Таблица 3.13 - Полная таблица переходов DV-триггера.
| D | V | QS | QS+1 |
На основании таблицы переходов и подграфа переходов ЗЭ по MS-схеме составим таблицу истинности для функций возбуждения ЗЭ.
Таблица 3.14 - Таблица истинности для функций возбуждения ЗЭ.
| D | V | QS | f1 | f2 |
| — | ||||
| — | ||||
| — | ||||
| — | ||||
| — | ||||
| — |
Произведём минимизацию функций возбуждения.
Таблица 3.15 - Минимизацию функций возбуждения для построения DV-триггера.
| D\VQs | ||||
| — | ||||
| — | — |

| D\VQs | ||||
| — | — | |||
| — |


Рисунок 3.11 - Комбинационная схема DV-триггера по MS-схеме на И-НЕ.

Рис. 3.12 – Диаграммы для комбинационной схемы DV-триггера по MS-схеме на И-НЕ.
Пример реализации Т-триггера по MS схеме на элементах ИЛИ-НЕ
Таблица 3.16 - Полная таблица переходов T-триггера.
| T | QS | QS+1 |
На основании таблицы переходов и подграфа переходов ЗЭ по MS-схеме получим таблицу истинности для функций возбуждения ЗЭ.
Таблица 3.17 - Таблица истинности для функций возбуждения ЗЭ для построения T-триггера.
| V | QS | f1 | f2 |
| — | |||
| — | |||
Произведём минимизацию функций возбуждения.
Таблица 3.18 – Минимизация функций возбуждения ЗЭ для построения T-триггера.
| T\Qs | ||
| — | ||

| T\Qs | ||
| — | ||


Рисунок 3.13 - Комбинационная схема Т-триггера по MS схеме на элементах ИЛИ-НЕ.

Рисунок 3.14 - Диаграмма переходов Т-триггера по MS схеме на элементах ИЛИ-НЕ на рисунке 3.13.
Пример реализации JK-триггера по схеме трех триггеров на И-НЕ
Таблица 3.19 - Полная таблица переходов JK-триггера.
| J | K | QS | QS+1 |
На основании таблицы переходов и подграфа переходов ЗЭ по схеме трёх триггеров составим таблицу истинности для функций возбуждения ЗЭ.
Таблица 3.20 - Таблица истинности для функций возбуждения ЗЭ.
| J | K | QS | f1 | f2 |
| — | ||||
| — | ||||
| — | ||||
| — | ||||
Таблица 3.21- Минимизация функций возбуждения ЗЭ.
| J\KQs | ||||
| — | ||||
| — |

| J\KQs | ||||
| — | — | |||

Рисунок 3.15 - Комбинационная схема JK-триггера.
Из-за того, что в цепи имеются обратные связи, для установки триггера в начальное состояние, в цепи обратной связи пришлось ввести дополнительный генератор, который в начальный момент времени устанавливает триггер в начальное состояние, а потом не влияет на работу схемы. Это достигается тем, что в начальный момент времени генератор подает 1 через элемент ИЛИ, а в последующие моменты времени он подает 0. В итоге получается, что в цепь обратной связи будет подаваться тот сигнал, который формируется на выходе триггера.
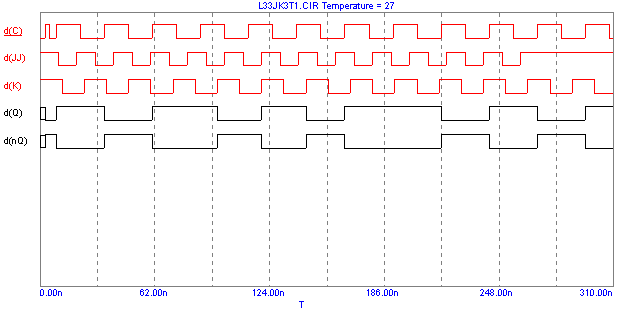
Рисунок 3.16 - Диаграмма переходов для полученной схемы на рис 3.15.
ЛАБОРАТОРНАЯ РАБОТА №4. ПРОЕКТИРОВАНИЕ И ИССЛЕДОВАНИЕ СИНХРОННЫХ АВТОМАТОВ
Общие сведения
Цифровой или дискретный автомат — это устройство, осуществляющее приём, хранение и преобразование дискретной информации по некоторому алгоритму.
Теория автоматов разделяется на абстрактную и структурную. Абстрактная теория проектирования автоматов включает определение реакции автомата на внешнюю среду. Структурная теория изучает как структуру самого автомата так и структуру входных воздействий и реакцию автомата на выход.
При синтезе автомата необходимо определить: Х–входной алфавит, Y–выходной алфавит, А–алфавит состояний автомата, функцию переходов d, которая описывает переход автомата из одного состояния в другое под воздействием входного сигнала, функцию выхода l, определяющую выходной сигнал, которая зависит от состояния, в котором находится автомат в данный момент, и может зависеть от входного сигнала. Состояние—это абстрактное понятие, которое характеризует состояние автомата в данный момент, хранит всю предысторию. Для автомата Мура выходной сигнал является функцией от состояния, для Мили—от состояния и входного сигнала.
Автомат Мура полностью описывается системой уравнений:
a(t+1)= d(a(t),x(t)),
y(t)=l(a(t)),
где a(t+1) состояние автомата в момент времени t+1, a(t) состояние автомата в момент времени t, x(t) сигналы на входе автомата в момент времени t.
Для автомата Мили система уравнений имеет вид:
a(t+1)= d(a(t),x(t)),
y(t)=l(a(t),x(t)).
Рассмотрим проектирование автоматов на примере.