Таблица 2.1.
Характеристика и требования к САУ с модальным управлением
| № варианта | Приве-дённый момент инерции | Максимальная скорость исполнительной оси | Доброт-ность, (не менее) | Перерегу-лирование,%, (не более) | Время переходных процессов, с, (не более) |
| 0,1Jд | 1,0 | 0,5 | |||
| 0,5Jд | 1,5 | 0,3 | |||
| Jд | 2,0 | 0,5 | |||
| 2Jд | 2,5 | 0,4 | |||
| 5Jд | 3,0 | 0,3 |
Типы электродвигателей
 ;
;  ;
;  ;
;  ;
;  .
.
Базовые параметры САУ определяются на основании варианта технического задания на проектирование (табл. 2.1), определяемого преподавателем.
Одним из способов формирования рациональных структур систем электропривода является введение линейной обратной связи по состоянию, т.е. применение модального управления. Применение модального регулятора имеет ряд преимуществ: задавая желаемый полином в форме Баттерворта, мы имеем переходный процесс с незначительным перерегулированием, а, задавая характеристический полином в форме биноминального распределения, получаем монотонный характер переходного процесса. Кроме того, задавая среднегеометрический корень wO в выбранном полиноме, мы можем обеспечить желаемое быстродействие системы (т.е. время переходного процесса).
2.1. Построение функциональной схемы САУ
Функциональная схема САУ позволяет определить основные функциональные связи между звеньями системы. Пример базовой следящей схемы СЭП с модальным регулятором приведен на рис. 2.1, где введены следующие обозначения: РП– регулятор положения; ДС; ДТ – датчики скорости и тока якоря; ДР – датчик рассогласования; ТП – тиристорный преобразователь; Д – электродвигатель; Р – редуктор; М – механизм; qЗ, qО – углы задания и отработки.

Рис. 2.1. Функциональная схема САУ с модальным регулятором
2.2. Построение структурной динамической схемы и синтез модального регулятора
Структурная схема исследуемой системы с модальным регулятором представлена на рис. 2.2.
Для обеспечения астатизма по возмущающему воздействию в систему введена отрицательная обратная связь по положению и И–регулятор положения. Тогда передаточная функция замкнутой системы, полученная при свертке по теореме Мэйсона, примет вид
 (2.5)
(2.5)
где



 .
.
При этом характеристический полином будет

 . (2.6)
. (2.6)
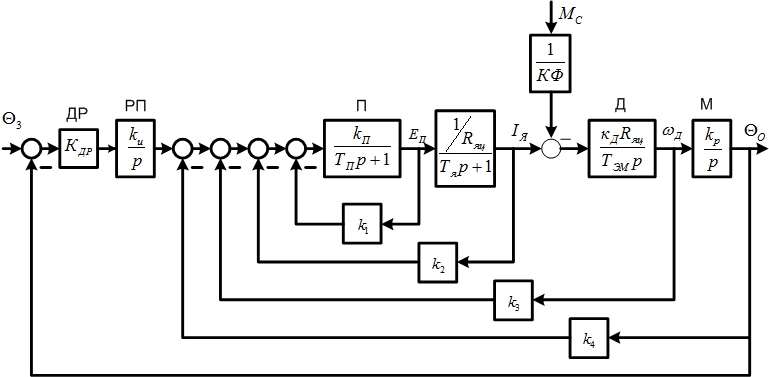
Рис. 2.2. Структурная динамическая схема САУ
Таким образом, получаем систему пятого порядка. Желаемые характеристические полиномы с биноминальным распределением корней и в форме Баттерворта имеют вид соответственно [7]:
 ; (2.7)
; (2.7)
 ,(2.8)
,(2.8)
где w0 – среднегеометрический корень.
Тогда коэффициенты обратных связей и коэффициент усиления И–регулятора можно определить по следующим формулам для случая биноминального распределения:
 ; (2.9)
; (2.9)
 ; (2.10)
; (2.10)
 ; (2.11)
; (2.11)
 ; (2.12)
; (2.12)
 ; (2.13)
; (2.13)
а в случае стандартной формы Баттерворта:
 ; (2.14)
; (2.14)
 ; (2.15)
; (2.15)
 ; (2.16)
; (2.16)
 ; (2.17)
; (2.17)
 . (2.18)
. (2.18)
При применении стандартной формы Баттерворта корни характеристического уравнения расположены на комплексной плоскости по окружности; при этом вещественные и мнимые части их можно найти по формуле
 (i = 1, …,5)
(i = 1, …,5)
где  (2.19)
(2.19)
Для обеспечения степени устойчивости  значение
значение  вычисляется из неравенства
вычисляется из неравенства
 . (2.20)
. (2.20)
При синтезе модального регулятора встает вопрос о выборе значения . Это можно сделать, если применить оценку времени переходного процесса как
 ; (2.21)
; (2.21)
тогда
 . (2.22)
. (2.22)
Получаем для биноминальной формы
 ;
;
соответственно для формы Баттерворта
 .
.
2.3.Построение логарифмических частотных характеристик САУ
После расчета коэффициентов обратных связей и коэффициента передачи И-регулятора положения необходимо построить логарифмические амплитудную Wp(w) и фазовую jр(w) характеристики разомкнутой системы. Структурная динамическая схема скорректированной системы со свернутыми внутренними контурами представлена на рис. 2.3, где введены следующие обозначения:



Рис. 2.3. Структурная динамическая схема разомкнутой САУ
Построение ЛЧХ разомкнутой системы удобно выполнить на ЭВМ в СИАМ или Matlab-Simulink. По полученным ЛЧХ оценивается быстродействие САУ (длительность переходного процесса) и запас устойчивости (колебательность переходного процесса), а также добротность САУ D.
Если полученные характеристики САУ не удовлетворяют заданным требованиям к динамике системы, следует откорректировать их и уточнить настройки регуляторов.