Общие сведения. Электропривод состоит из механизмов передвижения и подъема. Кран используется для погрузки тяжеловесных грузов. В обоих механизмах используются асинхронные электродвигатели с фазным ротором.
Механизм передвижения управляется посредством регулирования тиристорами подводимого к статору двигателя напряжения в функции разности между заданной и действительной скоростями передвижения крана.
Механизм подъема управляется путем создания искусственного тормозного момента специальным тормозом вихревых токов, действие которого регулируется тиристорным мостом.
Система управления передвижением крана. Данная система выполнена по принципу регулирования подводимым напряжением частоты вращения исполнительного двигателя. В цепь фазного ротора включен дополнительный резистор.
В каждую фазу двигателя напряжение сети подается через мостик из двух тиристоров либо тиристора и диода. Все тиристоры защищены цепочками RC.
Система обеспечивает плавный диапазон регулирования от 3 до 100 % синхронной скорости при статической ошибке, не превышающей 1 %, и динамической ошибке 2 %.

Основными компонентами системы (рис. 1) являются силовой тиристорный блок, выходной триггерный блок U2, формирующий управляющие импульсы на тиристоры, блок управления U1 и датчик заданного значения скорости U3. Кроме того, имеются тахогенератор и датчик тока двигателя.
Датчик заданного значения скорости представляет собой механически связанный с рукояткой контроллера потенциометр и усилитель сигнала, снимаемого с этого потенциометра. В случае ступенчатого управления сигналы на вход усилителя поступают не через потенциометр, а непосредственно через контакты контроллера.
Система работает по следующему принципу. В соответствии с перемещением командоконтроллера в датчике заданного значения скорости двигателя U3 вырабатывается напряжение определенного значения и полярности. Это напряжение через блок ограничения уровня и скорости нарастания задающего сигнала – блок С – подается в блок усилителя скорости – блок D. В этот же блок поступает от тахогенератора сигнал, пропорциональный действительной скорости вала двигателя. В зависимости от разности между заданным и действительным значением скорости на выходе данного усилителя появляется сигнал определенной полярности и уровня. Этот сигнал поступает в блок Е усилителя тока, где алгебраически складывается с сигналом, пропорциональным току нагрузки двигателя. В результате вырабатывается управляющее напряжение в блоках F и G синхронизации тиристоров.
В блоке синхронизации вырабатываются сигналы включения питания импульсных трансформаторов триггерного блока, формирующего отпирающие импульсы на тиристоры.
Система работает таким образом, что при большой разности между заданным и действительным значением частоты вращения вала двигателя тиристоры открываются раньше, и среднее значение подводимого к двигателю напряжения увеличивается.
Управление движением вперед или назад, а также тормозом осуществляется блоком логики Н с выходом на катушки соответствующих контакторов. В блоке логики сравниваются заданное направление вращения с действительным, представленным полярностью напряжения тахогенератора, и выдаются сигналы на контакторы направления.
Кроме того, блок логики выдает сигнал «1», блокирующий включение тиристоров при остановке двигателя и при переключении контакторов во время реверса.
Блок защиты I отключает двигатель от сети при несимметричной нагрузке фаз, исчезновений напряжения питания регулятора и несовпадении напряжения питания регулятора и несовпадения направления вращения двигателя с заданным.
Действие блока защиты запрещается при нормальном реверсе нулевым сигналом «К» из блока логики.
Блок L в зависимости от состояния контактов, подключенных к его входам, выдает или снимает сигнал с соответствующих выходов (напряжение 12 В).
Блок М представляет собой релейный блок, являющийся выходным каскадом блока логики Н.
Более подробные сведения содержаться в описании блоков системы.
Работа основных электронных блоков системы управления передвижением. На блок синхронизации КАЕ14 (F, G) с трансформатора подаются сдвинутые на 120° напряжения синхронизации амплитудной 165 В (выводы 16, 20, 22 и 1, 2, 3), а также управляющее напряжение с выхода усилителя тока (блок Е).
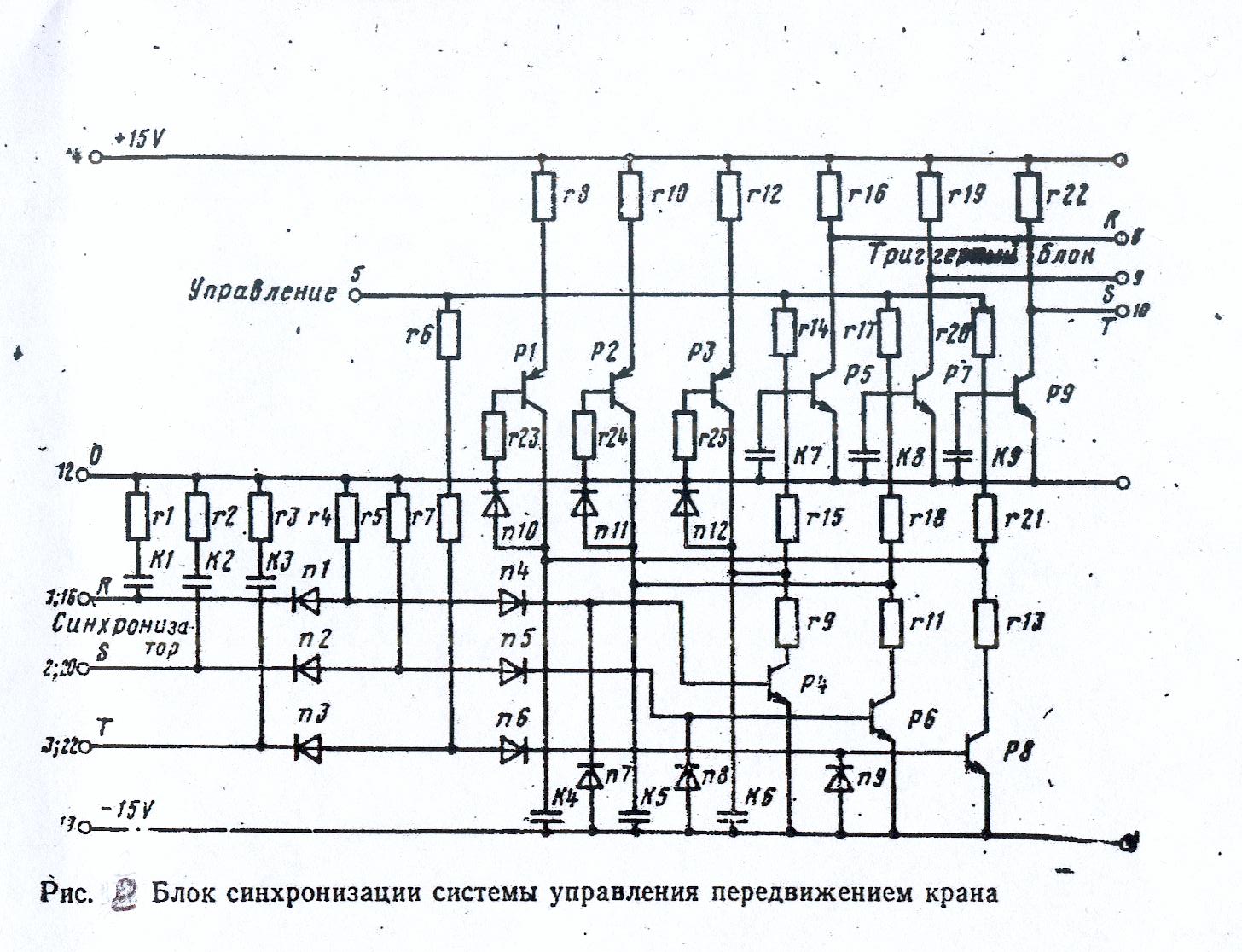
В блоке (рис. 2) происходит формирование для каждой фазы пилообразного напряжения, сравнение его с напряжением управления и выдача разрешающего сигнала в триггерный блок на запуск управляющих импульсов на тиристоры.
Выходные сигналы снимаются с выводов 8, 9, 10. Высокий уровень выходного сигнала (выше 4 В) является запрещающим для включения тиристоров. Генераторы пилообразных напряжений собраны на конденсаторах К4, К5, К6 и транзисторах Р4, Р6, Р8. Заряд этих конденсаторов производиться через транзисторы Р1, Р2, Р3, обеспечивающие стабильную силу тока заряда и, таким образом, линейный закон увеличения напряжения на обкладках конденсаторов.
Разряд конденсаторов происходит через малые коллекторные резисторы r9, r11, r13 при открытии транзисторов Р4, Р6, Р8. Разрядный транзистор открывается, когда соответствующее напряжение синхронизации становиться больше (более положительным),чем -15 В.
При этом следует иметь ввиду, что после открытия разрядного транзистора потенциал на обеих обкладках конденсатора составляет -15 В. При закрытии этого транзистора по мере заряда конденсатора потенциал его верхней (по схеме) обкладки повышается от -15 до 0 В.
Потенциал базы выходных транзисторов Р5, Р7, Р9 относительно эмиттера представляет собой разницу между входным напряжением управления (вывод 5) и падением напряжения на базовом резисторе, включенном между базой и зажимом 5. Поскольку это падение напряжения создается током, определяемым как отношение разности потенциалов положительного управляющего напряжения и отрицательного напряжения «пилы» на конденсаторе к общему сопротивлению цепи, то потенциал базы транзистора, например Р5, определиться как

Когда потенциал базы выходного транзистора превышает + 5 В, транзистор открывается. Этим снимается с его коллектора блокирующий сигнал «+ 15 В» на триггерный блок. В триггерном блоке происходит подача отпирающих импульсов на тиристор в данной фазе.
Таким образом, с увеличением управляющего напряжения выходные транзисторы открываются раньше. Следовательно, в течение проводящего полупериода напряжения раньше открываются соответствующие тиристоры. К двигателю подводиться большее напряжение.

Триггерный блок КАЕ15 (блок U2) приведен на рис. 3. Он предназначен для выработки управляющих (отпирающих) импульсов на тиристоры силового блока. Эти импульсы поступают со вторичных обмоток импульсных трансформаторов m1, m2, m3 при прохождении тока по их первичным обмоткам, которые питаются через составные транзисторы Р5/Р6, Р8/Р9, Р11/Р12. На базы этих составных транзисторов через резисторы r15, r20, r25 и эмиттерный повторитель Р3, служащий усилителем мощности, подаются положительные импульсы от мультивибратора, собранного на Р2, Р1 и К1. Мультивибратор непрерывно работает с частотой около 1650 Гц. Колебания коллекторного напряжения транзистора Р2 в диапазоне от 20 до 12 В через разделительный конденсатор К2 поступают на базу Р3, на которой благодаря r9 также подано постоянное смещение. В результате напряжение на базе транзистора Р3 колеблется в пределах от -7 до +5 В.
Таким образом, при отсутствии запирающих сигналов система непрерывно вырабатывает импульсы на управляющие электроды тиристоров.
Запрет прохождения импульсов осуществляется при открытии транзисторов Р4, Р7, Р10, вследствие которого базы составных транзисторов заземляются на нуль, что приводит к их закрытию, несмотря на продолжающееся поступление импульсов с Р3.
Транзисторы Р4, Р7, Р10 открываются положительными управляющими сигналами с блока синхронизации, которые подаются на их базы через выводы 3, 2, 1 и резисторы r14, r19, r24. Кроме того, возможно одновременное открытие этих транзисторов при подаче блокирующего положительного сигнала значениям более 8 В на вывод 10.
Конденсаторы К6, К7, К8 фильтруют паразитные напряжения входных контуров импульсов запуска. Диоды n2, n4, n6 служат разрядными цепями для э.д.с. самоиндукции, возникающей в первичных цепях импульсных трансформаторов при запирании транзисторов Р6, Р9, Р12 и таким образом предохраняют эти транзисторы от пробоя перенапряжением.
Напряжение, блокирующее запирающие импульсы на тиристоры, составляет от +4 до +8 В.
Значение управляющих импульсов составляет 1 А при длительности 40 мкс.

Блок защиты (блок контрольных помех) КАЕ22 (блок I) приведен на рис. 4. Этот блок выдает сигнал на отключение питания механизма передвижения в следующих случаях:
при несимметричной токовой нагрузке фаз исполнительного двигателя выше установленного предела;
при несовпадении направления вращения ротора исполнительного двигателя с направлением, заданным контроллером;
при исчезновении питания цепей управления напряжением -15 В.
Выходной сигнал (вывод 15) данного блока управляет состоянием катушки d04 в релейном блоке КАЕ18 (блок М, см. рис. 1), через замыкающий контакт которого питается катушка реле d13. Реле d13 в свою очередь подает питание через свой замыкающий контакт на цепи катушек промежуточных реле и контакторов направления и тормоза.
При возникновении одной из названных неисправностей реле d04 и вслед за ним реле d13 обесточиваются, отключая двигатель от сети. Повторное включение возможно после установки командоконтроллера в нулевое положение при условии устранения неисправности.
Аварийный сигнал о несимметричной нагрузке представляется логической единицей (напряжение +6 В) на выходе операционного усилителя U1 (см. рис. 4)
Аварийный сигнал об отсутствии напряжения -15 В представляется логической единицей на аноде диода n12 (+15 В), которая образуется на делителе r10, r11 при исчезновении напряжения -15 В.
Аварийный сигнал по несовпадению направления вращения двигателя с заданным представляется логической единицей на выходе 8 инвертора U3C, которая подается на диод n14.
Любой из названных аварийных сигналов по истечении выдержки времени, определяемой временем заряда конденсатора К8, поступает на базу Р1 и открывает его.
С коллектора Р1 поступает нулевой сигнал на схему запоминания, собранную на двух элементах И – НЕ: U3d и U3a.
При отсутствии блокирующего (нулевого) сигнала К с блока логики управления (т.е. К=1) на выходе 15 образуется нулевой сигнал «Авария». Этот сигнал, как было описано выше, поступает на релейный блок, в результате чего происходит отключение двигателя.
Аварийное значение выхода d04 (нуль) остается и после устранения аварийного значения параметра (закрытия триода Р1). Для его снятия необходимо подать нуль на блокирующий вход К, для чего необходимо установить командоконтроллер в нулевое положение.
При отсутствии аварийных параметров выход d04 данного блока равен единице.
Рассмотрим цепи формирования аварийных сигналов.
Аварийный сигнал о несимметричной нагрузке двигателя вырабатывается на выходе U1. При симметричной нагрузке напряжения вторичных обмоток токовых трансформаторов фаз R, S, T двигателя после однополупериодного выпрямления диодами n1, n2, n3 создают одинаковые напряжения на конденсаторах К3, К4, К5, в результате напряжение на выходе U1 близко к нулю. При разбалансе токов фаз (в предельном случае – обрыв фазы) напряжение на выходе U1 возрастает, и, когда оно достигает +6 В, срабатывает описанная схема защиты.
Аварийный сигнал о несовпадении направления вращения с заданным формируется с помощью операционного усилителя U2 и логических элементов U4. Сигнал заданного направления подается в виде напряжения +12 В на вход d1 (13) или d2 (14).
Действительное направление вращения указывается полярностью сигнала тахогенератора, поступающего на вход 22 данного блока через дополнительный резистор. Напряжение на входе 22, достаточное для срабатывания схемы, составляет ±0,5 В.
Если задано направление вращения d1, напряжение тахогенератора на входе 22 должно быть положительным. Если задано направление d2, напряжение на входе 22 должно быть отрицательным.
Рассмотрим работу схемы, если задано направление d1. В этом случае при нормальном направлении вращения на инвертирующем входе 2 усилителя U2 присутствует положительный сигнал. Поэтому на его выходе должно появиться отрицательное напряжение, которое гаситься диодом обратной связи n15. Поэтому на выходе усилителя – нуль. В результате на выходе И – НЕ U4a – единица, на выходе НЕ U4d – единица, на выходе И – НЕ U4 – нуль (оба входа равны единице) и на выходе И – НЕ U4с – единица. Этот положительный потенциал через r18 и n16 поступает на базу Р2 и держит Р2 открытым. Напряжение коллектора Р2 равно нулю. Этот нулевой сигнал через два инвертора U3b, U3c подводиться к диоду n14. Таким образом, сигнал аварии отсутствует.
Если направление вращения ротора двигателя не совпадает с заданным, то отрицательный сигнал тахогенератора на входе 22 блока вызывает появление положительного напряжения порядка 10 В (логическая единица)и на выходе U2 (сопротивление резистора r16 в 100 раз меньше, чем сопротивление резистора r22). Так как d1 также равен логической единице, образуется нуль на выходе U4d, единица – на выходе U4b, единица – на выходе U4a (так как d2 равно нулю). В результате на оба входа И –НЕ U4c поступают единицы и на выходе этого элемента образуется нуль.
База Р2, спустя выдержку времени примерно 0,8 с, вызванную разрядом К11, приобретает нулевой потенциал, и Р2 закрывается. Единичный сигнал (высокий потенциал) с его коллектора поступает через n14 на память аварии, и происходит срабатывание защиты.
Если контроллер находиться в нулевом положении, напряжения d1, d2 равны нулю. В результате на обоих входах U5d – единицы, на выходе U5d – нуль, на выходе НЕ U5c – единица. Этот сигнал поступает на базу Р2 и держит его открытым, чем блокируется срабатывание защиты при любом направлении вращения двигателя в этом режиме.