Синтез линейных систем. Методы и задачи синтеза. Структурная устойчивость САУ, влияние ее параметров на устойчивость. Графический способ синтеза с помощью построения ЛАЧХ.

При синтезе систем автоматического управления (САУ) могут быть выделены следующие частные задачи:
- обеспечение устойчивости (стабилизация);
- повышение запаса устойчивости (демпфирование);
- повышение точности регулирования в типовых режимах (уменьшение или устранение статической ошибки воспроизведения задающего воздействия, уменьшение или устранение влияния постоянных возмущений);
- улучшение качества переходных процессов (увеличение быстродействия, уменьшение динамических ошибок воспроизведения входного воздействия и т.д.).
Если при решении задачи повышения запаса устойчивости и качества САУ невозможно добиться положительных результатов простым изменением параметров системы (коэффициентов передачи отдельных звеньев, постоянных времени и т.п.), в таком случае возникает необходимость введения в САУ дополнительных устройств. Обеспечение устойчивости и качественной работы САУ с помощью дополнительных устройств называется коррекцией, а сами устройства – корректирующими.
Синтез системы путем изменения ее параметров называется параметрическим синтезом, а синтез путем ввода вспомогательных устройств – структурным.
Структурная устойчивость
Структурно-устойчивыми называются системы, которые при каких-либо значениях их параметров могут стать устойчивыми. Структурно-неустойчивыми называются системы, которые не могут стать устойчивыми ни при каких комбинациях значений их параметров.
Вопросы структурной устойчивости возникают при введении дополнительных звеньев, т.е. получаемая система должна быть, в первую очередь, структурно-устойчивой. В ряде случаев по виду структурной схемы можно определить, является система структурно-устойчивой или структурно-неустойчивой.
Система является структурно-устойчивой, если в ее состав входят только устойчивые инерционные и колебательные звенья. Хорошей геометрической интерпретацией является рассмотрение годографа Найквиста.
Пусть система состоит из одного интегрирующего и устойчивых инерционных и колебательных звеньев. В этом случае годограф Михайлова имеет вид, изображенный на рис. а. Анализ этого годографа показывает, что при достаточно малых возмущениях весь годограф сдвигается немного вправо и система становится устойчивой, следовательно, система с одним интегрирующим звеном структурно-устойчива.
Система, состоящая из двух интегрирующих звеньев и любого числа устойчивых инерционных и колебательных звеньев, структурно- неустойчива. Годограф Михайлова этой системы изображен на рис. б, из которого видно, что никакими возмущениями не удастся сдвинуть годограф вправо таким образом, чтобы система стала устойчивой.

Коррекция свойств САУ изменением параметров звеньев
Рассмотрим примеры коррекции свойств некоторой исходной замкнутой САУ (рис.104), передаточная функция которой в разомкнутом состоянии:

Для этого воспользуемся критерием Найквиста. Значения параметров звеньев в каждом конкретном случае будем оговаривать отдельно.
Изменение коэффициента передачи
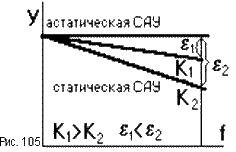
Для увеличения точности статической САУ надо увеличивать коэффициент передачи K. С ростом K увеличивается жесткость статической характеристики САУ (рис.105), то есть уменьшается статическая ошибка e.
На рис.106 сплошными линиями показаны частотные характеристики исходной разомкнутой САУ при T1 = 0.5c, T2 = 0.02c, T3 = 0.002c, K = 10.


То есть, при повышении точности САУ путем увеличения коэффициента передачи необходимы мероприятия по повышению запаса устойчивости. Это главный недостаток такой коррекции.
К достоинствам можно отнести повышение быстродействия САУ, так как частота среза wср увеличивается, следовательно постоянная времени САУ - уменьшается.
Изменение постоянной времени звена САУ

На рис.107 сплошными линиями изображены ЛЧХ разомкнутой САУ с параметрами: T1 = 0.05c, T2 = 0.01c, T3 = 0.001c, K = 100. Из рисунка видно, что САУ неустойчива. При увеличении постоянной времени T1 в 5 раз (T1’ = 0.2с) ЛАЧХ и ЛФЧХ приобретают вид, показанный на рисунке пунктирной линией. При этом видим, что замкнутая САУ становится устойчивой. Заметим, что сопрягающая частота W1 данного звена располагается левее частоты среза Wср.
Если бы она располагалась правее частоты среза, то есть, если бы мы увеличивали постоянную времени, например, третьего звена T3, то это привело бы к уменьшению запаса устойчивости.
Частотные характеристики для этого случая приведены на рис.108

Аналогичное влияние оказывает постоянная времени колебательного звена. Влияние постоянной времени форсирующего звена обратное, то есть, если сопрягающая частота форсирующего звена располагается левее частоты среза, то увеличение его постоянной времени уменьшает запас устойчивости САУ, если правее, то запас устойчивости увеличивается.
Указанные зависимости справедливы лишь при условии, что сопрягающая частота расположена на некотором удалении (около одной декады) от частоты среза. Бывают и исключения из этого правила.
Корректирующие устройства
Как уже неоднократно говорилось, одним из приемов обеспечения устойчивости и запаса устойчивости системы является введение в нее дополнительного элемента, который исправляет, корректирует свойства исходной системы и называется корректирующим элементом.
Если этот элемент достаточно сложен, то он называется корректирующим устройством. Таким образом, корректирующее устройство − это функциональный элемент системы автоматического регулирования по отклонению, обеспечивающий необходимые динамические свойства этой системы. Включаются эти элементы в систему различным образом.
Последовательная коррекция это коррекция САУ с помощью корректирующего устройства, последовательно включенного в прямую цепь системы (непосредственно в контур регулирования).

Рисунок 1 – последовательная коррекция
Wнск (s) – передаточная функция нескорректированной системы;
Wк (s) – передаточная функция корректирующего звена;
Wск (s) – передаточная функция скорректированной системы.
Параллельная коррекция это коррекция САУ с помощью корректирующего устройства, включенного в цепь специальной обратной связи. Обратные связи имеют наиболее широкое применение вследствие простоты технической реализации. К тому же, корректирующие устройства различного типа оказывают различное влияние на содержащиеся в системе нелинейности. Отрицательные же обратные связи имеют свойство уменьшать влияние нелинейностей тех участков цепи регулирования, которые ими охватываются.

Рисунок 2 – параллельная коррекция
Wнск (s) = W1 (s) · Wохв (s) · W2 (s),
 ,
,
 ,
,
Графический метод построения ЛАЧХ
Благодаря своей простоте метод логарифмических частотных характеристик оказывается наиболее простым методом синтеза стационарных линейных систем. Так как для минимально-фазовых систем существует однозначная зависимость между ЛАЧХ и ЛФЧХ, при синтезе системы достаточно построить желаемую ЛАЧХ.
В инженерной практике синтез корректирующих устройств с помощью логарифмических частотных характеристик осуществляется в следующем порядке:
1) по виду передаточной функции WН (р) строится ЛАХ исходной разомкнутой нескорректированной САУ  ;
;
2) с учетом всей совокупности требований, предъявляемых к качеству процесса регулирования САУ, строится желаемая логарифмическая амплитудная частотная характеристика  разомкнутой системы;
разомкнутой системы;
3) на основании сравнения ЛАХ нескорректированной системы с желаемой определяется ЛАХ корректирующего звена  ;
;
4) по виду определяются передаточная функция корректирующего звена WКЗ (р), ее параметры и техническая реализация;
5) производится проверочный расчет переходного процесса с учетом реальной структуры и места включения корректирующего звена, оценка запасов устойчивости и показателей качества скорректированной САУ.
Если скорректированная САУ удовлетворяет заданным показателям качества, то синтез на этом заканчивается. В противном случае уточняется структура и параметры корректирующего звена; далее снова производится проверочный расчет.
План нахождения ЛАХ корректирующего звена и соответственно передаточной функции корректирующего звена WКЗ:
последовательная коррекиця
Wск (s) = Wк (s) · Wнск (s),
Wск (jω) = Wк (jω) · Wнск (jω),
|Wск (jω)| = |Wк (jω)| · |Wнск (jω)|,
Lск (ω) = Lк (ω) + Lнск (ω),
Lк (ω) = Lск (ω) - Lнск (ω).
параллельная коррекция
 .
.
1 рассмотрим диапазон частот, где  << 1, это область низких частот.
<< 1, это область низких частот.  ,
,  .
.
2 рассмотрим диапазон частот, где >> 1. В этом случае  ,
,
 ,
,
 .
.
Таким образом, для нахождения ЛАЧХ корректирующего звена необходимо построить 5 графиков:
1. Lнск (ω);
2. Lск (ω);
3. Lп (ω) = Lнск (ω) - Lск (ω);
4. Lохв (ω);
5. Lос (ω) = Lп (ω) - Lохв (ω).
Выбор желаемой ЛАЧХ
Построение желаемой ЛАХ удобно первоначально осуществлять раздельно в низкочастотном (I),
среднечастотном (II),
высокочастотном (III) диапазонах.
Построение ЛАХ в низкочастотном диапазоне
На низкочастотном участке, где вид  определяется в основном требованиями к точности регулирования, а следовательно, величиной коэффициента усиления системы, порядком ее астатизма, значением коэффициента ошибки и т.д.
определяется в основном требованиями к точности регулирования, а следовательно, величиной коэффициента усиления системы, порядком ее астатизма, значением коэффициента ошибки и т.д.
Если в системе, отрабатывающей ступенчатый входной сигнал  , допустимая статическая ошибка не должна превышать значения
, допустимая статическая ошибка не должна превышать значения  , то величина коэффициента усиления разомкнутой скорректированной системы:
, то величина коэффициента усиления разомкнутой скорректированной системы:
 .
.
При этом на участке низких частот желаемая ЛАХ проводится параллельно оси абсцисс с ординатой  . В случае, когда статическая ошибка недопустима ( = 0), то скорректированная система должна быть астатической.
. В случае, когда статическая ошибка недопустима ( = 0), то скорректированная система должна быть астатической.
Если в астатической системе с астатизмом первого порядка требуется обеспечить слежение за сигналом  , то ее коэффициент усиления определяется величиной максимально допустимой ошибки по скорости
, то ее коэффициент усиления определяется величиной максимально допустимой ошибки по скорости 
 :
:
 .
.
При этом уравнение низкочастотного участка желаемой ЛАХ:
 .
.
При синтезе следящих систем, входной сигнал которых заранее неизвестная функция времени, обычно указываются только максимально возможные значения скорости  и ускорения
и ускорения  входного сигнала и задаются требованием к величине максимально допустимой динамической ошибке регулирования . В этом случае подбирается эквивалентное гармоническое воздействие
входного сигнала и задаются требованием к величине максимально допустимой динамической ошибке регулирования . В этом случае подбирается эквивалентное гармоническое воздействие  , амплитуда a и частота
, амплитуда a и частота  которого определяется значениями и :
которого определяется значениями и :
 , и
, и  . (2.1)
. (2.1)
При воспроизведении линейной следящей системой эквивалентного гармонического воздействия ошибка регулирования также будет гармонической с той же частотой. Следовательно:
Полагая  , имеем
, имеем
 ,
,
откуда с учетом выражения (2.1):
 ,
,
или, логарифмируя последнее выражение получаем окончательно
 . (2.2)
. (2.2)
Из выражения (2.2) следует, что эквивалентное входное воздействие будет воспроизводиться следящей системой с ошибкой, не превышающей , если при  ордината желаемой ЛАХ будет не менее
ордината желаемой ЛАХ будет не менее
 .
.
Точку К с координатами ( ;
;  ) называют контрольной точкой (рис. 3).
) называют контрольной точкой (рис. 3).
На этом рисунке указаны две прямые, пересекающиеся в точке К, имеющие наклон -20 дБ/дек при  и -40 дБ/дек при
и -40 дБ/дек при  . Уравнения этих прямых получены на основании выражения (2.2) при уменьшении скорости и ускорения входного сигнала по отношению к их максимально возможным значениям. Данные прямые представляют собой границы запретной зоны для желаемой ЛАХ следящей системы с астатизмом первого порядка.
. Уравнения этих прямых получены на основании выражения (2.2) при уменьшении скорости и ускорения входного сигнала по отношению к их максимально возможным значениям. Данные прямые представляют собой границы запретной зоны для желаемой ЛАХ следящей системы с астатизмом первого порядка.

Построение ЛАХ в среднечастотном диапазоне
На среднечастотном участке желаемая ЛАХ в наибольшей степени зависит от требования к динамическим показателям качества регулирования, например, частотному показателю колебательности, времени регулирования и перерегулированию. На этом участке находится частота среза  и определяется запас устойчивости по фазе.
и определяется запас устойчивости по фазе.
Если качество регулирования системы оценивается по величине перерегулирования  и времени регулирования
и времени регулирования  , то, задавшись максимально допустимыми значения указанных показателей и , следует воспользоваться номограммой (рис. 4). По заданной величине перерегулирования (например, = 30 %), определяется величина :
, то, задавшись максимально допустимыми значения указанных показателей и , следует воспользоваться номограммой (рис. 4). По заданной величине перерегулирования (например, = 30 %), определяется величина :
 ,
,
где – частота среза желаемой ЛАХ. (Значению = 30 % на номограмме соответствует Pмакс = 1,28.) Поскольку допустимое значение задано, то можно вычислить необходимую частоту среза:
 .
.


Рисунок 4,6 Номограмма для определения частоты среза и запасов устойчивости по модулю h + и по фазе  желаемой ЛАХ
желаемой ЛАХ
 Вторая номограмма Солодовникова
Вторая номограмма Солодовникова
Вид желаемой ЛАХ в среднечастотном диапазоне должен гарантировать необходимый запас устойчивости системы по фазе, что в максимальной степени обеспечивается, когда в районе частоты среза имеет достаточно протяженный участок с наклоном -20 дБ/дек. Типы четырех возможных ЛАХ, удовлетворяющих этому условию, приведены в таблице 1. ЛАХ типа А и С соответствуют статическим системам, а ЛАХ типа B и D - астатическим системам с астатизмом первого порядка.
Для ЛАХ (рис. 5) примем следующие обозначения:  – протяженность среднечастотного участка ;
– протяженность среднечастотного участка ;  – протяженность участка желаемой ЛАХ, по которому сопрягаются низкочастотный и среднечастотный участки .
– протяженность участка желаемой ЛАХ, по которому сопрягаются низкочастотный и среднечастотный участки .

Имеется несколько рекомендаций по выбору частот  и
и  . Например, выбирают
. Например, выбирают  и
и  . Наиболее простой является рекомендация, согласно которой интервалы частот (
. Наиболее простой является рекомендация, согласно которой интервалы частот ( –
–  ) и (
) и ( –
–  ) принимают равными 0,5…0,9 декады.
) принимают равными 0,5…0,9 декады.
Еще один подход к выбору протяженности среднечастотного участка накладывает ограничение на абсолютную величину  и
и  , которые должны быть не ниже значений, определенных по специальной номограмме (рис. 6), обычно эти значения находятся в пределах от 12 до 16 дБ.
, которые должны быть не ниже значений, определенных по специальной номограмме (рис. 6), обычно эти значения находятся в пределах от 12 до 16 дБ.
Для заданного Pмакс по номограмме находятся необходимые значения запасов устойчивости по модулю h + и по фазе . При этом вначале вычисляется Pмин по формуле
Pмин = 1 – Pмакс.
Проводятся горизонтальные касательные к кривым с индексами Pмакс и Pмин, по которым определяются значения h + и h - в дБ. На рис. 6 для значений Pмакс = 1,28 и Pмин = 0,28 найдены значения h + = 14 дБ и
h - = - 14 дБ. Вертикальная касательная к кривым определяет необходимый запас устойчивости по фазе
 = 400.
= 400.
Значения h + и h - определяют протяженность среднечастотного участка желаемой ЛАХ
= h +, = h -.
На указанном интервале частот фазо-частотная характеристика скорректированной системы не должна заходить в запретную область
 .
.
Выбор граничных частот среднечастотного участка согласно приведенным рекомендациям дает несколько различные результаты. При окончательном их выборе следует исходить из того, что чем шире интервал частот (; ), тем лучше будет переходный процесс. Однако практическая реализация желаемой ЛАХ при этом усложняется и, кроме того, излишняя протяженность среднечастотного участка снижает динамичность системы.
Построение ЛАХ в высокочастотном диапазоне
Вид желаемой ЛАХ в высокочастотном диапазоне определяет, например, такой показатель, как помехоустойчивость системы, но на качество регулирования поведение в этой частотной области влияет в незначительной степени. Поэтому на участке высоких частот с целью упрощения корректирующего звена допустимо совпадение наклонов асимптот желаемой ЛАХ и ЛАХ исходной нескорректированной системы.