Практически все системы управления, строго говоря, являются нелинейными, т.е. описываются нелинейными уравнениями. Линейные системы управления являются их линейными моделями, которые получаются путем обычной линеаризации — линеаризации, состоящей в разложении нелинейных функций в ряд Тейлора и отбрасывании нелинейных слагаемых. Однако такая линеаризация не всегда возможна. Если нелинейность допускает обычную линеаризацию, то такая нелинейность называется несущественной. В противном случае нелинейность называется существенной. Существенными нелинейностями обладают всякого рода релейные элементы. Даже в тех случаях, когда обычная линеаризация возможна, часто на конечном этапе исследования может потребоваться рассмотрение исходной нелинейной модели.
Нелинейной системой автоматического регулирования называют такую систему, которая содержит хотя бы одно звено, описываемое нелинейным уравнением.
Виды нелинейных звеньев:
- звено релейного типа;
- звено с кусочно-линейной характеристикой;
- звено с криволинейной характеристикой любого очертания;
- звено, уравнение которого содержит произведение переменных или их производных и другие их комбинации;
- нелинейное звено с запаздыванием;
- нелинейное импульсное звено;
- логическое звено;
- звенья, описываемые кусочно-линейными ДУ, в том числе с переменной структурой.

На рис. 2.1 представлены релейные характеристики разных видов:
- характеристика идеального реле (а);
- характеристика реле с зоной нечувствительности (б);
- характеристика реле с гистерезисом (в);
- характеристика реле с зоной нечувствительности и гистерезисом (г);
- характеристика квантования по уровню (д).
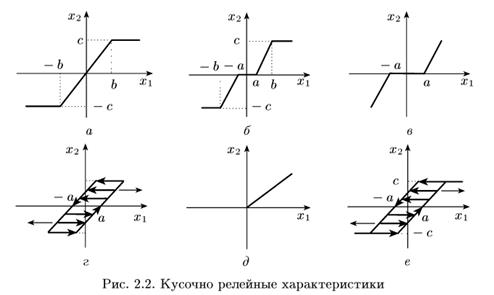
На рис. 2.2 представлены кусочно-линейные характеристики:
- кусочно-линейная характеристика с насыщением (а);
- кусочно-линейная характеристика с зоной нечувствительности и насыщением (б)
- кусочно-линейная характеристика с зоной нечувствительности (в);
- люфт (характеристика звена с люфтом) (г);
- диодная характеристика (д);
- кусочно-линейная характеристика с гистерезисом и насыщением (е).
Различаются статические и динамические нелинейности. Первые представляются в виде нелинейных статических характеристик, вторые – в виде нелинейных дифференциальных уравнений.
Привод регулирующего органа, каким бы он ни был (электрическим, гидравлическим или пневматическим) всегда имеет, во-первых, зону нечувствительности в начале координат; во-вторых, зону насыщения по краям. Кроме того, может иметь место еще гистерезис. Также существуют приводы с постоянной скоростью, относящиеся к звеньям релейного типа.

Зона нечувствительности выражается тем, что двигатель имеет определенный минимальный ток трогания, до достижения которого двигатель будет неподвижен.
ГИСТЕРЕЗИС (от греч. hysteresis - отставание, запаздывание), явление, которое состоит в том, что физ. величина, характеризующая состояние тела (напр., намагниченность), неоднозначно зависит от физ. величины, характеризующей внешние условия (напр., магнитного поля). Г. наблюдается в тех случаях, когда состояние тела в данный момент времени определяется внешними условиями не только в тот же, но и в предшествующие моменты времени. Неоднозначная зависимость величин наблюдается в любых процессах, т. к. для изменения состояния тела всегда требуется определённое время (время релаксации) и реакция тела отстаёт от вызывающих её причин.


Нелинейные системы по сравнению с линейными обладают рядом принципиальных особенностей. В частности, такими особенностями является следующее:
— не выполняется принцип суперпозиции, и исследование нелинейной системы при нескольких воздействиях нельзя сводить к исследованию при одном воздействии;
— устойчивость и характер переходного процесса зависят от величины начального отклонения от положения равновесия;
— при фиксированных внешних воздействиях возможны несколько (а иногда и бесконечное множество) положений равновесия;
— возникают свободные установившиеся процессы, которые в линейных системах невозможны (например, автоколебания).
Универсальных аналитических (математических) методов исследования нелинейных систем нет. В процессе развития теории автоматического управления были разработаны различные математические методы анализа и синтеза нелинейных систем, каждый из которых применим для определенного класса систем и задач. Наиболее широко используемыми методами исследования нелинейных систем являются:
— метод фазовой плоскости;
— метод функций Ляпунова;
— метод гармонической линеаризации (метод гармонического баланса);
— методы исследования абсолютной устойчивости.
Любое исследование более или менее сложных нелинейных систем, как привило, заканчивается математическим моделированием. И в этом отношении математическое моделирование является одним из универсальных (неаналитических) методов исследования.



Фазовая плоскость
Если уравнения системы управления представлены в нормальной форме, то вектор состояния системы однозначно определяет ее состояние. Каждому состоянию системы в пространстве состояний соответствует точка. Точка, соответствующая текущему состоянию системы, называется изображающей точкой. При изменении состояния изображающая точка описывает траекторию. Эта траектория называется фазовой траекторией. Совокупность фазовых траекторий, соответствующая всевозможным начальным условиям, называется фазовым портретом.
Наглядно фазовую траекторию и фазовый портрет можно представить в случае двухмерного фазового пространства. Двухмерное фазовое пространство называется фазовой плоскостью.
Фазовая плоскость — это координатная плоскость, в которой по осям координат откладываются две переменные (фазовые координаты), однозначно определяющие состояние системы второго порядка.
Метод анализа и синтеза системы управления, основанный на построении фазового портрета, называют методом фазовой плоскости.

По фазовому портрету можно судить о характере переходных процессов. В частности, по фазовой траектории можно построить без расчетов качественно временную характеристику — кривую зависимости х от времени, и, наоборот, по временной характеристике можно качественно построить фазовую траекторию.
В качестве примера сначала по фазовой траектории построим временную характеристику, а затем по временной характеристике — фазовую траекторию. Пусть задана фазовая траектория (рис. 2.4, а).

Отметив на ней характерные точки (начальную точку, точки пересечения с осями координат), нанесем соответствующие им точки на временной плоскости и соединим их плавной кривой (рис. 2.4, б).
Пусть теперь задана временная характеристика (рис. 2.5, а). Отметив на ней характерные точки (начальную точку, точки экстремума и точки пересечения с временной осью), нанесем соответствующие им точки на фазовую плоскость и соединим их плавной кривой
(рис. 2.5,6).

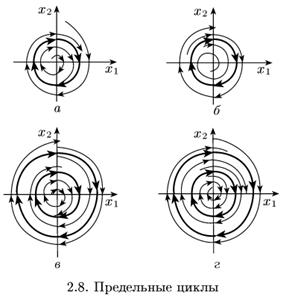
Фазовые портреты нелинейных систем могут содержать тип особой кривой — изолированные замкнутые траектории. Эти кривые называются предельными циклами. Если изнутри и снаружи фазовые траектории сходятся к предельному циклу (рис. 2.8, а),
то такой предельный цикл называется устойчивым предельным циклом. Устойчивому предельному циклу соответствует асимптотически орбитально-устойчивое периодическое движение (автоколебания).
Если фазовые траектории изнутри и снаружи предельного цикла удаляются от него (рис. 2.8,6), такой предельный цикл называется неустойчивым предельным циклом. Периодический процесс, соответствующий неустойчивому предельному циклу, нельзя наблюдать.
Если движение начинается внутри такого предельного цикла, то процесс сходится к положению равновесия. Если движение начинается вне такого предельного цикла, то процесс расходится. Неустойчивый предельный цикл служит границей области притяжения, или границей устойчивости положения равновесия (начала координат).
Возможны два предельных цикла (рис. 2.8, в, г). Внутренний пре-
предельный цикл на рис. 2.8, в устойчив, и ему соответствуют автоколебания, а наружный предельный цикл неустойчив и является границей области автоколебаний: автоколебания возникают при любых начальных отклонениях, не выходящих за наружный предельный цикл.
Наружный предельный цикл на рис. 2.8, г является устойчивым и соответствует автоколебаниям, а внутренний предельный цикл является неустойчивым и является границей области притяжения положения равновесия. В системе с таким фазовым портретом автоколебания возникают при достаточно большом отклонении системы от положения равновесия — отклонении, выходящем за пределы внутреннего предельного цикла. Если движение системы начинается внутри неустойчивого предельного цикла, то она приближается к положению равновесия.
Метод гармонической линеаризации
Метод гармонической линеаризации, или метод гармонического баланса, первоначально был разработан для исследования периодического режима. Однако в дальнейшем он стал использоваться также для анализа устойчивости и синтеза нелинейных систем.
Основная идея метода состоит в следующем. Управляемые системы (объекты), как правило, обладают свойством фильтра низких частот: при возникновении периодических режимов они не пропускают или пропускают с большим ослаблением вторые и более высокие гармоники. И суть метода гармонической линеаризации состоит в описании нелинейного звена линейным уравнением, которое получается при пренебрежении (отбрасывании) указанными гармониками в разложении нелинейной функции в ряд Фурье.
Метод гармонической линеаризации является приближенным методом. Однако его достоинством является то, что он применим для систем любого порядка, в отличие от метода фазовой плоскости, который может быть эффективно применен только к системам 2-го порядка.

Метод Гольдфарба (метод исследования симметричных автоколебаний)


Метод функций Ляпунова
Метод исследований, основанный на построении функции Ляпунова, включая прямой метод Ляпунова, стали называть методом функций Ляпунова.
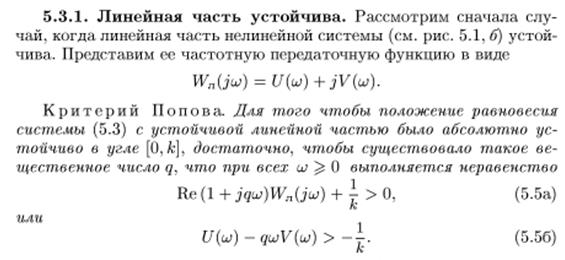
Метод исследования абсолютной устойчивости
Впервые задача об абсолютной устойчивости была рассмотрена А. И. Лурье, и ее иногда называют задачей Лурье. Им был разработан метод решения этой задачи, основанный на построении функции Ляпунова. В 1961г. румынский ученый В.М. Попов опубликовал работу, в которой изложил частотный метод решения этой проблемы. Это повлекло за собой появление большого потока работ в этом направлении.

Для заданий:
Связь переходного процесса и фазового портрета:




(Бесекерский-Попов стр 595 много всего)

