В последние годы частотно-регулируемый электропривод все шире начи- нает применяться на объектах нефтегазовой отрасли [1, 2]. Характерной чертой автоматизированного электропривода с частотным управлением является все бо- лее широкое применение асинхронных двигателей. При этом актуальной задачей становится разработка моделей и исследование свойств асинхронных электродви- гателей в условиях их работы при переменной частоте. В статье рассматриваются вопросы создания моделей асинхронных электродвигателей с частотно-токовым управлением с использованием современных пакетов VisSim и Electronics Workbench. Электрическая модель асинхронного двигателя в статическом режиме работы без учета нелинейности кривой намагничивания и потерь в стали опреде- ляется схемой замещения двигателя, показанной на рис. 1
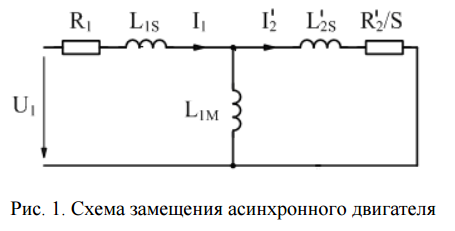
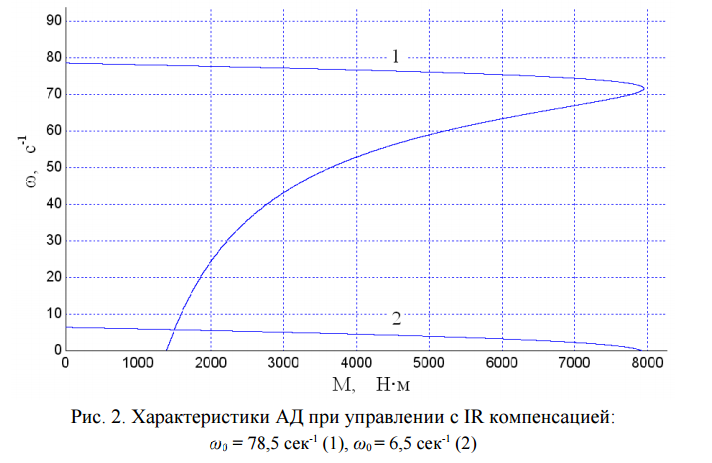
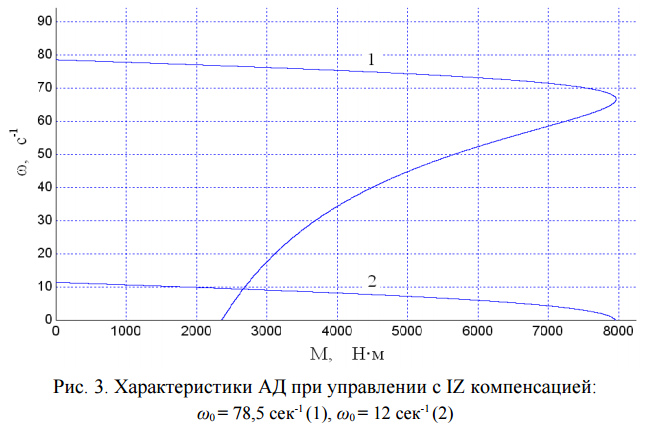
При моделировании используется система уравнений, записанных для схе- мы замещения по второму закону Кирхгофа. Вид уравнений определяется приня- той системой координат. При вращающейся системе координат x-y уравнения состояния принимают вид [3]: u1x=i 1x R1−ω0ψ1 y, 0=i 1 y R1+ω0ψ1x, (1) 0=i2 x ' R2 ' −Sω0ψ2 y, 0=i2 y ' R2 ' +Sω0ψ2 x, (2) где S – скольжение: S=(ω0−ω20)/ω0; (3) ω0, ω20 – угловая скоростью магнитного поля статора и скорость вращения ее ротора как двухполюсной машины; ψ1x,ψ1y, ψ2x и ψ2y – проекции потокосцеплений статора и ротора на оси коорди- нат. Значения потокосцеплений могут быть определены по выражениям: ψ1x=L1 i1 x+L1M i 2x ', ψ1 y=L1 i1 y+L1M i 2 y ', (4) ψ2 x=L2 ' i 2x ' +L1M i 1x, ψ2 y=L2 ' i2 y ' +L1M i1 y, (5) где L1, L2 ' – индуктивность фазы статора и приведенная индуктивность ротора: L1=L1S+L1M, L2 ' =L2S ' +L1M. (6) Индуктивности L1 S, L2S ' и L1M показаны на рис. 1. Электромагнитный момент во вращающейся системе координат х-y [4]: M = 3 2 Z P (ψ1 x i 1 y−ψ1 y i 1x), (7) где ZP – число пар полюсов двигателя. Система уравнений (1) - (7) легко реализуется в блоках моделирующих па- кетов. Такая модель, составленная в блоках пакета VisSim [5, 6], позволяет опре- делять все параметры двигателя при фиксированном скольжении, а также вос- производить его механические характеристики и определять параметры при пере- менной скорости вращения. Модель легко модифицируется, поскольку задавае- мые и результирующие параметры представлены в виде переменных моделирую- щего пакета. Рассмотрим применение модели для исследования свойств двигателя при переменной частоте вращения, например, для анализа работы двигателя при ска- лярном частотном управлении с регулированием напряжения статора. При частот- ном управлении законы управления формируются без учета активного сопротив- ления статора [5]. Это вносит погрешности в соотношение между частотой и нап- ряжением статора. При этом закон регулирования отличается от оптимального, что приводит к снижению показателей регулирования. Для повышения качества регулирования применяются IR компенсация и IZ компенсация [6]. На рис. 2 по- казаны полученные с помощью модели механические характеристики двигателя (ZP = 4), снятые для различных угловых частот напряжения статора при использо- вании IR компенсации при R1=0, а на рис. 3 – при использовании IZ компенса-
ции (R1=0, L1 S=0). Графики, приведенные на рис. 2 и 3, наглядно демонстриру-
ют, что, во-первых, диапазон регулирования скорости вращения двигателя зави-
сит от способа компенсации, и, во-вторых, при любом способе компенсации диа-
пазон регулирования ограничен.
Поэтому целесообразно рассмотреть частотно-токовое управление. В слу- чае скалярного частотного управления с регулировкой тока статора следует учи- тывать, что механические характеристики двигателя при токовом управлении от- личаются от характеристик при управлении напряжением статора. В случае при- менения модели, выполненной в блоках пакета VisSim в соответствии с системой уравнений (1) - (7), для анализа статики электропривода при токовом управлении необходимо стабилизовать ток статора. В реальных системах управления это может быть обеспечено жесткой обратной связью по оку. При моделировании в среде VisSim обратные связи создают алгебраическую петлю. Вместо обратных связей для анализа статики частотно-токового управления в схеме замещения дви- гателя достаточно использовать генератор тока, как показано на рис. 4.

Генератор тока отражает частотно-токовое управление, которое поддержи- вает постоянное потокосцепление ротора в процессе частотного регулирования. Из рис. 4 следуют следующие расчетные соотношения. Электромагнитная мощность двигателя PM = 3 2 I 2 ' 2 R2 ' (1−S) S =M ω20 Z P. (8) Электромагнитный момент M = 3 2 Z P I 2 ' 2 R2 ' Sω0. (9) Приведенный ток ротора ˙ I ' 2= ˙I 1 jω0L1M jω0 L ' 2+R ' 2 / S. (10) Подставляя (10) в (9), получим выражение момента через ток статора M =K I 1 2 1 S /S KP+S KP / S, (11) где критическое скольжение S KP=1/(ω0 τ 2), (12) τ 2=L ' 2 / R2 – постоянная времени ротной цепи;
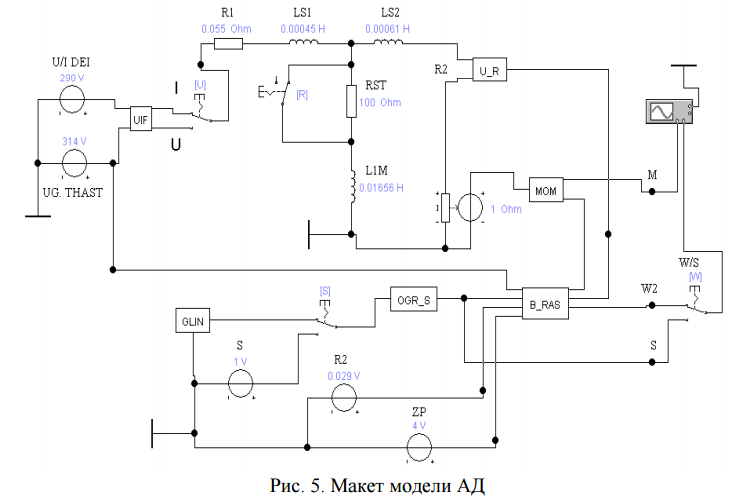
коэффициент K: K= 3 2 Z P L1M 2 L ' 2. (13) Параметры цепи статора в выражении (11) для момента исключены. Это означает, что электромагнитный момент при частотно-токовом управлении со стабилизацией тока по рис. 4 не зависит от параметров обмотки статора и не нуж- дается в компенсации влияния активного сопротивления. Это первое важное пре- имущество частотно-токового управления. Если учесть, что S / S KP=τ 2 (ω0−ω20), (14) то выражение момента (11) приводится к виду M =K KI 2 τ 2 (ω0−ω20), (15) где KI= I 1 √1+τ 2 (ω0−ω20) 2. (16) При частотном управлении функционально следует установить такую за- висимость между током I1 и абсолютным скольжением (ω0 – ω20), чтобы в рабочем диапазоне частот коэффициент KI имел бы постоянное значение. Тогда при посто- янном абсолютном скольжении момент двигателя так же будет постоянным. Диапазон регулирования при токовом управлении без коррекции тока ста- тора несложно определить, исходя из минимально возможного значения частоты ω0, при которой еще обеспечивается критический момент. Из выражения (12): S KP= 1 ω0 τ 2 = ω0−ωKP ω0; (17) ωKP=ω0−τ 2. (18) Минимально возможная частота ω0min, определяется при критической ско- рости ωKP = 0. При этом из (18) получаем ω0min=τ 2. (19) Необходимо заметить, что выражения (9) - (13) позволяют получить сос- тавной блок расчета механической характеристики двигателя при токовом управ- лении в блоках пакета VisSim, но не саму модель. Для исследования статики частотного управления как при регулировке напряжением, так и током статора разработана модель в блоках пакета Electronics Workbench. Макет модели частотного управления показан на рис. 5. В модели установлены: частотный преобразователь напряжения (тока) ста- тора (UIF); блок задания линейно изменяющегося скольжения S (GLIN); блок ограничения скольжения (OGR_S); блок промежуточных расчетов (B_RAS); блок расчета момента (MOM); блок преобразования задаваемого напряжения в сопро- тивление (U_R).
На рис. 6 показаны характеристики, полученные при постоянном токе ста- тора на модели, созданной в блоках пакета Electronics Workbench. С целью сопо- ставления приведены алогичные характеристики двигателя, построенные с помо- щью расчетного составного блока в среде VisSim (рис. 7). Проделанные эксперименты подтверждают работоспособность модели. Следует отметить, что определенным недостатком модели является дискретность формирования значения тока ротора и, следовательно, момента. Модуль тока определяется в блоке MOM в течение одного полупериода его переменного значе- ния как максимальный. Этот недостаток легко устраняется при использовании двухфазной модели