1. Задание для выполнения: смоделировать разгон электродвигателя 4А100L4У3, (Pн = 4,0 кВт, n0 = 1500 об/мин, Sн = 0,046, Sк = 0,32, μк = 2 ,4) с сельскохозяйственным механизмом (Mпс = 3,5 Нм, kд = 0,15 Нм/рад/с, Im = 3,3 кгм 2) и исследовать зависимость времени разгона и установившейся частоты вращения от коэффициента динамической нагрузки;
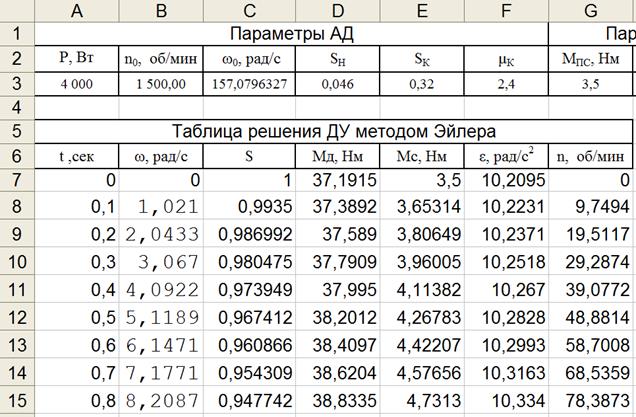
2. По результатам расчета получаем механические характеристики АД и СХМ, представленные в таблице 2. Из таблицы видно, что установившаяся частота вращения, после завершения разгона, находится в интервале 1400...1450 об/мин, где выравниваются крутящие моменты АД и СХМ, при этом Муст равен ~26 Нм;
3. Средствами Excel или Matlab строим полученные характеристики графически и находим на графике точку установившегося движения (У) (рисунок 5). Ее значение равно ~1420 об/мин. При решении задачи на языке Pascal график строится по рассчитанным точкам.
Таблица 2 – Механические характеристики АД и СХМ
| Частота вращения n, (об/мин) | Угловая скорость ω, (рад/сек) | Крутящий момент (Нм) на валах | |
| АД (Мдв) | СХМ (Мс) | ||
| 0,00 | 37,19 | 3,50 | |
| 10,47 | 39,31 | 5,07 | |
| 20,94 | 41,63 | 6,64 | |
| 31,42 | 44,18 | 8,21 | |
| 41,89 | 46,97 | 9,78 | |
| 52,36 | 49,98 | 11,35 | |
| 62,83 | 53,20 | 12,92 | |
| 73,30 | 56,53 | 14,50 | |
| 83,78 | 59,76 | 16,07 | |
| 94,25 | 62,50 | 17,64 | |
| 104,72 | 64,01 | 19,21 | |
| 115,19 | 63,01 | 20,78 | |
| 125,66 | 57,58 | 22,35 | |
| 136,14 | 45,49 | 23,92 | |
| 146,61 | 25,58 | 25,49 | |
| 157,08 | 0,00 | 27,06 |

Рисунок 5 – Механические характеристики асинхронного электродвигателя и стационарного СХМ по примеру задания
4. Выполняем моделирование разгона системы, изображенной на рисунках 1 и 2. Для этого Mдв выражаем из уравнений модели в виде:
 .
.
В разработанной блок-схеме алгоритма (рисунок – 6) в первом блоке вводятся исходные данные для моделирования: номинальная мощность АД Р, синхронная угловая скорость АД  , номинальное скольжение АД Sн, критическое значение скольжения Sk, кратность критического момента μk, пусковой момент сопротивления сельхозмеханизма Mпс, коэффициент динамической нагрузки kД, момент инерции IМ, шаг по времени D t, начальное время моделирования t1, угловая скорость АД в начальный момент времени
, номинальное скольжение АД Sн, критическое значение скольжения Sk, кратность критического момента μk, пусковой момент сопротивления сельхозмеханизма Mпс, коэффициент динамической нагрузки kД, момент инерции IМ, шаг по времени D t, начальное время моделирования t1, угловая скорость АД в начальный момент времени  и допустимая погрешность вычислений
и допустимая погрешность вычислений  . В блоках, 2 и 3 переменным времени t и угловой скорости АД
. В блоках, 2 и 3 переменным времени t и угловой скорости АД  присваиваются значения начального времени моделирования и угловой скорости АД в начальное время моделирования t1. В блоке 4 рассчитывается скольжение S, а в блоке 5 – крутящий момент АД MДВ. В блоке 6 рассчитывается момент сопротивления сельхозмеханизма Mс, в блоке 7 угловое ускорение разгона вала электродвигателя
присваиваются значения начального времени моделирования и угловой скорости АД в начальное время моделирования t1. В блоке 4 рассчитывается скольжение S, а в блоке 5 – крутящий момент АД MДВ. В блоке 6 рассчитывается момент сопротивления сельхозмеханизма Mс, в блоке 7 угловое ускорение разгона вала электродвигателя  , в блоке 8 – угловая скорость пересчитывается на частоту вращения n в об/мин.
, в блоке 8 – угловая скорость пересчитывается на частоту вращения n в об/мин.
Вывод результатов расчета: времени моделирования (t), скольжения S и крутящего момента АД MДВ, момента сопротивления сельхозмеханизма Mс, частоты вращения n и углового ускорения проводится в блоке 9. В блоке 10 проводится изменение времени моделирования t на величину шага по времени D t, а в блоке 11 – расчет угловой скорости в последующий момент времени t методом Эйлера. В 12 блоке проводится проверка на окончание разгона сельхозмеханизма. Если величина рассчитанного углового ускорения по абсолютной величине приближается к нулю на величину допустимой погрешности, то можно считать, что разгон электродвигателем сельхозмеханизма закончился. На основании разработанного алгоритма написана программа на языке Pascal. Последовательность ее операторов соответствует разработанной блок-схеме алгоритма.
Программа расчета процесса разгона электродвигателем стационарного сельскохозяйственного механизма на языке Pascal
Программа 1
var
p,Nmax,Wmax,sh,sk,mk,mpc,kd,im,dt,t1,w1,w,t,s,md,mc,eps,n:real;
begin
write('p,Nmax,Wmax,sh,sk,mk,mpc,kd,im,dt,t1,w1');
readln(p,Nmax,Wmax,sh,sk,mk,mpc,kd,im,dt,t1,w1);
t:=t1;
w:=w1;
repeat
s:=1-(w/Wmax);
md:=(2*p*mk*sk*(Wmax-w))/
((1-sh)*((Wmax-w)*(Wmax-w)+Wmax*Wmax*sk*sk));
mc:=mpc+(kd*w);
eps:=(md-mc)/im;
N:=30*w/Pi;
writeln('t=',t:6:2,' w=',w:6:2,' s=',s:5:3,' md=',md:6:2,
' mc=',mc:6:2,' eps=',eps:6:4,' n=',n:6:2);
t:=t+dt;
w:=w+eps*dt;
until ABS(eps)<0.001;
end.

Рисунок 6 – Блок-схема алгоритма расчета разгона электродвигателем стационарного сельскохозяйственного механизма
Пример выполнения задания в системе Matlab
По построенной модели в пакете Simulink системы Matlab, решим дифференциальное уравнение при начальных условиях  . В качестве входных величин выбираем заданные по условию параметры. А в качестве выходных величин модели будем рассматривать ε, ω и Мдв, Мс.
. В качестве входных величин выбираем заданные по условию параметры. А в качестве выходных величин модели будем рассматривать ε, ω и Мдв, Мс. 
Возможный вариант простейшей модели представлен на рисунке 7. Обозначения на схеме: P – номинальная мощность, Вт; n – частота вращения холостого хода, об/мин; S – номинальное скольжение, о.е.; Sk – критическое скольжение, о.е; Muk – кратность критического момента, о.е.; Mps – пусковой момент сопротивления СХМ, Н∙м; Mdv – момент АД, Н∙м; Kd – коэффициент динамической нагрузки, о.е.; Im – момент инерции маховика, кг∙м2; Om – текущая угловая скорость ω, рад/с; OMo – угловая скорость холостого хода ω0, рад/с; eps – угловое ускорение, рад/с2.
Заданные параметры представим блоками Constant. Значения параметров заносятся как обычно в окнах соответствующих блоков, а в окне для параметра Омо записано выражение переводящее значение OMo из (об/мин) в (рад/сек). Параметры для выражения расчета Мдв (двигатель) объединяются блоком Mux, в окне которого установим число входов 6. А параметры для расчета выражения Мс (нагрузка) блоком Mux с тремя входами.
Выходные параметры подаются парами Мdv и Ms, eps и OM, через блоки Mux на блоки Scope. Частота вращения ОМ снимается с выхода интегратора, а eps с его входа. Угловое ускорение eps формируется выражением по расчету  , правая часть которого реализуется блоком Fcn. На вход этого блока, через блок Mux, подаются две величины: u(1) – от блока Constant, представляющего Im, и u(2) – от блока Sum (найти его можно в библиотеке Math), который выполняет операцию u(2) = Mdv – Ms. Блок Fcn осуществляет деление u(2)/u(1).
, правая часть которого реализуется блоком Fcn. На вход этого блока, через блок Mux, подаются две величины: u(1) – от блока Constant, представляющего Im, и u(2) – от блока Sum (найти его можно в библиотеке Math), который выполняет операцию u(2) = Mdv – Ms. Блок Fcn осуществляет деление u(2)/u(1).

Рисунок 7.3 – Модель процесса разгона асинхронным электродвигателем стационарного сельхозмеханизма
Блоки Fcn, представляют выражения по расчету Мдв и Мс (Двигатель и Нагрузка на схеме). В окнах этих блоков запишем соответствующие выражения, представленные через входные величины объединителей: u(1), u(2),…,u(6) – для Двигателя и u(1),u(2),u(3) – для Нагрузки. Входы и индексы величин нумеруются сверху вниз. Параметры для блока Двигатель представлены на рисунке 8. При моделировании изменение параметров можно производить редактированием параметров в окнах соответствующих блоков.
 |
Рисунок 8 – Выражение для расчета Мдв, записанное через входные величины объединителя Mux
Установим время моделирования 35 с. Тогда разгонные характеристики примут вид, изображенный на рисунках 9, 10, где представлены окна соответствующих блоков scope. Масштаб графика ускорения получился достаточно мелким. Для просмотра его можно изменить, нажав кнопку ZoomY-axis (третья слева) и пощелкав мышкой на кривой. Если необходимо, чтобы сигнал eps сразу был изображен в увеличенном масштабе, его можно усилить с помощью блока Gain (Усилитель).
Время разгона удобно определять по графикам моментов (рисунок 10) в точке, где линии сливаются. На рисунке 10 эта точка соответствует примерно 18 с. Если необходимо повысить точность, то можно на этой точке щелкнуть мышкой требуемое число раз (предварительно нажав кнопку Zoom Y-axis). При этом получим вид, который показан на рисунке 11, на котором время разгона будет около 19 с. Из графика видно, что величина Муст близка к значению 26 Нм.

Рисунок 9 – Изменение скорости и ускорения при разгоне асинхронным электродвигателем стационарного СХМ

Рисунок 10 – Изменение Мдв и Мс при разгоне асинхронным электродвигателем стационарного СХМ
В технических системах обычно считают, что процесс установился если он отличается от установившегося значения на ±5%. Рисунок 10 приблизительно соответствует этому требованию, а рисунок 11 позволяет фиксировать отклонение не хуже 1%.

Рисунок 11 – Увеличенное изображение графиков Мдв и Мс для уточнения времени разгона сельхозмеханизма
Чтобы узнать точное установившееся значение моментов и частоты вращения можно решить систему уравнений математической модели задания или увеличить время моделирования и выводить данные не только в блок Scope, но и в блок Display, который выдает информацию в цифровой форме.
В качестве дополнения можно автоматизировать процесс определения времени разгона, задав уровень устанавливающейся величины, по достижении которого процесс можно считать установившимся. Этот момент можно фиксировать, например блоком Hit Crossing (обнаружено пересечение). В качестве определяемой величины удобно взять ускорение, т.к. при завершении разгона оно всегда стремится к нулю.
Пример выполнения задания в пакете Excel
Для решения этой задачи на рабочем листе Excel воспользуемся таблицей 3.
Таблица 3 – Пример выполнения задания в пакете Excel
| A | B | C | D | E | F | G | H | I | J | K | L | |
| Параметры АД | Параметры СХМ | |||||||||||
| P, Вт | n0, об/мин | ω0, рад/c | SН | SК | μК | MПС, Нм | kД | Im, кг*м2 | Δt, c | t (0), c | ω(0),рад/с | |
| 4 000 | 1 500,00 | 0,046 | 0,32 | 2,4 | 3,5 | 0,15 | 3,3 | 0,1 | ||||
| Таблица решения ДУ методом Эйлера | ||||||||||||
| t,сек | ω, рад/с | S | Mд, Нм | Mc, Нм | ε, рад/с2 | n, об/мин | ||||||


t=t (0)

ω=ω(0)




Mс = Mпс + kдω





t=t+ Δt



В ячейки C8–G8 копируются, соответственно, формулы из ячеек C7–G7.

Далее строка 8 копируется, начиная с девятой на 500 строк, до тех пор пока переходной процесс не установится. Каждая скопированная строка соответствует одному шагу по времени.

Для построения графиков моментов АД и СХМ выделим блоки ячеек А7–А500 и D7–E500 и вызовем «Мастер диаграмм». На вкладке «Стандартные» выберем тип диаграммы – «Точечная»и вид – «Точечная диаграмма со значениями, соединенными сглаживающими линиями без маркеров». Руководствуясь указаниями «Мастера диаграмм», построим графики и расположим диаграмму на одном листе вместе с результатами расчета.

Рисунок 7.1 – Изменение Мдв и Мс при разгоне асинхронным электродвигателем стационарного СХМ
Аналогично выделяя блоки ячеек А7–А500 и F7–F500, а также А7–А500 и В7–В500 строим графики ускорения и скорости.

Рисунок 7.2 – Изменение скорости и ускорения при разгоне асинхронным электродвигателем стационарного СХМ
Проводим исследование динамики разгона заданного АД. Параметр для исследований - kд. Он изменяется в диапазоне 0,0375... 0,2625. Необходимо построить зависимости  ,
,  и
и  . Для этого диапазон 0,0375... 0,2625 разбиваем на 6..10 участков, например:
. Для этого диапазон 0,0375... 0,2625 разбиваем на 6..10 участков, например:
| 0,0375, | 0,075, | 0,1125, | 0,15, | 0,1875, | 0,225, | 0,2625. |
и подставляем в таблицы 4.1 – 4.3.
Таблица 4.1 – Результаты исследования разгона асинхронным электродвигателем стационарного СХМ по примеру задания
| kд | Нм/рад/с | 0,0375 | 0,075 | 0,1125 | 0,15 | 0,1875 | 0,225 | 0,2625 |
| tр | с |
Таблица 4.2 – Результаты исследования разгона асинхронным электродвигателем стационарного СХМ по примеру задания
| kд | Нм/рад/с | 0,0375 | 0,075 | 0,1125 | 0,15 | 0,1875 | 0,225 | 0,2625 |

| рад/сек |
Таблица 4.3 – Результаты исследования разгона асинхронным электродвигателем стационарного СХМ по примеру задания
| kд | Нм/рад/с | 0,0375 | 0,075 | 0,1125 | 0,15 | 0,1875 | 0,225 | 0,2625 |
| Mуст | Нм |
При выполнении задания в электронных таблицах Excel для kд =0.15 получены графики показанные на рисунках 7.1 и 7.2.
На рисунке 7.1 находим tр=18сек.

Рисунок 7.1б – Изменение Мдв и Мс при разгоне асинхронным электродвигателем стационарного СХМ
Подставляем полученное значение в таблицу 4.1
Таблица 4.1б – Результаты исследования разгона асинхронным электродвигателем стационарного СХМ по примеру задания
| kд | Нм/рад/с | 0,0375 | 0,075 | 0,1125 | 0,15 | 0,1875 | 0,225 | 0,2625 |
| tр | с |
Аналогично находим  =149рад/cек и Mуст =26Нм.
=149рад/cек и Mуст =26Нм.

Рисунок 7.2б – Изменение скорости и ускорения при разгоне асинхронным электродвигателем стационарного СХМ
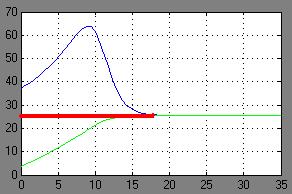
Рисунок 7.1в – Изменение Мдв и Мс при разгоне асинхронным электродвигателем стационарного СХМ
Таблица 4.2б – Результаты исследования разгона асинхронным электродвигателем стационарного СХМ по примеру задания
| kд | Нм/рад/с | 0,0375 | 0,075 | 0,1125 | 0,15 | 0,1875 | 0,225 | 0,2625 |
|
| рад/сек |
Таблица 4.3б – Результаты исследования разгона асинхронным электродвигателем стационарного СХМ по примеру задания
| kд | Нм/рад/с | 0,0375 | 0,075 | 0,1125 | 0,15 | 0,1875 | 0,225 | 0,2625 |
| Mуст | Нм |
Значение kд каждого из участков
| 0,0375, | 0,075, | 0,1125, | 0,1875, | 0,225, | 0,2625. |
поочередно подставляем в модель и по графикам находим значения tр,  и Mуст для каждого значения kд.
и Mуст для каждого значения kд.
Заполняем таблицы 4.1 – 4.3.
Таблица 4.1в – Результаты исследования разгона асинхронным электродвигателем стационарного СХМ по примеру задания
| kд | Нм/рад/с | 0,0375 | 0,075 | 0,1125 | 0,15 | 0,1875 | 0,225 | 0,2625 |
| tр | с | 16,7 | 17,3 | 18,6 | 19,3 |
Таблица 4.2в – Результаты исследования разгона асинхронным электродвигателем стационарного СХМ по примеру задания
| kд | Нм/рад/с | 0,0375 | 0,075 | 0,1125 | 0,15 | 0,1875 | 0,225 | 0,2625 |
|
| рад/сек |
Таблица 4.3в – Результаты исследования разгона асинхронным электродвигателем стационарного СХМ по примеру задания
| kд | Нм/рад/с | 0,0375 | 0,075 | 0,1125 | 0,15 | 0,1875 | 0,225 | 0,2625 |
| Mуст | Нм |
По данным таблиц 4.1в – 4.3в строим три графика (рисунок 12).

Рисунок 12 – Результаты исследования разгона асинхронным электродвигателем стационарного СХМ по примеру задания
Таким образом, с увеличением kд время разгона tр увеличивается, установившаяся частота вращения  уменьшается, установившийся крутящий момент Mуст увеличивается.
уменьшается, установившийся крутящий момент Mуст увеличивается.
Контрольные вопросы
1. Охарактеризуйте механические характеристики асинхронного электродвигателя и стационарного сельхозмеханизма.
2. Запишите уравнение разгона сельхозмеханизма.
3. Опишите методы решения дифференциальных уравнений.
4. Как определить по механическим характеристикам возможность разгона сельхозмеханизма и установившиеся значения вращающего момента двигателя, момента сопротивления сельхозмеханизма и частоты вращения?
5. Опишите методику построения модели в Excel.
6. Опишите методику построения схемы модели в пакете Simulink.
7. Опишите методику установления параметров блоков в пакете Simulink.
8. Как проводится установка параметров моделирования.
9. Поясните результаты моделирования.
10. Перечислите и поясните новые функции и блоки в пакете Simulink.
Индивидуальные задания
Таблица 5 – Варианты заданий
| № вар. | Типоразмер электродви- гателя | Параметры электродвигателя | Параметры СХМ | Параметр для исследо-вания | ||||||
| Pн кВт | nо об/мин | Sн | Sк | mк | Mпс Нм | kд Нм/рад/с | Im кгм2 | |||
| 4А71В2У3 | 1,1 | 0,063 | 0,39 | 2,2 | 0,5 | 0,01 | 0,65 | Pн | ||
| 4А80А2У3 | 1,5 | 0,042 | 0,36 | 2,6 | 0,7 | 0,02 | 0,75 | wо | ||
| 4А80В2У3 | 2,2 | 0,043 | 0,38 | 2,6 | 0,03 | 1,2 | Sk | |||
| 4А90L2У3 | 3,0 | 0,043 | 0,33 | 2,5 | 1,5 | 0,04 | 1,9 | mk | ||
| 4А100S2У3 | 4,0 | 0,033 | 0,28 | 2,5 | 0,05 | 2,2 | Mпс | |||
| 4А100L2У3 | 5,5 | 0,034 | 0,29 | 2,5 | 2,5 | 0,06 | 2,3 | kд | ||
| 4А80А4У3 | 1,1 | 0,054 | 0,34 | 2,2 | 0,5 | 0,01 | 0,55 | Im | ||
| 4А80B4У3 | 1,5 | 0,058 | 0,35 | 2,2 | 0,7 | 0,02 | 0,77 | Pн | ||
| 4А90L4У3 | 2,2 | 0,051 | 0,33 | 2,4 | 0,03 | 1,1 | wо | |||
| 4А100S4У3 | 3,0 | 0,044 | 0,31 | 2,4 | 1,5 | 0,04 | 1,8 | Sк | ||
| 4А100L4У3 | 4,0 | 0,046 | 0,32 | 2,4 | 0,05 | 2,1 | mк | |||
| 4А112M4У3 | 5,5 | 0,036 | 0,25 | 2,2 | 2,5 | 0,06 | 2,4 | Mпс | ||
| 4А132S4У3 | 7,5 | 0,029 | 0,20 | 3,0 | 0,07 | 3,2 | kд | |||
| 4А132M4У3 | 0,028 | 0,20 | 3,0 | 0,08 | 5,5 | Im | ||||
| 4А80B6У3 | 1,1 | 0,08 | 0,38 | 2,2 | 0,5 | 0,01 | 0,55 | Pн | ||
| 4А90L6У3 | 1,5 | 0,064 | 0,31 | 2,2 | 0,7 | 0,02 | 0,77 | wо | ||
| 4А100L6У3 | 2,2 | 0,051 | 0,26 | 2,2 | 0,03 | 1,1 | Sk | |||
| 4А112MA6У3 | 3,0 | 0,047 | 0,37 | 2,5 | 1,5 | 0,04 | 1,8 | mk | ||
| 4А112MB6У3 | 4,0 | 0,051 | 0,38 | 2,5 | 0,05 | 2,1 | Mпс | |||
| 4А132S6У3 | 5,5 | 0,033 | 0,36 | 2,5 | 2,5 | 0,06 | 2,4 | kд | ||
| 4А132M6У3 | 7,5 | 0,032 | 0,26 | 2,5 | 0,07 | 3,2 | Im | |||
| 4А160S6У3 | 0,027 | 0,15 | 2,0 | 0,08 | 5,5 | Pн | ||||
| 4А90LB8У3 | 1,1 | 0,07 | 0,27 | 1,9 | 0,5 | 0,01 | 0,55 | wо | ||
| 4А100L8У3 | 1,5 | 0,07 | 0,27 | 1,9 | 0,7 | 0,02 | 0,75 | Sк | ||
| 4А112MA8У3 | 2,2 | 0,06 | 0,23 | 2,2 | 0,03 | 1,15 | mк | |||
| 4А112MB8У3 | 3,0 | 0,058 | 0,35 | 2,2 | 1,5 | 0,04 | 1,75 | Mпс | ||
| 4А132S8У3 | 4,0 | 0,061 | 0,36 | 2,6 | 0,05 | 2,15 | kд | |||
| 4А132M8У3 | 5,5 | 0,041 | 0,25 | 2,6 | 2,5 | 0,06 | 2,45 | Im | ||
| 4А160S8У3 | 7,5 | 0,025 | 0,15 | 2,2 | 0,07 | 3,3 | Pн | |||
| 4А160M8У3 | 0,025 | 0,15 | 2,2 | 0,08 | 5,7 | wо |
Таблица 5б – Варианты заданий
| № вар. | Типоразмер электродви-гателя | Параметр для исследо-вания | Построить графики | ||

| 
| 
| |||
| 4А71В2У3 | Pн | 
| 
| 
| |
| 4А80А2У3 | wо | 
| 
| 
| |
| 4А80В2У3 | Sk | 
| 
| 
| |
| 4А90L2У3 | mk | 
| 
| 
| |
| 4А100S2У3 | Mпс | 
| 
| 
| |
| 4А100L2У3 | kд | 
| 
| 
| |
| 4А80А4У3 | Im | 
| 
| 
| |
| 4А80B4У3 | Pн |
|
|
| |
| 4А90L4У3 | wо |
|
|
| |
| 4А100S4У3 | Sк |
|
|
| |
| 4А100L4У3 | mк |
|
|
| |
| 4А112M4У3 | Mпс |
|
|
| |
| 4А132S4У3 | kд |
|
|
| |
| 4А132M4У3 | Im |
|
|
| |
| 4А80B6У3 | Pн |
|
|
| |
| 4А90L6У3 | wо |
|
|
| |
| 4А100L6У3 | Sk |
|
|
| |
| 4А112MA6У3 | mk |
|
|
| |
| 4А112MB6У3 | Mпс |
|
|
| |
| 4А132S6У3 | kд |
|
|
| |
| 4А132M6У3 | Im |
|
|
| |
| 4А160S6У3 | Pн |
|
|
| |
| 4А90LB8У3 | wо |
|
|
| |
| 4А100L8У3 | Sк |
|
|
| |
| 4А112MA8У3 | mк |
|
|
| |
| 4А112MB8У3 | Mпс |
|
|
| |
| 4А132S8У3 | kд |
|
|
| |
| 4А132M8У3 | Im |
|
|
| |
| 4А160S8У3 | Pн |
|
|
| |
| 4А160M8У3 | wо |
|
|
|
Основная литература
1 Турчак, Л.И. Основы численных методов: учеб. пособие. – 2-е изд. доп. и перераб. / Л.И. Турчак, П.В. плотников. – Москва: Физматлит, 2002. –304 с.
2 Мэтьюз, Д. Численные методы. Использование MATLAB / Д. Мэтьюз, К. Финк. – Москва: Издательский дом Вильямс. – 2001.
3 Дьяконов, В. П. Matlab 6.0 Учебный курс/ Дьяконов В. П. СПб.: Питер. -2001.
4 Основы научных исследований и моделирование. Методические указания по изучению дисциплины и задания для расчетных работ по дисциплине "Основы научных исследований и моделирование ", БГАТУ, Минск, 2007.
Дополнительная литература
1 Гуров, Л.И. Прикладные программы / Л.И. Гуров, С.С. Сахаров. – Москва: Статистика, 1980.
2 Еникеев, Ш.Г. Математическое моделирование биотехнологических процессов / Ш.Г. Еникеев [и др.]. – Казань, 1981.
3 Кафаров, В.В. Принципы математического моделирования химико-технологических систем / В.В. Кафаров, В.А. Петров, В.П. Мешалкин. – Москва: Химия, 1976.
4 Коричко, В.П. Теоретические основы САПР / В.П. Коричко [и др.]. – Москва: Энергоатомиздат, 1987.
5 Котов, И.В. Математическое моделирование макроэкономических процессов / И.В. Котов [и др.]. – Ленинград: Изд-во Ленингр. ун-та, 1980.
6 Краснощеков, П.С. Принципы построения моделей / П.С. Краснощеков, А.А. Петров. – Москва: Изд-во Московского ун-та, 1983.
7 Кроу, К. Математическое моделирование химического производства / К. Кроу. [и др.]. – Москва: Мир, 1973.
8 Любарский, Г.Я. Математическое моделирование и эксперимент / Г.Я. Любарский [и др.]. – Киев: Наук. думка, 1987.
9 Математическое моделирование: сборник статей / Под ред. Дж. Эндрюса и Р. Марк-Лоуна. – Москва: Мир, 1979.
10 Моисеев, Н.Н. Математические задачи системного анализа / Н.Н. Моисеев. – Москва: Наука, 1981.
11 Морозов, К.Е. Математическое моделирование в научном познании / К.Е. Морозов. – Москва: Мысль, 1969.
12 Николаев, В.И. Системотехника: методы и приложения / В.И. Николаев, В.М. Брук. – Ленинград: Машиностроение. Ленингр. отд-ние, 1985.
13 Пакеты прикладных программ. Программное обеспечение вычислительного эксперимента. – Москва: Наука, 1987.
14 Пешель, М. Моделирование сигналов и систем / М. Пешель. – Москва: Мир, 1981.
15 Попов, Ю.П. Вычислительный эксперимент / Ю.П. Попов, А.А. Самарский. – Москва: Знание, 1983. – № 11.
16 Самарский, А.А. Математическое моделирование и вычислительный эксперимент / А.А. Самарский. //Вестник АН СССР. – Москва, 1979. – № 5.– С. 38–49.
17 Скворцов, В.В. Математический эксперимент в теории разработки нефтяных месторождений / В.В. Скворцов. – Москва: Наука, 1970.
18 Смит, Д.М. Математическое и цифровое моделирование для инженеров и исследователей / Д.М. Смит. – Москва: Машиностроение, 1980.
19 Советов, Б.Я. М