Рисунок 69
Проецирующая плоскость будет перпендикулярна к плоскости общего положения, если она перпендикулярна к горизонтали или фронтали плоскости общего положения (рисунок 70).
S ^ p1 Ù S ^ f2a ® S ^ a; b ^ p1 Ù b ^ h1a ® b ^ a.
Из чертежа видно, что отличительной особенностью эпюра, на котором заданы две взаимно перпендикулярные плоскости, из которых одна – фронтально-проецирующая, является перпендикулярность их фронтальных следов f 2a ^ f 0S; горизонтальный след фронтально-проецирующей плоскости перпендикулярен оси Х (hoS ^ х).
Но если одноименные следы двух плоскостей общего положения взаимно перпендикулярны, то сами плоскости не перпендикулярны между собой, так как здесь не соблюдается условие, что одна из плоскостей должна содержать в себе прямую, перпендикулярную к другой плоскости.

Рисунок 70
Вопросы для самопроверки
1. Укажите последовательность графических построений для определения линии пересечения двух плоскостей.
2. Сформулируйте условие параллельности и условие перпендикулярности прямой линии и плоскости.
3. Сформулируйте условие параллельности и условие перпендикулярности двух плоскостей.
4. Какие точки называются конкурирующими? Как ими пользоваться при определении видимости геометрических элементов?
5. Как построить взаимно перпендикулярные плоскости?
6. Перпендикулярны ли плоскости общего положения одна к другой, если их одноименные следы взаимно перпендикулярны?
Способы преобразования чертежа
Целью преобразования чертежа является проведение заданных на эпюре геометрических элементов в новое положение по отношению к плоскостям проекций, более удобное для решения той или иной задачи.
Преобразование чертежа делают для того, чтобы в новой системе плоскостей проекций геометрические образы (отрезок, плоская фигура и т.п.) проецировались на новую плоскость проекций без искажения, в натуральную величину, либо позволяют получить выразительные проекции отдельных элементов. Построение новых дополнительных проекций называют преобразованием чертежа, что можно осуществить двумя способами:
- выведение дополнительных плоскостей проекций с неизменным положением геометрических элементов;
- перемещение геометрических элементов в пространстве с неизменным положением плоскостей проекций.
Так как частных положений у прямой два и у плоскости два, то существуют четыре исходные задачи для преобразования комплексного чертежа:
- прямую общего положения преобразовать в прямую уровня;
- прямую уровня перевести в проецирующее положение;
- плоскость общего положения преобразовать в проецирующее;
проецирующую плоскость перевести в положение плоскости уровня.
В данной работе рассматриваются только три способа преобразования ортогональных проекций, предусмотренные программой: способ перемены плоскостей проекций, вращения и плоскопараллельное перемещение.
7.1 Способ перемены плоскостей проекций
Способ «перемены» заключается в том, что, вводя дополнительные плоскости проекций, они переходят к другой системе плоскостей проекций, при этом геометрические образы в пространстве сохраняют свое положение. Изменяют направления плоскости проекций: при замене обязательно сохраняется взаимная перпендикулярность двух плоскостей проекций.
Пусть задана точка А и система двух взаимно перпендикулярных плоскостей проекций p1 и p2 (рисунок 71). Возьмем плоскость p4 ^ p1 и спроецируем точку А на эту плоскость; проекцией будет А4. Получаем две системы плоскостей проекций: основную p1 и p2 и дополнительную p1 и p4. Положение точки А в пространстве определяем по двум ее проекциям – А2 и А1 в основной системе плоскостей и А1 и А4 – дополнительной. При переходе от одной системы плоскостей проекций к другой аппликата Z1 точки А и ее горизонтальная проекция А1 точки А остаются неизменными (инвариантными) для двух систем.

Рисунок 71
Операция перехода от одной системы плоскостей к другой показана на
эпюре (рисунок 72).

Рисунок 72
Для того чтобы по заданной эпюре точки А (А1, А2) и новой оси проекций х14
построить проекцию этой точки на плоскость p4 (А4), необходимо:
1) из горизонтальной проекции точки А1 опустить перпендикуляр на новую ось проекций х14;
2) от точки А14 на этом перпендикуляре отложить координату z точки А, т. е. А14 А4 = А12А2 = ZA
Таким образом, если точка в пространстве проецируется на новую плоскость проекций, перпендикулярную к одной из оставленных плоскостей проекций, то расстояние новой проекции точки от новой оси равно расстоянию заменяемой проекции от заменяемой оси.
Заметим, что нельзя менять обе плоскости проекций сразу. Новая плоскость проекций должна сохранять перпендикулярность к остающейся плоскости. Поэтому замену плоскостей можно производить только в последовательном порядке: сначала изменить одну плоскость, затем другую, и, если требуется для решения задачи, эту операцию можно повторять неоднократно. Рассмотрим некоторые примеры.
1. Определение длины отрезка АВ общего положения показано на рисунке 73.

Рисунок 73
Для этого, чтобы данная прямая общего положения АВ оказалась линией уровня, следует ввести новую плоскость p4 (p5), которая была бы ей параллельна. На чертеже дополнительная плоскость p4 параллельна прямой АВ и перпендикулярна к плоскости p1 (ось Х14 p1/p4 параллельна проекции А1В1). Через точки А1 и В1 проводим новые линии связи, перпендикулярные оси Х14. Расстояние от оси Х14 до А4 и В4 равно расстояниям от А2 и В2 до оси Х12. Образовавшейся системе плоскостей проекций p1/p4 прямая АВ (А4В4) является линией уровня, т.е. натуральной величиной отрезка АВ.
Аналогичным построением можно данную прямую АВ преобразовать в горизонталь. Для этого оставим на месте p2 и заменим p1 на p5. Дополнительная плоскость p5 параллельна прямой АВ и перпендикулярна к плоскости p2. Теперь прямая А5В5 является линией уровня в системе p2/p5, т.е. натуральной величиной отрезка АВ.
2. Приведение отрезка прямой общего положения в проецирующую прямую.
На рисунке 74 показан перевод отрезка СД прямой общего положения в положение С5Д5 отрезка фронтально-проецирующей прямой.

Рисунок 74
Вначале заменой плоскости p2 плоскостью p4 переводим отрезок СД в положение параллельное плоскости p4, затем, заменив плоскость p4 плоскостью p5, поставим отрезок СД по отношению к плоскости p5 в проецирующее положение, и тогда ее проекция на плоскости p5 сольется в точку С5 º D5, при этом С45С5 = С14С2 (или D45D5 = D14D2).
3. Чтобы плоскость общего положения преобразовать в проецирующую, необходимо в этой плоскости выбрать одну из главных линий – горизонталь или фронталь, каждая из которых и определяет направление дополнительной плоскости проекций. Если горизонталь плоскости является направлением дополнительной плоскости проекций, то плоскость, перпендикулярная этой плоскости проекций, занимает также относительно ее положение проецирующей плоскости.
Рассмотрим пример преобразования плоскости общего положения a, заданной треугольником АВС, в плоскость проецирующую (рисунок 75).Через вершину А проводим горизонталь. На чертеже горизонтальная проекция А111 горизонтали А1 определяет направление проекции на дополнительную плоскость проекций. Выбираем дополнительную плоскость проекций p4 перпендикулярно горизонтали А1 плоскости АВС (p4 ^ p1, p4 ^ АВС, Х14 ^ h 1) и соответственно перпендикулярно плоскости p1, и с помощью точек А и С построена проекция плоскости - А4В4С4 – прямая.

Рисунок 75
Очевидно, в образовавшейся системе плоскостей проекций p1/p4 плоскость АВС является проецирующей. Заметим, что горизонталь проецируется на плоскости p4 в виде точки.
4. Определить истинную величину фигуры. Если заданные на чертеже плоские фигуры – плоскости общего положения, для определения их истинной величины недостаточно замены одной плоскости. Новая плоскость проекций должна быть параллельна данной фигуре. В таких случаях необходимо заменить плоскости проекций дважды. Основной принцип замены плоскостей проекций и правила построения проекций точек при этом остаются прежними.
Например, необходимо определить истинную величину треугольника АВС, являющегося плоскостью общего положения (рисунок76).

Рисунок 76
Задача решается двумя последовательными заменами плоскостей проекций. Заменой фронтальной плоскости проекций (p2) некоторой дополнительной плоскостью проекций (p4) в образовавшейся системе p1/p4
(p4 ^ p1, p4 ^ АВС и Х14 ^ h 1) плоскость АВС (А4В4С4) будет проецирующей. Затем вводится дополнительная плоскость p5 (p5 ^ p4, p4 | | АВС,
Х45 | | А4В4С4). Спроецировав треугольник АВС на плоскость p5, мы получим, очевидно, его истинную фигуру (А5В5С5).
7.2 Преобразование проекций способом вращения
Сущность способа заключается в том, что при неизменном положении основных плоскостей проекций изменяется положение заданных геометрических элементов относительно плоскостей проекций путем их вращения вокруг некоторой оси до тех пор, пока эти элементы не займут частное положение в исходной системе плоскостей проекций. В качестве осей вращения удобнее всего выбрать проецирующие прямые или прямые уровня, тогда точки будут вращаться в плоскостях, параллельных или перпендикулярных плоскостям проекций.
Данный способ широко используется в технике при рассмотрении и исследовании различных вращающихся форм конструкций механизмов и машин.
7.2.1 Вращение вокруг проецирующих прямых линий
Вращением предмета можно построить множество чертежей данного предмета в одной системе плоскостей проекций. При этом основные плоскости проекций остаются неизменными.
Рассмотрим на комплексном чертеже вращение точки вокруг оси, перпендикулярной плоскости проекций. Пусть точка А (рисунок 77) вращается вокруг горизонтально проецирующей прямой j (j^ p1). Траекторией движения точки А является окружность с центром О на оси вращения в плоскости S, перпендикулярной к оси вращения. Эта плоскость (S) параллельна горизонтальной плоскости проекций, поэтому радиус вращения R = О1А1 точки А проецируется на p1 без искажения, ее горизонтальная проекция А1 перемещается по окружности (с центром в точке О1) радиусом ОА. Фронтальная проекция точки А2 при этом перемещается по прямой, параллельной оси Х.
В качестве примера рассмотрим, как осуществляется перемещение отрезка общего положения в частное положение путем вращения вокруг оси, перпендикулярной плоскости проекций.
Преобразование прямой линии общего положения в линию уровня можно осуществить вращением вокруг оси, перпендикулярной как к плоскости 
Рисунок 77
p1, так и к плоскости p2. На рисунке 78, а отрезок прямой АВ преобразован вращением во фронтальный отрезок A2’B2’. 
а) б)
Рисунок 78
Ось вращения i ^ p1 и проходит через точку В. Чтобы осуществить такое перемещение, достаточно повернуть АВ вокруг оси i ^ p1 на угол jo так, чтобы после поворота A1’B1’ занял положение параллельное оси Х. Так как точка В принадлежит оси вращения i, то она не будет менять своего положения в процессе преобразования. В1 º В, следовательно, В1’ º В1 и В2 º В2’. Для нахождения фронтальной проекции точки А2’ необходимо из А1’ восстановить перпендикуляр к оси Х и отметить точку его пересечения с горизонтальной прямой, проведенной из точки А2. Отрезок A2’B2’ будет натуральной величиной отрезка АВ.
Преобразование прямой общего положения в проецирующую прямую путем вращения вокруг одной проецирующей оси невозможно. Но зато в проецирующую можно сразу преобразовать прямую уровня. Чтобы преобразовать прямую линию общего положения в проецирующую, требуется произвести последовательно два вращения: первое, преобразуем данную прямую в линию уровня, второе, преобразуем полученную прямую уровня в проецирующую прямую. На рисунке 78, б отрезок СД прямой общего положения переведен в положение, перпендикулярное плоскости p2.
Отрезок СД вначале вращением вокруг оси i ^ p1 переведем в положение, параллельное горизонтальной плоскости проекций (С2’Д2’ | | X), затем вращением вокруг i’^ П1, C1’Д1’ переместим во фронтально-проецирующее положение C1’’Д1’’ ^ Х..
Для того чтобы повернуть плоскость на определенный угол в заданном направлении, необходимо повернуть три любые точки плоскости вокруг одной и той же оси, на один и тот же угол в заданном направлении.
Рассмотрим на примере.
Определить натуральную величину плоскости общего положения a(АВС). Известно, что плоская фигура проецируется в натуральную величину, если она параллельна плоскости проекций. Если плоскость a(АВС) общего положения, то одним поворотом задачу решить невозможно, т.е. необходимо провести два последовательных вращения: первое – повернуть до положения проецирующей плоскости, второе – до положения плоскости уровня. На рисунке 79 в плоскости a(АВС) проведена горизонталь h (h 1 Ù h 2). Ось вращения i ^ p1 Ù С1 É i1.
Поворачиваем плоскость a(АВС) до положения перпендикулярности горизонтали к плоскости p2 (h 1’ ^ p 2), горизонтальная проекция плоскости сохраняет свой вид и величину (А1В1С1 = А1’В1’С1’), изменяется лишь ее положение. Так как точки А, В, С при таком повороте перемещаются в плоскостях, параллельных плоскости p1, то проекции А2’, В2’ находятся на горизонтальных линиях связи А2А2’ и B2B2’. В результате плоскость a(АВС) становится фронтально-проецирующей плоскостью и точки А2’, В2’ и С2 лежат на одной прямой.
При втором повороте, приводящем плоскость a(АВС) в параллельное плоскости p1 положение, подразумевается ось вращения, перпендикулярная к плоскости p2 (i’^ p2, В2’ É i2’). Поворачиваем проекцию А2’, С2’ до положения параллельного плоскости p2. Теперь фронтальная проекция при повороте сохраняет свой вид и величину, полученные во второй стадии поворота,

Рисунок 79
точки А1’, C1 перемещаются в плоскостях, параллельных плоскости p2, проекции C1’’ и A1’’ находятся на горизонтальных линиях связи с точками C1’A1’. Построив проекцию A1’’B1’C1’’, получаем натуральную величину плоскости a(АВС).
7.2.2 Вращение вокруг линий уровня
Вращение плоскости можно осуществить, принимая за ось вращения одну из ее горизонталей или фронталей. Около этой оси будут вращаться все точки, принадлежащие плоскости. Каждая точка опишет в пространстве окружность, плоскость которой будет перпендикулярной к оси вращения. При этом, если точка будет вращаться около горизонтали, то окружность проецируется на плоскость p1 в виде прямой, перпендикулярной к горизонтальной проекции горизонтали. В случае вращения точки около фронтали окружность вращения проецируется на плоскость p2 в виде прямой, перпендикулярной к фронтальной проекции фронтали.
Рассмотрим на примере, определить величину угла ВАС (рисунок 80).
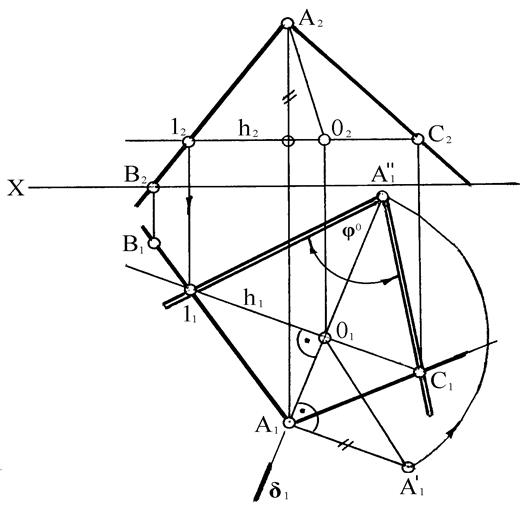
Рисунок 80
Здесь для определения величины угла применен поворот вокруг горизонтали: плоскость угла расположится параллельно плоскости p1. Плоскость однозначно определяется также тремя точками 1, А и С, так как точки С и 1 принадлежат горизонтали, которая принята за ось вращения, то они не меняют своего положения в процессе преобразования. Поэтому, чтобы задать новое положение плоскости (ВАС) | | p1, достаточно осуществить поворот только одной точки А.
Построения выполнены в следующей последовательности:
а) через точку С проводим горизонталь h (C1), h 2(C212) и h 1(C111);
б) проведена плоскость вращения точки А – горизонтально проецирующая плоскость d, перпендикулярная к горизонтали (т.е. к оси вращения);
в) определяем центр вращения (О1, О2) точки А в пересечении горизонтали с плоскостью d;
г) определяем величину радиуса вращения как гипотенузу прямоугольного треугольника О1 A1А1’, у которого катет А1А1’= |Z(.)A-Z(.)O|;
д) из центра О1 проведена дуга окружности радиуса О1А1’, точка пересечения которой с прямой О1А1 укажет положение А1’’- горизонтальная проекция вершины угла после его поворота вокруг горизонтали, и построен угол 11А1’’C1, равный искомому.
Рассмотрим графические построения для определения натуральной величины треугольника АВС вращением его вокруг горизонтали (рисунок 81), проходящей через вершину С треугольника.
Вершины А и В треугольника вращаются вокруг оси h по окружностям; вершина С принадлежит оси вращения и не изменяет своего положения. Центром вращения точки В является точка О пересечения горизонтали h (оси вращения) с горизонтально проецирующей плоскостью d точки В, перпендикулярной этой оси. Теперь необходимо определить натуральную величину радиуса вращения точки В – отрезок ОВ можно определить построением прямоугольного треугольника – О1В1В1’, гипотенуза его равна радиусу вращения точки В, от центра О вращения точки В по направлению следа d, плоскости ее движения откладываем длину радиуса вращения и отмечаем проекцию В1’’ точки В, смещенной до плоскости уровня. Другая точка проходит через найденную точку В1’’ и точку 11 из условия, что точка А принадлежит прямой В1 и плоскости d движения этой точки. Проекция А1’B1’’C1 конгруэнтна треугольнику АВС, так как после поворота плоскость треугольника стала параллельной плоскости p1. Фронтальная же проекция треугольника совпадет с фронтальной проекцией горизонтали, т. е. представляет собой прямую линию (на чертеже она не показана).
Если требуется повернуть плоскую фигуру до положения, параллельного плоскости p2 , за ось вращения надо выбрать фронталь (все остальные построения аналогичны).

Рисунок 81
7.3 Плоскопараллельное перемещение
Под плоскопараллельным перемещением понимают такое преобразование фигур, когда все их точки, не меняя взаимного расположения, изменяют его относительно неподвижных плоскостей проекций. При плоскопараллельном перемещении все точки фигуры перемещаются в параллельных плоскостях. Обычно это плоскости уровня или проецирующие плоскости. Линии, по которым перемещаются точки, называются их траекториями, это плоские кривые.
При плоскопараллельном перемещении геометрического образа одна из его проекций, оставаясь равной самой себе, перемещается в плоскости проекций, другие проекции точек геометрического образа перемещаются по прямым, параллельным направлению оси проекций. На рисунке 82 показано применение способа плоскопараллельного перемещения к определению натуральной величины треугольника АВС произвольного положения.

Рисунок 82
Такая задача решается двумя последовательными перемещениями. Первым перемещением треугольника АВС переводится в положение, перпендикулярное горизонтальной плоскости проекций. Для этого намечаем в плоскости треугольника фронталь f (C1). Проекцию f2 (C212) перемещаем в положение C2’12’ так, чтобы она совпала с направлением проецирования. В этом случае фронталь плоскости АВС перпендикулярна горизонтальной плоскости проекций, а треугольник АВС представляется в горизонтально проецирующей плоскости. Горизонтальная проекция A1’B1’C1’ треугольника проецируется в отрезок прямой.
Вторым перемещением треугольник располагают параллельно фронтальной плоскости проекций. В этом случае горизонтальная проекция A1’B1’C1’ приводится в положение A1’’B1’’C1’’, параллельное направлению оси проекций, а фронтальная проекция A2’’B2’’C2’’ представляет собой треугольник АВС в натуральную величину.
Из рассмотренного примера следует, что плоскопараллельное перемещение можно рассматривать как вращательное без указания осей, т.е. вращательное перемещение вокруг не выявленных проецирующих прямых.
При параллельном перемещении геометрического образа одна из его проекций, оставаясь равной самой себе, перемещается в плоскости чертежа,
другие проекции точек геометрического образа перемещаются по прямым, параллельным направлению оси проекций.
Вопросы для самопроверки
1. Перечислите способы преобразования чертежей геометрических образов.
2.Зачем необходимо преобразование комплексного чертежа?
3. В чем заключается основное различие способов преобразования чертежа?
4. В чем сущность способа замены плоскостей проекций?
5. Как надо расположить новые плоскости проекций, чтобы отрезок прямой общего положения проецировался в натуральную величину, в точку?
6. Как нужно расположить новую плоскость проекции, чтобы плоскость общего положения стала проецирующей?
7. При каком расположении плоской фигуры можно определить ее истинную величину путем замены только одной плоскости проекций?
8. В чем заключается способ вращения?
9. Какие линии используются в качестве линий вращения?
10. Как изменяется фронтальная проекция предмета при вращении его вокруг фронтально проецирующей прямой?
11. Что такое радиус вращения точки?
12. Какую прямую линию принимают за ось вращения при переводе отсека плоскости из общего положения в горизонтально проецирующую плоскость?
13. Какое название встречается для вращения без изображения оси?
14. Укажите последовательность приемов определения натуральной величины отсека плоскости способом плоскопараллельного перемещения?
8 Метрические задачи
Метрическими принято считать задачи, решение которых связано с определением на комплексном чертеже истинных величин расстояний, углов и плоских фигур. В большинстве метрических задач участвуют прямые и плоскости. Следовательно, если заранее будет известно, какие построения необходимо выполнить, чтобы прямая или плоскость общего положения заняла частное положение, то это значительно облегчит решение метрических задач.
Все многообразие метрических задач можно свести к следующим группам:
- задачи на определение расстояния между двумя точками;
- задачи на нахождение величины угла между двумя пересекающимися прямыми;
- задачи на определение истинной величины плоской фигуры.
Первая группа задач включает в себя определение расстояний от точки до другой точки, до прямой, до плоскости, до поверхности; от прямой до другой прямой, плоскости; от плоскости до плоскости.
Вторая группа задач включает в себя определение углов между пересекающимися или скрещивающимися прямыми, между прямой и плоскостью, между плоскостями (определение величины двугранного угла).
Алгоритм решения всех метрических задач опирается на два инварианта ортогонального проецирования:
а) теорему (прямую и обратную) о проецировании прямого угла. Напомним ее: если одна сторона прямого угла параллельна плоскости проекций, то при ортогональном проецировании прямой угол проецируется на эту плоскость в прямой угол (АВС = 90o) Ù ([ВС) // p1, ([ВА ^ p1) Þ А¢В¢С¢// 90o;
б) свойство любой плоской фигуры проецироваться без искажения, в конгруэнтную фигуру, на ту плоскость проекций, которая параллельна этой фигуре, т. е. (Ф Ì b) Ù (b // p¢) Þ Ф¢ @ Ф.
Рассмотрим решение искомых из перечисленных задач.
8.1 Определение расстояний
Задачи на определение расстояний между геометрическими образами в конечном счете сводятся к нахождению расстояния между двумя точками. При решении метрических задач широко используют преобразования исходного чертежа.
При этом под преобразованием чертежа понимают построения на чертеже, отображающие изменения положения геометрических образов или плоскостей проекций в пространстве и приводящие к образованию нового поля проекций.
1. Расстояние от точки до точки определяется длиной отрезка прямой, соединяющей эти точки. Отрезок прямой линии проецируется в натуральную величину на параллельную ему плоскость проекций. Натуральная величина отрезка может быть получена различными способами:
- способом прямоугольного треугольника;
- способом вращения;
- способом перемены (замены) плоскостей проекций.
На рисунке 83 приведены примеры определения натуральной величины

а) б) в)
Рисунок 83
отрезка ½АВ½ способом проецирования его на дополнительную плоскость проекций, параллельную отрезку½АВ½. На рисунке 83, а использован способ прямоугольного треугольника, когда дополнительная плоскость p¢ É ½ АВ½ и недостающая координата одного конца отрезка – точки А или В равна нулю. На рисунке 83, б – способом вращения отрезка ½АВ½ вокруг проецирующей прямой – оси i или j: i É А, i ^ p1 или j É А, i ^ p2. На рисунке 83, в использован способ перемены плоскостей проекций: p4 // ½АВ½, p4^ p1 или p5 // ½АВ½, p5 ^ p2.
2. Расстояние от точки до прямой измеряется отрезком перпендикуляра, проведенного из точки к данной прямой. Отрезок этого перпендикуляра изображается в натуральную величину на плоскости в том случае, если он проведен к проецирующей прямой. Значит, нужно преобразовать чертеж данной прямой, сделав его в новой системе плоскостей проекций, проецирующей. На рисунке 84 определено расстояние от точки С до прямой АВ:
а) p2 ^ p1 ® p1 ^ p4; p4 || AB; X14 || A1B1;
б) p1 ^ p4 ® p 4 ^ p5; p5 ^ АВ; Х45 || A4B4;
в) С5К5 – истинное расстояние от точки С до прямой АВ.

Рисунок 84
Чтобы построить проекции перпендикуляра СК в исходной системе плоскостей, строим основание перпендикуляра – точку К на прямой АВ из условия, что в системе p4 ^ p5 он занимает положение уровня, т.е.
С4К4 ^ А4В4. Горизонтальная и фронтальная проекция точки К определяется по линиям связи из условия принадлежности ее прямой АВ.
3.Расстояние между двумя параллельными прямыми измеряется отрезком перпендикуляра между ними. На рисунке 85 определено расстояние между прямыми АВ и СД путем преобразования чертежа прямых.

Рисунок 85
Сначала построено изображение прямых линий на плоскости p4 ^ p1. В этой системе плоскостей прямые линии занимают положение линий уровня:
АВ (СД) || p4; Х14 || А1В1(С1Д1).
В системе плоскостей p4 ^ p5 прямые линии занимают проецирующее положение по отношению к плоскости П5:
p5 ^ АВ(СД);
Х4 5 ^ А4В4(С4Д4).
Отрезок М5К5 между вырожденными проекциями прямых определяет истинную величину расстояния между прямыми АВ и СД.
4. Для определения расстояния между скрещивающимися прямыми линиями необходимо одну из прямых сделать проецирующей в новой системе плоскостей проекций. На рисунке 86 приведено решение задачи на определение расстояния между скрещивающимися прямыми АВ и СД. Решение выполняется в следующей последовательности:
а) p2 ^ p1 ® p1 ^ p4; p4 || AB; Х14 || А1В1;
б) p1^p4 ® p4 ^ p5; p5 ^АВ; Х45 || А4В4;
в) М5К5 – кратчайшее расстояние между скрещивающимися прямыми.

Рисунок 86
5. Расстояние от точки до плоскости измеряется отрезком перпендикуляра, опущенного из точки на плоскость. Так как перпендикуляр к проеци-
рующей плоскости есть линия уровня, то удобно иметь на чертеже «вырожденную» проекцию данной плоскости. На рисунке 87 построены проекции перпендикуляра ДК, отрезок которого определяет расстояние от точки Д до плоскости a(АВС): p1 ^ p2 ® p1 ^ p4; p4 ^ a; Х14 ^ h 1; h (А,1) Î a.
а) Д4К4 ^ a4 – истинная величина расстояния от точки Д до плоскости a (АВС);
б) К2 построена с помощью высоты точки К, измеренной на плоскости p4.

Рисунок 87
6. Расстояние между прямой и параллельной ей плоскостью измеряется отрезком перпендикуляра, опущенного из любой точки прямой на плоскость. Значит, достаточно плоскость общего положения преобразовать в положение проецирующей плоскости, взять на прямой линии точку, и решение задачи будет сведено к определению расстояния от точки до плоскости.
7. Расстояние между параллельными плоскостями измеряется отрезком перпендикуляра между ними, который легко строится, если плоскости займут проецирующее положение в новой системе плоскостей проекций.
На рисунке 88 показано определение расстояния между параллельными плоскостями (a (АВС) // b (f Ç h)) способом замены плоскостей проекций. Для этого выбирается новая плоскость проекций p4 ^ a Ù b (х14 ^ h1 и х14 ^ hоb). На плоскость p4 заданные плоскости проецируются в прямые. Искомое расстояние – l.

Рисунок 88
8.2 Определение углов
Следующая группа задач включает в себя определение углов между пе-
ресекающимися и скрещивающимися прямыми линиями, между прямой и плоскостью, между плоскостями (определение величины двугранного угла).
1. Для определения величины угла наклона прямой к одной из плоскостей проекций следует заменить вторую плоскость проекций, расположив новую плоскость параллельно прямой; на этой плоскости угол проецируется в натуральную величину. Если прямая линия параллельна плоскости p2, то угол между этой прямой и плоскостью p1 изображается без искажения на фронтальной проекции. Если же прямая линия параллельна плоскости p1, то образуемый этой прямой угол с плоскостью p2 изображается без искажения на горизонтальной проекции.
2. Угол между пересекающимися прямыми линиями можно определить одним из следующих способов:
- заключением угла в треугольник; следует пересечь стороны угла произвольной прямой и определить натуральную величину полученного треугольника, откуда определяем натуральную величину заданного угла;
- вращением; необходимо поставить плоскость угла в положение, параллельное какой-либо плоскости проекций;
- переменой (заменой) плоскостей проекций; нужно изменить плоскости проекций так, чтобы одна из них стала параллельной плоскости заданного угла.
Наиболее просто и быстро приводит к этой цели способ вращения около горизонтали или фронтали; необходимо совместить заданный угол с плоскостью параллельной горизонтальной (фронтальной) плоскости проекций, проходящей через произвольную горизонталь (фронталь) плоскости угла.
На рисунке 89 истинная величина угла между двумя пересекающимися прямыми определена способом вращения вокруг горизонтали.
В2

Рисунок 89
Через точку А (А1, А2) проведена горизонталь h (h1, h2), принадлежащая плоскости угла АВС и принята за ось вращения i. Вокруг этой оси выполнен поворот треугольника АВ1 до положения, параллельного горизонтальной плоскости проекций p1 (А1В1С1 // p1). Точки А и 1 расположены на оси вращения, поэтому в процессе вращения своего положения в пространстве не меняют (А º А¢, 1 º1¢), а точка В описывает окружность, плоскость которой проецируется на p1 в виде прямой, перпендикулярной проекции оси вращения (В1В1¢^ h1). В новом положении треугольника АВ1 радиус вращения точки В проецируется на p1 без искажения R= О1В1¢. Радиус вращения точки В определен способом построения прямоугольного треугольника ВоВ1О1.
После поворота плоскость треугольника заняла положение, параллельное плоскости проекций p1 (А1В¢1С1 // p1), и проецируется на эту плоскость без искажения ÐА¢1В¢1¢1 = ÐАВ1 = a o.
На рисунке 90 показано решение этой задачи способом двукратной замены плоскостей проекций.

Рисунок 90
Сначала плоскость угла АВС преобразуется в проецирующую
АВС ^ p4 плоскости угла АВС (p5 // АВС, Х45 // А4В4С4). На эту плоскость проекций (p5) угол АВС проецируется без искажения ÐА5В5С5 @ ÐАВС = a o.
3. Угол между двумя скрещивающимися прямыми называется плоский угол, который образуется между двумя прямыми, проведенными из произвольной точки пространства параллельно данным скрещивающимися прямым. На рисунке 91 показан пример решения по определению угла между двумя скрещивающимися прямыми.
Сначала выбирается произвольная точка N. Затем через эту точку проводятся две прямые a и b, параллельные двум заданным скрещивающимся прямым АВ и СD (а // АВ и d // СD. а 1// А1В1. а 2 // А2В2. b 1 // С1D1. b 2 // С2D2). Угол между пересекающимися прямыми линиями a и b ( точк а N – точка их пересечения) определяется любым известным способом преобразования ортогональных проекций. На рисунке 91 показано определение этого угла способом вращения вокруг фронтали.

Рисунок 91
4.Угол между прямой АВ и плоскостью а называют угол j o между этой прямой и ее ортогональной проекцией на эту плоскость (т. е. угол ВАВ¢, рисунок 92). На рисунке прямая АВ сос