1. Получить выражение для передаточной функции исследуемого объекта.
2. В передаточной функции заменить р на j.
3. Освободиться от старших степеней j, используя следующие правила:
j = j; j2 = –1; j3 = j2j = –j; j4 = 1; j5 = j4j = j и т.д.
4. В знаменателе передаточной функции сгруппировать члены содержащие и не содержащие j.
5. Освободиться от иррациональности в знаменателе. Для этого числитель и знаменатель домножить на выражение, сопряженное выражению в знаменателе относительно j.
6. В числителе передаточной функции сгруппировать члены содержащие и не содержащие j.
7. Выделить Re() и Im().
8. Рассчитать все частотные характеристики и построить их графики.
58. Дайте определение трем основным случаям поведения системы после возмущающего воздействия.
1) система не может восстановить равновесное состояние, значения управляемой переменной (выходной величины) все больше откланяется от заданного, такой процесс называется расходящимся, а система неустойчивой; 2) Система возвращается в равновесное состояние значение управляемой переменной отличается от заданного на величину статической ошибки, такой процесс называется сходящимся, а система устойчивой; 3) Система характеризуется установившимся периодическим движением, такой процесс называется колебательным, а система будет находиться на границе асимптотической устойчивости.
59. Дайте определение устойчивости САУ в малом.
Система устойчива "в малом", если определен факт наличия устойчивости, но не определены ее границы.
60. Дайте определение устойчивости САУ в целом.
Система устойчива в целом, если она устойчива при любых отклонениях.
61. Дайте определение устойчивости САУ по Ляпунову.
Устойчивым равновесным состоянием принято называть состояние, в ĸᴏᴛᴏᴩᴏᴇ возвращается объект после снятия внешней силы, выведшей его из этого состояния. Аналогично для движения САУ можно дать следующее определœение: движение САУ принято называть устойчивым, в случае если по истечению определœенного времени система возвращается в это движение после снятия внешнего воздействия, выведшего данную САУ из данного движения.
62. Представьте порядок определения запасов устойчивости по амплитуде и фазе.
О запасе устойчивости можно судить по расположению корней характеристического уравнения САР на комплексной плоскости корней (рис. 1). Чем дальше они отстоят от мнимой оси в левой полуплоскости, тем больше запас устойчивости.

Рис. 1. Комплексная плоскость корней
Каждый критерий устойчивости также позволяет определять запас устойчивости системы. Однако, наибольшее применение на практике находит критерий Найквиста. Устойчивость САР зависит от расположения годографа Найквиста относительно критической точки с координатами (-1, j0). Чем ближе эта кривая проходит от критической точки, тем ближе САР к границе устойчивости.
Для устойчивых САР выделяют запасы устойчивости по амплитуде h и по фазе g.
Запас устойчивости по амплитудеh – это минимальный отрезок, характеризующий расстояние между критической точкой и ближайшей точкой пересечения годографом Найквиста вещественной оси на отрезке [0, -1] (рис. 2).
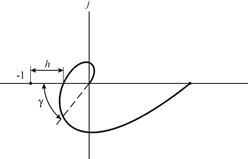
Рис.2. Определение запасов устойчивости по критерию Найквиста
Запас устойчивости по фазе g - это минимальный угол, образуемый радиусом, проходящим через точку пересечения годографа Найквиста с окружностью единичного радиуса с центром в начале координат и отрицательной вещественной полуосью.
Система обладает необходимым запасом устойчивости, если она удовлетворяет условию устойчивости и имеет значение модуля  , отличающееся от единицы не менее, чем на заданную величину h (запас устойчивости по амплитуде) и угол поворота или фазу, отличающуюся от (-p) не менее, чем на величину g (запас устойчивости по фазе) (рис. 4.14).
, отличающееся от единицы не менее, чем на заданную величину h (запас устойчивости по амплитуде) и угол поворота или фазу, отличающуюся от (-p) не менее, чем на величину g (запас устойчивости по фазе) (рис. 4.14).

Рис.3. Требуемые запасы устойчивости САР
В случае применения логарифмического критерия для анализа устойчивости САР запасы устойчивости определяются по логарифмическим частотным характеристикам, так как показано на рис. 4.15.

Рис.3. Определение запасов устойчивости по логарифмическим частотным характеристикам
63. Дайте определение нелинейной системе автоматического управления.
К нелинейным системам автоматического управления относятся такие системы, в которых связь между выходной и входной величинами одного или нескольких основных элементов задается нелинейными уравнениями.
В общем случае каждая система автоматического управления имеет те или иные нелинейности, однако часто эти нелинейности влияют столь незначительно, что поведение системы с достаточной точностью может быть описано только линейными дифференциальными уравнениями. Нелинейные уравнения процессов в такой системе заменяют приближенными линейными уравнениями и исследуют систему как линейную.
Вопрос о возможности линеаризации уравнений или процессов в системе решают исходя из требования точности расчетов. Часто решение этого вопроса зависит от того, при каких отклонениях переменных величин работает система.
Одну и ту же систему в зависимости от конкретных условий работы, а также от принятой степени идеализации процессов, протекающих в ней, можно рассматривать как линейную и как нелинейную. Однако какие же системы в теории автоматического управления относятся к нелинейным? Это такие системы, которые нельзя рассматривать как линейные даже при малых отклонениях переменных, иначе говоря, такие системы, которые имеют существенно нелинейные характеристики.
Сущесmвенно нелинейными называются такие характеристики, которые в некоторых тачках рабочего интервала неоднозначны, терпят разрыв или вообще не существуют.
Системы с существенно нелинейными элементами линеаризовать методами, рассмотренными при рассмотрении линейных систем, невозможно. Если ограничиться линеаризацией в тех точках, где она допустима, и попытаться анализировать систему как линейную во всем рабочем диапазоне, то можно получить неверные результаты.
Нелинейные системы классифицируют по виду существенно нелинейных элементов, входящих в систему. Следовательно, классификация нелинейных систем сводится к классификации существенно нелинейных характеристик элементов.
64. Проклассифицируйте нелинейные система по способам аппроксимации.
К наиболее распространенным способам аппроксимации нелинейных элементов относят следующие:
· полиномиальная аппроксимация ─ представление нелинейной характеристики с помощью степенного ряда,
· кусочно-линейная аппроксимация ─ представление аппроксимируемой функции отрезками прямых линий,
· аппроксимация с помощью различных видов трансцендентных функций.
Полиномиальная аппроксимация. Если любая из нелинейных характеристик задана аналитическим выражением, то в окрестности рабочей точки функция может быть представлена разложением в ряд Тейлора ( в окрестности точки х0)
в окрестности точки х0)

или
 , (3.16)
, (3.16)
где R – остаток в разложении в ряд Тейлора, которым пренебрегают при аппроксимации.
Если же характеристика задана графически (рис.3.9), то аппроксимацию можно осуществить укороченным степенным рядом (полином), ограничивая его второй - пятой степенью
 . (3.17)
. (3.17)
 Рис.3.9. Графическое представление нелинейной характеристики
Рис.3.9. Графическое представление нелинейной характеристики
Для определения коэффициентов аk требуем, чтобы при значениях переменной xk в левой части полинома (3.17) получались значения функции yk.
Составляем систему уравнений:
 , где
, где  . (3.18)
. (3.18)
В этой системе уравнений yn, у0, xn, x0 – известные величины, поэтому эту систему можно решить по методу Крамера, относительно коэффициентов ak.
Если x=x0+S (х0 постоянное смещение, а S малый сигнал), то
 , (3.19)
, (3.19)
где α – дифференциальный параметр нелинейного элемента. Таким образом, можно отметить, что первый коэффициент a1полиномиальной аппроксимации нелинейной характеристики (3.17) совпадает с дифференциальным параметром нелинейного элемента. Кроме того отметим, что если х=0 лежит внутри интервала (х5-х1) аппроксимации нелинейной характеристики полиномом, то коэффициент а0 определяет значение функции в начале координат (т.е. если мы рассматриваем в качестве нелинейной характеристики i=φ(u), то коэффициент а0=i(0) определяется как значение тока при u=0.
Кусочно-линейная аппроксимация. Кусочно-линейная аппроксимация основана на замене реальной характеристики нелинейного элемента отдельными участками, которые заменяются отрезками прямых линий (рис.3.10).
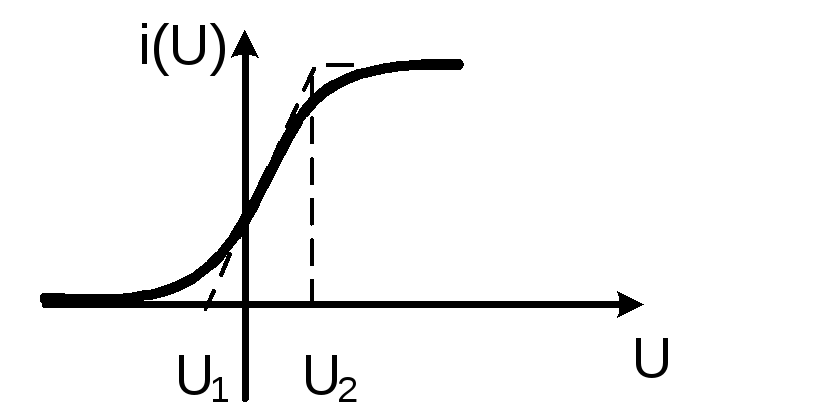 Рис.3.10. Кусочно-линейная аппроксимация нелинейного элемента
Рис.3.10. Кусочно-линейная аппроксимация нелинейного элемента
Точность кусочно-линейного приближения зависит от количества интервалов, заменяемых отрезками прямых в заданном интервале использования кусочно-линейной аппроксимации. Чем на большее количество отрезков прямых разбит интервал, для которого мы применяем кусочно-линейное приближение, тем выше точность совпадения с реальной нелинейной характеристикой, но при этом сушественно усложняется анализ колебаний в такой системе. Для упрощения расчетов желательно ограничиваться минимальным количеством отрезков прямых, замещающих нелинейную характеристику. Например, динамическую проходную характеристику триода (рис.3.10) можно аппроксимировать с достаточной степенью точности всего лишь тремя отрезками прямых линий:
 . (3.20)
. (3.20)
Замена нелинейных участков характеристик нелинейных элементов отрезками прямых, прозволяет считать и сами характеристики линейными, а это значит, что применимы теперь все методы линейной теории цепей. На протяжении линейных участков нелинейные элементы заменяются на линейные, с характеристиками равными их дифференциальным величинам.
Аппроксимация нелинейных характеристик с помощью трансцендентных функций. Иногда характеристики нелинейных элементов аппроксимируют трансцендентными функциями рис.3.11. В качестве аппроксимирующих трансцендентных функций применяются экспоненты и их суммы, тригонометрические, обратные тригонометрические, гиперболические и другие функции. Например,
 или
или  . (3.21)
. (3.21)
 Рис.3.11. Примеры аппроксимации нелинейных характеристик
Рис.3.11. Примеры аппроксимации нелинейных характеристик
трансцендентными функциям
65. Проклассифицируйте нелинейные система по статическим и динамическим характеристикам.
Различают статические и динамические нелинейности.
Первые представляются в виде нелинейных статических характеристик. Вторые – в виде нелинейных диф.ур. с переменными коэффициентами при производных. Статические характеристики нелинейных звеньев могут быть однозначными, неоднозначными релейными, сложными неоднозначными в виде поля.



 Все нелинейные звенья делят на аналитические (аналитические описания нелинейные характеристики) и неаналитические (характеристика, описывается с указанием логических условий). Указанные нелинейности могут быть разделены на сопутствующие и преднамеренные. В зависимости от этого нелинейные САУ делятся на 2 группы:
Все нелинейные звенья делят на аналитические (аналитические описания нелинейные характеристики) и неаналитические (характеристика, описывается с указанием логических условий). Указанные нелинейности могут быть разделены на сопутствующие и преднамеренные. В зависимости от этого нелинейные САУ делятся на 2 группы:
1) с сопутствующими нелинейностями, т.е. нелинейности, проектированные как линеаризованные, но из-за наличия насыщения люфта, мертвого хода, сухого трения, являющиеся практически нелинейными.
2) с преднамеренными нелинейностями, т.е. проектируемые по заданию как нелинейные.
В нелинейных системах выделяют: линеаризованные нелинейные системы, существенно нелинейные (НС).
Если нелинейность системы определяется незначительными величинами люфта насыщения усилителя, то поведение такой системы в ряде случаев на отличается от поведения линейной модели этой системы, следовательно, система может рассматриваться как линеаризованная. При наличии существенных нелинейностей, поведения нелинейной системы значительно отличается от поведения ее линейной модели. Из-за нелинейности характеристик такой системы выходная переменная непропорциональна входной, следовательно, форма реакции системы на скачкообразный сигнал будет зависеть от величины этого сигнала. Для ряда нелинейных систем изменение величины входного сигнала может привести к превращению устойчивого переходного процесса к неустойчивому и наоборот. Характер процессов в нелинейной системе часто зависит от величины начального отклонения, вызванного возмущением.
66. Проклассифицируйте нелинейные система по физическим принципам действия.
Электрические; магнитные; тепловые; механические; оптические.
67. Назовите виды статических характеристик нелинейных звеньев.
Статические нелинейности могут быть непрерывными или релейными, петлевыми гистерезисными или петлевыми опережающими. Простейшими нелинейными элементами являются статические (безынерционные) однознач-ные нелинейности.