Силовой анализ плоского рычажного механизма
Цель работы – силовой анализ механизма методом планов сил и методом рычага Жуковского.
Задается структурная схема, угол, определяющий положение кривошипа, частота вращения ведущего звена, размеры и массы звеньев.
Последовательность выполнения работы
1. Построить план положение механизма в заданном положении.
2. Для данного положения механизма построить планы скоростей и ускорений.
3. Используя план ускорений, определить величину и направление векторов сил инерции звеньев.
4. Определить силы тяжести звеньев.
5. Вынести на свободную часть листа наиболее удаленную от входного звена структурную группу Ассура. В соответствующих точках приложить действующие силы.
6. Составить векторные уравнения сил и уравнения моментов, решив которые определить реакции в кинематических парах.
Если механизм содержит не одну группу Ассура, то действия 6,7 выполнить последовательно для всех групп в порядке, обратном образованию механизма.
7. Произвести силовой расчет ведущей группы (начального механизма). Определить уравновешивающую силу (уравновешивающий момент). Найти реакцию во внутренней кинематической паре стойка – ведущее звено.
8. Определить уравновешивающую силу (уравновешивающий момент) с помощью рычага Жуковского.
9. Сравнить уравновешивающую силу (уравновешивающий момент полученные двумя методами. Определить погрешность.
Пример выполнения работы
На рис. 1 приведена структурная схема кривошипно-шатунного механизма одноцилиндрового двигателя внутреннего сгорания.
Исходные данные для проектирования:
- длина кривошипа, LOA = 6 см;
- длина шатуна, LАВ = 24 см;
- частота вращения кривошипа, n1 = 1000 об/мин;
- сила полезного сопротивления, PПС = 500 Н;
- вес одного погонного метра шатуна, q = 200 Н/м;
- масса поршня, m3 = 4 кг;
- угол, определяющий положение кривошипа a = 30°;
Массой кривошипа ОА (звено 1) пренебречь.

Рис. 1. Схема механизма
1 Структурный анализ механизма
Определение степени подвижности механизма по формуле П.Л.Чебышева:
W=3(n-1)-2P5-P4,
все формулы писать в редакторе формул и в текст обозначения выносить из редактора формул
где n=4 – число всех звеньев механизма; P5 = 4 – число кинематических пар 5-го класса; P4 = 0 – число кинематических пар 4-го класса.
Подставив эти данные в формулу Чебышева находим;
W=3*(4-1)-2*4-0 = 1.
Расчленим механизм на группы Ассура и ведущую группу. Вычертим каждую группу отдельно.
 Стойку обозначить индексом «0»
Стойку обозначить индексом «0»
Все рисунки выполнять в графическом редакторе
Рис. 2 Составляющие механизм группы:
а) группа Ассура; б) ведущая группа.
Как видно на рис.2, механизм состоит из одной группы Ассура 2 класса 2 порядка, состоящая из звена 2 и 3, и ведущей группы (начального механизма), состоящей из стойки 0 и звена 1. В целом рассматриваемый механизм 2 класса.
Запишем формулу строения механизма (структурную формулу)
I(1-0)  II(2-3)
II(2-3)
2 Кинематическое исследование механизма
Построим схему механизма. Приняв на чертеже (см. рис.3) отрезок ОА=40см, находим масштабный коэффициент плана скоростей:
KL=LOA/OA=0.06/40=0.0015м/мм. Масштабный коэффициент обозначать 

Построить только заданное положение механизма
Рис.3 12 положений механизма План пложения механизма
В принятом масштабе отрезок АВ на чертеже, соответствующий длине шатуна, будет равен:
AB=LAB/KL=0.24/0.0015=160мм.
Нам достаточно построить план положения в заданном положении
Для построения 12 положений звеньев механизма разделим траекторию, описываемую точкой А кривошипа ОА, на 12 равных частей. За “нулевое” принимаем то положение кривошипа, при котором точка В поршня занимает крайнее верхнее положение. Из отмеченных на окружности точек А0, А1…А11 раствором циркуля, равным АВ=160мм, намечаем на линий движения поршня точки В0, В1, В2…В11. соединяем прямыми точки А0 с В0, А1 с В1 и т.д. получаем 12 положений звеньев механизма.
Построение плана скоростей
Построим план скоростей для положения механизма, когда a=30°. Это положение механизма в данном случае совпадает со вторым (выделенным) положением.
Определим линейную скорость концевой точки ведущего звена:
VA=w1*LOA=104.7*0.06=6.28м/с где
w1=p*n1/30=3,14*1000/30=104,7рад/с
Определим масштаб плана скоростей:
KV=VA/PV a =6.28/100=0,0628м/с*мм,
где PV a =100мм – длинна вектора скорости точки А на плане (выбирается произвольно)
Из точки PV, принятой за полюс плана скоростей (см. рис.4), откладываем перпендикулярно звену 1 в направлении вращения кривошипа ОА вектор скорости тачки А: PV a =100мм.
Построение плана скоростей группы Ассура (звенья 2 и 3) производим по векторному уравнению.
VB=VA+VBA,
где VA – скорость точки А кривошипа ОА (её величина определена выше);
VBA – скорость точки В звена 2 во вращательном движении относительно точки А (направлена перпендикулярно оси звена АВ);
VB – скорость точки В звена 3 (направлена вдоль оси ОВ).
Решаем графически получаем векторное уравнение: из точки а проводим линию, перпендикулярную оси звена АВ, а из полюса PV плана скоростей – линию, параллельную оси звена ОВ. Точка пересечения этих линий даёт конец вектора искомой скорости PV.
Истинное значение скорости каждой точки находим по формулам:
VB = (PV в)*KV = 98*0,0628 = 6,15 м/с
VВА = (ав)*KV = 51*0,0628 = 3,2 м/с
Определим угловую скорость шатуна АВ(звено 2):
w2 = VВА/LАВ = 3,2/0,24 = 13,3 рад/с:
Направление угловой скорости шатуна АВ определяем следующим образом. Переносим (мысленно) вектор ав скорости VBA с плана скоростей в точку В шатуна АВ механизма и наблюдаем направление поворота звена АВ вокруг точки А. Таким образом, в данном положении механизма угловая скорость шатуна АВ направлена против хода часовой стрелки.
Построение плана ускорений
Построение плана ускорений рассмотрим также для второго (выделенного) положения механизма (см. рис.3).
Так как кривошип ОА вращается с постоянной угловой скоростью w1 = 104,7 рад/с, то точка А звена 1 будет иметь только нормальное ускорение, величина которого равна:
а А = а Аn = w12*LОА = 104,72*0,06 = 657,7 м/с2;
определим масштаб плана ускорений:

К а = а А/p а = 657,7/100 = 6,577 м/с2*мм, где
p а = 100 мм – длина отрезка, изображающего на плане ускорений вектор ускорении точки А звена 1 (выбирается произвольно). Полюс обозначать 
Из произвольной точки П – полюса плана ускорений проводим вектор П а – 100 мм параллельно звену ОА от точки О (рис.5).

Рис.4. План скоростей

Рис.5. План ускорений
Построение плана ускорений группы Ассура (звена 2 и 3) проводим согласно уравнению:
а В = а А+ а ВАn+ а ВАt,
где а В – ускорение звена 3 (направленно вдоль оси ОВ);
а ВАn – нормальное ускорение точки В при вращении вокруг точки А (направленно вдоль оси АВ от точки В к точке А);
а ВАn = w22+LАВ = 13,32+0,24 = 42,5 м/с2:
Его масштабная величина (обозначим её аn) равна:
аn = а ВАn/К а = 42,5/6,577 = 6,5мм
а ВАt - касательное (тангенциальное) ускорение точки В при вращении вокруг точки А (величина неизвестна), направлена перпендикулярно к оси звена АВ.
Из точки а плана ускорений проводим прямую параллельную оси звена АВ и откладываем на ней в направлении от точки В к точки А отрезок аn = 6,5 мм. Через конец вектора аn проводим прямую перпендикулярную к оси АВ произвольной длинны. Из полюса p проводим прямую параллельно оси ОВ. Точка в пересечение этих прямых определит конец векторов p в и nв. Складывая вектора аn и nв получаем полное ускорение звена АВ для этого соединяем точка а и в прямой.
Числовые значения ускорений найдем по формулам:
а В = (p в)*К а = 38*6,577 = 249,9 м/с2;
а ВАt = (nв) * К а = 86*6,577 = 565,6 м/с2;
а ВА= (ав)*К а = 87*6,577 = 572,2 м/с2.
Определим величину углового ускорения звена АВ. Для этого:
e2 = а ВАt/ LАВ = 565,6/0,24 = 2356,6 рад./с2
Определяем направление углового ускорения звена АВ. Для этого мысленно переносим вектор а ВАt в точку В. Считая точку А неподвижной замечаем, что поворот звена АВ будет по ходу часовой стрелки.
Таким образом, направления угловой скорости и угловой ускорения противоположны: значит, шатун АВ в этом положении имеет замедление движение.
План ускорений для других положений механизма строятся аналогично.
3. Силовое исследование механизма
Силовой расчёт проводим для положения механизма, положения ведущего звена (кривошипа ОА) которого определяется углом a. В нашем примете a=30°, т.е. силовой расчёт проводим для второго (выделенного на рис. 3) положения механизма, для которого план скоростей и план ускорений уже построены (см. рис. 4 и 5).
Для определения величины и направления сил инерции звеньев перечертим план ускорений (см. рис. 6).

Рис. 6. План ускорений (к вопросу определения величины и направления сил инерции) Эти построения выполнить на одном плане ускорений
Считая, что рычажные звенья механизма выполнены в виде однородных стержней постоянного сечения по всей длине и используя метод подобия, наметим на пане точки S2 и S3. Соединив эти точки с полюсом получим векторы ускорений центров тяжести звеньев. Величины этих ускорений будут равны:
а S2 = (pS2)*К а = 62*6,577 =407,8 м/с2;
а S3 = ав = 249,9м/с2;
Определим силы тяжести звеньев механизма
G2 = q* l АВ = 200*0,24 = 48 Н;
G3 = m3*g = 4*9,81 = 39,2 Н.
Масса шатуна будет равно
m 2 = G2/g = 48/9,81 = 4,9 кг.
Согласно векторной форме PИН = -m*as направление силы инерции противоположно направлению ускорению центров тяжести звеньев. Величины сил инерции определим по формулам:
PИН1 = 0, т.к. массой кривошипа пренебрегаем (m1 = 0);
PИН2 = m2* а S2 = 4,9*407,8 = 1998,2 Н;
PИН3 = m3* а S3 = 4*249,9 = 999,6 Н.
Определим точку приложение силы инерции шатуна АВ (звена 2) т.е. плечо h относительно центра тяжести шатуна S2.
Эта сила инерции даёт момент относительно центра тяжести т.е.
PИН2*h = МИН2,
H = МИН2/PИН2
МИН1 = JS2*e2 = 0,024*2356,6 = 55,4 Нм,
где JS2 = m2* l АВ2/12 = 4,9*0,242/12 = 0,024 кг*м2:
e2 = 2356,6 рад/с – определена ранее (см. выше).
Используем масштабный коэффициент KL определяем плечо h.
h = МИН2/PИН2*KL = 55,4/1996,2*0,0015 = 18,5 мм.
Силовой расчёт группы Ассура 2 – 3
Выносим группу Ассура состоящую из звеньев 2 и 3 на свободное поле листа (см. рис. 7) в том же масштабе KL = 0,0015 м/мм.
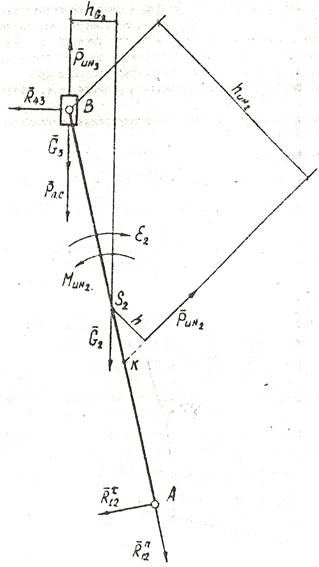
Рис. 7. Расчёт группы Ассура 2–3
Приложим к звеньям группы в соответствующих точках все известные силы: G2, PИН2, G3, PИН3, PПС.
Применение: согласно векторному уравнению МИН = - JS*e, момент силы инерции направлен в противоположную сторону угловому ускорению, т.е. в нашем случае сила инерции РИН2 на плечё h должна давать момент относительно точки S2 против хода часовой стрелки.
Действие звена 1 и стойки 4 заменяем неизвестными реакциями R12 и R43. Реакцию R12 для удобства вычислим раскладывая на 2 составляющих: R12n – по оси звена 2 и R12t - перпендикулярно оси звена. R43 – реакция со стороны стенки цилиндра на поршень 3, направлена перпендикулярно оси цилиндра.
Так как имеем три неизвестных реакции, т.е. более 2-х, то одну из них (R12t) определим аналитически. Для этого составим сумму моментов всех сил относительно внутренней кинематической пары (точки В):
SМВ(F)=0
R12t*АВ- PИН2* hИН2+ G2*hG2 = 0, отсюда
R12t = PИН2* hИН2-G2*hG2/АВ = 1988,2*86-43*18/160 = 1068,1 Н
Реакции R12n и R43 определим построением силового многоугольника, решая графически векторное уравнения равновесия группы Ассура 2–3 (см. рис. 8).

Рис. 8. План сил группы Ассура 2-3
Уравнения равновесия:
SF = 0
R12n+R12t+ G2+ G3+РПО+РИН2+РИН3+ R43 = 0;
Определи масштаб построения плана сил
КР = R12t/Н а = 1068,1/100 = 10,681 Н/м
где Н а = 100 мм – отрезок, соответствующий R12t на плане сил (выбирается произвольно).
Согласно полученному масштабу определим отрезок, соответствующий другим известным силам:
ав = G2/КР = 48/10,681 = 4,5 мм;
вс = G3/КР = 39,2/10,681 =3,7 мм;
cd = РПС/КР = 500/10,681 = 47 мм;
de = РИН2/КР = 1998,2/10,681 = 187 мм;
ef = РИН3/КР = 999,6/10,681 = 94 мм.
Из произвольной точки Н, выбранное за полюс, в масштабе КР = 10,681 н/мм откладываем последовательно все известные силы R12t, G2, G3, РПС, РИН2, РИН3, перенося их параллельно самим себе в план сил.
Далее через конец вектора РИН3 (точка f) проводим линию, перпендикулярную оси цилиндра ОВ до пересечения с прямой, проведённой из полюса Н параллельно оси звена АВ. Точка пересечения этих прямых (g) определим модуль реакции R12n и R43.
Примечание: если отрезки, соответствующие некоторым силам, получается меньше 1 мм, то их не следует откладывать на плане сил.
Итак: R12n = (gН)*КР = 153*10,681 = 1634,2 Н;
R12t = (gа)*КР = 184*10,681 = 1965,3 Н;
R43 = (f g)*КР = 66*10,681 = 704,9 Н.
Силовой расчёт ведущей группы 1-4
Выносим отдельно на свободное поле чертежа ведущую группу. Состоящую из входного звена 1 и стоики 4 (рис. 9), и прикладываем все действующие на неё силы:
– реакцию R21 = -R21 (направлена в противоположную сторону реакции R12, полученной на плане сил 2–3);
– уравновешивающую силу РУР (направленную перпендикулярно оси входного звена и приложена к концевой её точки).

Рис. 9. Красчету ведущей группы 1-4
Составим сумму моментов всех сил, действующих на группу, относительно внутренней кинематической пары (точки 0):
SМ0(F)=0
РУР*ОА- R21*hА = 0, отсюда
РУР = R21*hА/ОА = 1965,3*25,5/40 = 1252,9 Н
В шарнире 0 со стороны стойки 4 на звено 1 действует реакция R41, которую определяем построением многоугольника сил (план сил) согласно векторному уравнению:
SF=0
РУР+ R21+ R41 = 0.
Определим масштаб построения
КР = РУР/Н а = 1252,9/100 = 12,529 Н/мм
где Н а = 100 мм – отрезок, соответствующий на плане сил уравнивающей силе РУР (выбирается произвольно).
Согласно полученному масштабу отрезок, соответствующий силе R21, будет равен:
ав = R21/КР = 1965,3/12,529 = 157 мм
Из произвольной точки Н, избранной за полюс, откладываем последовательно: известные силы – РУР и R21 (рис.10). Соединив начало РУР (точка Н) с концом R21 (точка в) получим реакцию R41.
R41 = (в Н)*КР = 121*12,529 = 1516 Н

Рис. 10 План сил ведущей группы 1-4
Определение уравновешивающей силы по методу Жуковского
Для данного положения механизма в масштабе KV строим план скоростей, повернутый на 90°(рис.10). В одноимённые точки плана переносим все внешние силы (без масштаба), действующие на звенья механизма, в том числе и силу РУР. Точку приложения силы РИН2 на плане находим из пропорций:
АК/АВ = ак / ав, отсюда
ак = АК* ав /АВ = 58*51/160 = 18,5 мм.
Составляем уравнения момента всех сил относительно полюса РV плана скоростей, беря плечи всех сил с чертежа в мм.
SМРV(F) = 0
РУР*ОА- РИН2*h1+ G2*h2+(РПС G3-РИН3)* РV в = 0;
РУР = РИН2*h1+ G2*h2+(РПС G3-РИН3)* РV в /ОА =
= 1988,2*43-48*92-(500+39,2-999,6)*98/100 = 1266,3 Н.
Расхождение результатов определения уравновешивающей силы методом Жуковского и методом плана сил равно:
d = (1266,3-1252,9/1266,3)*100 = 1,1%.
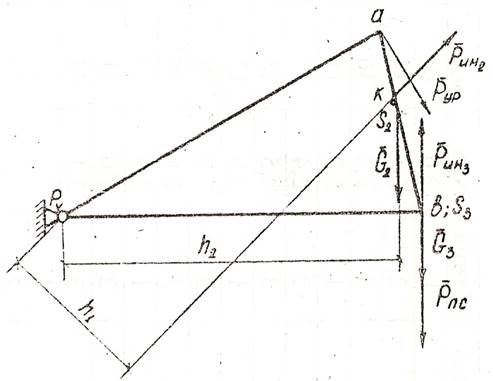
Рис. 11. Рычаг Жуковского
Контрольные вопросы
1. Какие силы действуют на звенья рычажного механизма?
2. В чем заключается задачи силового расчета механизма?
3. В какой последовательности выполняется силовой расчет механизма?
4. В какой последовательности производится определение реакций в механизме, состоящем из нескольких групп Ассура?
5. В какой последовательности определяются реакции в группе Ассура?
6. Как определяются реакция во внутренней кинематической паре группы Ассура?
7. Напишите векторноые уравнения сил, действующих на звенья группы Ассура.
8. Как определить величину и направление вектора силы инерции звена, используя план ускорений?
9. Охарактеризуйте каждую силу по следующим ее параметрам – модулю, направлению и точке приложения.
10. Как построить рычаг Жуковского и как с его помощью определить уравновешивающую силу (уравновешивающий момент)?
11. В чем преимущество и недостатки двух методов силового расчета?