше уменьшается, и по прошествии достаточного времени им можно пренебречь, сохраняя в решении лишь слагаемое (8.18).
Таким образом, функция (8.18) описывает установившиеся вынужденные колебания. Они представляют собой гармонические колебания с частотой равной частоте вынуждающей силы. Амплитуда вынужденных колебаний пропорциональна амплитуде вынуждающей силы. Для данной колебательной системы (определенных w0 и b) амплитуда зависит от частоты вынуждающей силы. Вынужденные колебания отстают по фазе от вынуждающей силы, причем величина отставания “j” также зависит от частоты вынуждающей силы.
Зависимость амплитуды вынужденных колебаний от частоты вынуждающей силы приводит к тому, что при некоторой определенной для данной системы частоте амплитуда колебаний достигает максимального значения. Колебательная система оказывается особенно отзывчивой на действие вынуждающей силы при этой частоте. Это явление называется резонансом, а соответствующая частота – резонансной частотой.
ОПРЕДЕЛЕНИЕ: явление, при котором наблюдается резкое возрастание амплитуды вынужденных колебаний, называется резонансом.
Резонансная частота определяется из условия максимума для амплитуды вынужденных колебаний:
 . (8.20)
. (8.20)
Тогда, подставив это значение в выражение для амплитуды, получим:
 . (8.21)
. (8.21)
При отсутствии сопротивления среды амплитуда колебаний при резонансе обращалась бы в бесконечность; резонансная частота при тех же условиях (b=0) совпадает с собственной частотой колебаний.
Зависимость амплитуды вынужденных колебаний от частоты вынуждающей силы (или, что то же самое, от частоты колебаний) можно представить графически (рис. 8.11). Отдельные кривые соответствуют различным значениям “b”. Чем меньше “b”, тем выше и правее лежит максимум данной кривой (см. выражение для wрез.). При очень большом затухании  резонанс не наблюдается – с увеличением частоты амплитуда вынужденных колебаний монотонно убывает (нижняя кривая на рис. 8.11).
резонанс не наблюдается – с увеличением частоты амплитуда вынужденных колебаний монотонно убывает (нижняя кривая на рис. 8.11).
 Совокупность представленных графиков, соответствующих различным значениям b, называется резонансными кривыми.
Совокупность представленных графиков, соответствующих различным значениям b, называется резонансными кривыми.
Замечания по поводу резонансных кривых:
при стремлении w®0 все кривые приходят к одному, отличному от нуля значению, равному  . Это значение представляет собой смещение из положения равновесия, которое получает система под действием постоянной силы F 0.
. Это значение представляет собой смещение из положения равновесия, которое получает система под действием постоянной силы F 0.
при w®¥ все кривые асимптотически стремятся к нулю, т.к. при большой частоте сила так быстро изменяет свое направление, что система не успевает заметно сместится из положения равновесия.
чем меньше b, тем сильнее изменяется с частотой амплитуда вблизи резонанса, тем «острее» максимум.
Примеры:
С явлением резонанса приходится считаться при конструировании машин, механизмов и сооружений (мосты, самолеты, корабли и т.п.).
Явление резонанса часто оказывается полезным, особенно в акустике и радиотехнике.
Автоколеба́ния — незатухающие колебания в диссипативной динамической системе с нелинейной обратной связью, поддерживающиеся за счёт энергии постоянного, то есть непериодического внешнего воздействия.[1]
Автоколебания отличаются от вынужденных колебаний тем, что последние вызваны периодическим внешним воздействием и происходят с частотой этого воздействия, в то время как возникновение автоколебаний и их частота определяются внутренними свойствами самой автоколебательной системы.
Термин автоколебания в русскоязычную терминологию введён А. А. Андроновым в 1928 году.
Примеры[
Примерами автоколебаний могут служить:
· незатухающие колебания маятника часов за счёт постоянного действия тяжести заводной гири;
· колебания скрипичной струны под воздействием равномерно движущегося смычка
· возникновение переменного тока в цепях мультивибратора и в других электронных генераторах при постоянном напряжении питания;
· колебание воздушного столба в трубе орга́на, при равномерной подаче воздуха в неё. (см. также Стоячая волна)
· вращательные колебания латунной часовой шестерёнки со стальной осью, подвешенной к магниту и закрученной (опыт Гамазкова) (кинетическая энергия колеса, как в униполярном генераторе преобразуется в потенциальную энергию электрического поля, потенциальная энергия электрического поля, как в униполярном двигателе, преобразуется в кинетическую энергию колеса и т. д.)
Молоток Маклакова
Молоток, совершающий удары за счёт энергии переменного тока с частотой, во много раз меньшей частоты тока в электрической цепи[2].

Катушка L колебательного контура помещается над столом (или другим предметом, по которому требуется ударять). Снизу в неё входит железная трубка, нижний конец которой является ударной частью молотка. В трубке есть вертикальная прорезь, чтобы уменьшить токи Фуко. Параметры колебательного контура такие, что собственная частота его колебаний совпадает с частотой тока в цепи (например, переменного городского тока, 50 герц).
После включения тока и установления колебаний наблюдается резонанс токов контура и внешней цепи, и железная трубка втягивается в катушку. Индуктивность катушки растёт, колебательный контур выходит из резонанса, а амплитуда колебаний тока в катушке уменьшается. Поэтому трубка возвращается в исходное положение — вне катушки — под действием силы тяжести. Затем колебания тока внутри контура начинают нарастать, и снова наступает резонанс: трубка опять втягивается в катушку.
Трубка совершает автоколебания, то есть периодические движения вверх и вниз, и при этом громко стучит по столу, подобно молотку. Период этих механических автоколебаний в десятки раз превосходит период переменного тока, поддерживающего их.
Молоток назван по имени М. И. Маклакова, лекционного ассистента Московского физико-технического института, предложившего и осуществившего такой опыт для демонстрации автоколебаний.
Механизм автоколебаний

Рис 1. Механизм автоколебаний
Автоколебания могут иметь различную природу: механическую, тепловую, электромагнитную, химическую. Механизм возникновения и поддержания автоколебаний в разных системах может основываться на разных законах физики или химии. Для точного количественного описания автоколебаний разных систем может потребоваться разный математический аппарат. Тем не менее, можно представить схему, общую для всех автоколебательных систем, качественно описывающую этот механизм (рис. 1).
На схеме: S — источник постоянного (непериодического) воздействия; R — нелинейный регулятор, преобразующий постоянное воздействие в переменное (например, в прерывистое во времени), которое и «раскачивает» осциллятор V — колеблющийся элемент (элементы) системы, а колебания осциллятора через обратную связь B управляют работой регулятора R, задавая фазу и частоту его действия. Диссипация (рассеивание энергии) в автоколебательной системе возмещается за счёт поступления в неё энергии из источника постоянного воздействия, благодаря чему автоколебания не затухают.

Рис. 2 Схема храпового механизма маятниковых часов
Если колеблющийся элемент системы способен к собственным затухающим колебаниям (т. н. гармонический диссипативный осциллятор), автоколебания (при равенстве диссипации и поступления энергии в систему за время периода) устанавливаются на частоте, близкой к резонансной для этого осциллятора, их форма становится близкой к гармонической, а амплитуда, в некотором диапазоне значений, тем больше, чем больше величина постоянного внешнего воздействия.
Примером такого рода системы может служить храповой механизм маятниковых часов, схема которого представлена на рис. 2. На ось храпового колеса A (которое в этой системе выполняет функцию нелинейного регулятора) действует постоянный момент силы M, передающийся через зубчатую передачу от заводной пружины или от гири. При вращении колеса A его зубцы сообщают кратковременные импульсы силы маятнику P (осциллятору), благодаря которым его колебания не затухают. Кинематика механизма играет роль обратной связи в системе, синхронизируя вращение колеса с колебаниями маятника таким образом, что за полный период колебания колесо поворачивается на угол, соответствующий одному зубцу.
Автоколебательные системы, не содержащие гармонических осцилляторов, называются релаксационными. Колебания в них могут сильно отличаться от гармонических, и иметь прямоугольную, треугольную или трапецеидальную форму. Амплитуда и период релаксационных автоколебаний определяются соотношением величины постоянного воздействия и характеристик инерционности и диссипации системы.

Рис. 3 Электрозвонок
Простейшим примером релаксационных автоколебаний может служить работа электрического звонка, изображённого на рис. 3. Источником постоянного (непериодического) воздействия здесь является электрическая батарея U; роль нелинейного регулятора выполняет прерыватель T, замыкающий и размыкающий электрическую цепь, в результате чего в ней возникает прерывистый ток; колеблющимися элементами являются магнитное поле, периодически наводимое в сердечнике электромагнита E, и якорь A, движущийся под воздействием переменного магнитного поля. Колебания якоря приводят в действие прерыватель, что и образует обратную связь.
Инерционность этой системы определяется двумя различными физическими величинами: моментом инерции якоря А и индуктивностью обмотки электромагнита E. Увеличение любого из этих параметров приводит к увеличению периода автоколебаний.
При наличии в системе нескольких элементов, колеблющихся независимо друг от друга, и одновременно воздействующих на нелинейный регулятор или регуляторы (которых тоже может быть несколько), автоколебания могут принимать более сложный характер, например, апериодический, или динамический хаос.
В природе и технике
Автоколебания лежат в основе многих явлений природы:
· колебания листьев растений под действием равномерного потока воздуха;
· образование турбулентных потоков на перекатах и порогах рек;
· голоса людей, животных и птиц образуются благодаря автоколебаниям, возникающим при прохождении воздуха через голосовые связки;
· действие регулярных гейзеров и пр.
На автоколебаниях основан принцип действия большого количества всевозможных технических устройств и приспособлений, в том числе:
· работа всевозможных часов, как механических, так и электрических;
· звучание всех духовых и струнно-смычковых музыкальных инструментов;