Мурманский морской рыбопромышленный колледж им. И. И. Месяцева
Федерального государственного бюджетного образовательного
Учреждения высшего образования
Мурманский государственный технический университет
(«ММРК им. И.И. Месяцева» ФГБОУ ВО «МГТУ»)
Курсовой проект
По разделу ПМ.01:
«Судовые электроэнергетические системы»
тема:
Комплексная автоматизация судовых электроэнергетических установок
Вариант № 13
Курсанта: Целоусова Николая Сергеевича
Группы: М9-ЭСЭО13о-2
Руководитель: Тёлушкин Д.П.
начальник радиотехнического отделения
Мурманск
Содержание:
Введение…………………………………………………………………………...3
1. Анализ комплексной автоматизации судовых электроэнергетических установок…………………………………………………………………………..4
1.1. Технические средства комплексной автоматизации…………………….…4
1.2. Области применения средств вычислительной техники на судах…...........9
1.3. Примеры построения современных и перспективных КСУ………………11
1.4. Основные принципы построения КСУ……………………..………………15
2. Расчётная часть………………………………………………………………..22
2.1. Аналитический метод……………………………………………………….22
2.2. Таблица нагрузок СЭЭС…………………………………………………….25
Заключение…………………………………………………………………….…26
Список использованной литературы……………………………………………27
Введение.
Тема курсового проекта является комплексная автоматизация судовых электроэнергетических установок.
Актуальность: комплексная автоматизация судовых электроэнергетических установок является практически значимой, поскольку автоматизация судов — это процесс, при котором функции управления судном и его оборудованием, ранее выполнявшиеся человеком, передаются приборам и техническим устройствам. Автоматизация судовождения обеспечивает безопасность рейсов судов. При автоматизации судовых энергетических установок повышается надежность и экономичность работы оборудования, увеличивается производительность и улучшаются условия труда плавсостава, сокращается его численность.
Цель исследования: произвести анализ технических средств комплексной автоматизации судовых электроэнергетических установок.
Задачи:
1. Классифицировать средства комплексной автоматизации на судах.
2. Раскрыть области применения средств вычислительной
техники на судах.
3. Рассмотреть основные принципы построения комплексов средств управления.
Объектом исследования является комплексная автоматизация судовых электроэнергетических установок.
Предмет исследования: процесс изучения комплексной автоматизации на судах, области ее применения и основных принципов построения КСУ.
Метод исследования: теоретический метод.
Анализ (проанализирована различная литература, касающаяся комплексной автоматизации судовых электроэнергетических установок, области их применения и основных принципов их построения).
Анализ комплексной автоматизации судовых электроэнергетических установок.
Технические средства комплексной автоматизации.
Средства автоматизации можно подразделить на две большие группы в зависимости от вида логических связей на устройства жесткой и программируемой логики.
В устройствах жесткой логики материальные связи выполнены в виде соединительных проводников в соответствии с разработанной принципиальной схемой. Такое устройство было традиционным и использовалось для решения как логических, так и функциональных задач.
Высокое качество средств управления с жесткой логикой способствует их широкому внедрению в промышленность. В то же время они имеют недостатки, затрудняющие решение сложных задач управления, особенно гибкого, введение новых функций, решение задач оптимизации процессов, диагностирования и ремонта.
Устройства программируемой логики лишены этих недостатков. К ним относятся микропроцессоры и построенные на их основе микроЭВМ и программируемые контроллеры.
Рассмотрим, чем различаются ЭВМ, микроЭВМ, управляющие микроЭВМ и программируемые контроллеры.
Основным элементом ЭВМ является центральный процессор (ЦП), предназначенный для выполнения операций обработки данных. В состав ЦП входят процессор, запоминающее устройство и схемы соединения.
Процессор — устройство запрограммированной обработки информации в ЭВМ. Он состоит из арифметико-логического устройства (АЛУ), набора регистров, устройства управления (УУ) и шин сопряжения. АЛУ — основной операционный блок. Процессор реализует алгоритм, описание которого хранится в блоке памяти, внешнем по отношению к процессору. Каждая операция в процессоре управляется соответствующей микро-
Микропроцессор (МКП) — центральный процессор; является основной частью микроЭВМ, реализованный средствами интегральной технологии в одной или нескольких больших интегральных схемах (БИС). Микропроцессор, так же, как и процессор, предназначен для выполнения программно-управляемых, арифметических и логических операций; содержит АЛУ и УУ, регистры и шины ввода-вывода информации. Осуществляет прием, обработку и выдачу цифровой информации.
Микропроцессорные комплекты (комплект БИС, комплект микросхем) — совокупность микропроцессорных и других микросхем, совместимых по конструктивно-технологическому исполнению и предназначенных для совместного использования при построении микропроцессоров, микроЭВМ, контроллеров и других средств вычислительной техники.
МикроЭВМ — универсальная цифровая вычислительная машина, состоящая из МКП и других интегральных микросхем: постоянных запоминающих устройств (ПЗУ), запоминающих устройств (ЗУ) с произвольным доступом и иногда из одного или нескольких устройств ввода-вывода информации. Как любая ЭВМ, микроЭВМ представляет собой комплекс технических средств и программного обеспечения, способный реализовать любой алгоритм, оформленный в виде программы, которая хранится в памяти, и ориентирована на реализацию процессов переработки информации во взаимодействии с пользователем.
Возможность взаимодействия с человеком-пользователем — принципиальное отличие ЭВМ. Средства взаимодействия включают в себя клавиатуру, дисплей либо печатающее устройство.
Универсальная ЭВМ способна решить любую задачу, представленную в требуемой для этого форме, причем пользователь может наращивать память практически безгранично.
МикроЭВМ выполнены на элементах БИС.
Микропроцессорная система (МКПС) — управляющая, информационная или иная специализированная цифровая система, построенная на базе микропроцессорных средств, включающая микроЭВМ, средства сопряжения с объектом, память и используемая для реализации единого процесса преобразования информации. Обычно выполняет ограниченный набор программ, хранящихся в блоке постоянной памяти.
Управляющая микроЭВМ — разновидность ЭВМ, предназначенных для специального использования при автоматизации различных процессов и построенные на элементах БИС. По основным выполняемым функциям управляющие микроЭВМ подразделяются на ЭВМ контроля, управления технологическими процессами, управления производством. Выполняют в большей степени логические операции нежели вычислительные.
При работе управляющих микроЭВМ требуются специальные аппаратные устройства (периферийные устройства), которые согласуют между вычислительным устройством и технологическим процессом виды энергии и уровни мощностей, а также функциональные принципы (форма сигналов процесса в большинстве случаев аналоговая, в вычислительном устройстве — цифровая).
В управляющих микроЭВМ периферийные устройства часто весьма просты и приспособлены для решения специальных задач; скорость обработки данных позволяет работать в реальном масштабе времени. Такая обработка данных в реальном масштабе времени требует специального программирования.
Управляющая ЭВМ — это цифровое вычислительное устройство с периферийными устройствами для приема данных процесса и выдачи команд, которая обрабатывает данные процесса в реальном масштабе времени, гибко программирует их для решения различного рода задач.
Программируемый контроллер (ПК) (микроконтроллер) представляет собой устройство переработки информации, предназначенное для работы с конкретной ТС. Функцией ПК является реализации алгоритмов управления машиной, механизмом, прибором, электроприводом и т.п. (рисунок 1.1). ПК управляет одним или несколькими процессами, для реализации каждого из которых в общем случае необходимо контролировать, поддерживать в заданных пределах или обеспечивать изменение по заданному закону целой группы параметров.
Результаты измерения параметров по каналам связи передаются к контроллеру. Длина каналов связи может изменяться от нескольких сантиметров (характерно для судовых КСУ) до нескольких сотен километров. В первом случае контроллер встроен в машину, и канал связи в этом случае представляет собой просто соединительные проводники. Во втором случае имеет место система телеуправления.
При подключении каналов связи к процессору контроллера необходимо выполнить:
1) электрическую изоляцию выводов БИС контроллера от канала связи во избежание паразитных электрических потенциалов — помех, приводящих к сбоям в его работе. С этой целью каналы связи изолируются от контроллеров с помощью оптронов, представляющих собой размещенные в одном корпусе светодиод и фототранзистор. При поступлении электрического сигнала по каналу связи светодиод начинает светиться и переводит фототранзистор в проводящее состояние (рисунок 1.2). Наличие оптронных средств электрической изоляции - одна из важных особенностей контроллеров;
2) преобразование аналоговых сигналов в цифровую форму с помощью аналого- цифровых преобразователей (АЦП);
3) заданную последовательность опроса точек, в которых измеряются параметры.

Рисунок 1.1 - Структура управления с применением программируемого контроллера. Здесь ПК — программируемый контроллер; ЦАП — цифроаналоговый преобразователь; АЦП — аналоговый цифровой преобразователь; УО — управляемый объект; хзд — аналоговый задающий сигнал; gu — цифровой задающий сигнал; u —сигнал управления

Рисунок 1.2 - Оптронная электрическая развязка
Контроллер по программе сравнивает измеренные значения параметров с их заданными значениями и в зависимости от результата сравнения вырабатывает управляющие сигналы, которые могут быть преобразованы в аналоговую форму с помощью ЦАП.
Выводы контроллеров, на которых действуют цифровые сигналы, соединяются с каналами связи через оптронные устройства электрической изоляции. По каналам связи управляющие сигналы поступают к исполнительным органам, воздействующим на ход процесса.
Программное обеспечение контроллеров специфично. В его памяти в общем случае может храниться большое число заранее известных программ, которые составляются и вводятся в контроллер в процессе проектирования и наладки системы, в период ремонта судна.
Операционные системы и внутреннее программное обеспечение, как правило, полностью отсутствуют или же представлены в минимальной степени, поскольку все режимы работы известны заранее. Практически все ресурсы контроллера могут быть направлены на выполнение его внешних функций. В этом также коренное отличие контроллеров от ЭВМ вообще и от микроЭВМ в частности.
Другая особенность программного обеспечения контроллеров состоит в том, что хранящийся в памяти комплект программ обновляется только в исключительных случаях, например, когда меняется технологический процесс управления. Поэтому для хранения программ используются постоянные запоминающие устройства (ПЗУ) и перепрограммируемые запоминающие устройства (ППЗУ). Хранение программ в ПЗУ и ППЗУ существенно повышает надежность работы систем, так как хранящаяся информация не искажается при отключении питания или под воздействием сильных электрических или магнитных полей.
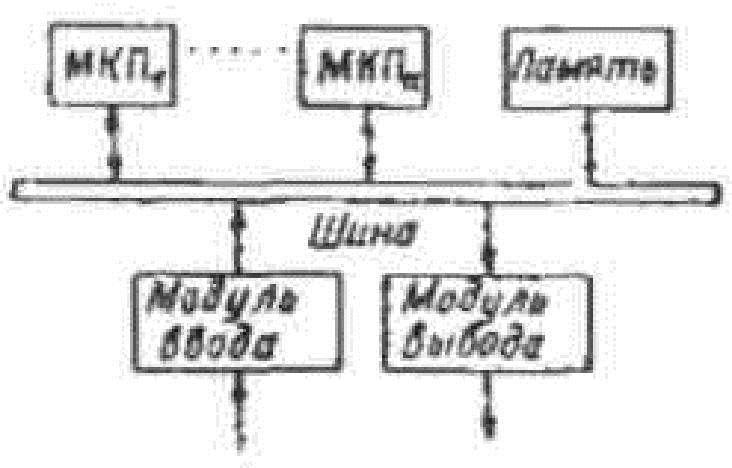
Рисунок 1.3 - Структура многопроцессорной системы
Следует отметить, что в состав контроллера могут входить устройства обмена информацией с человеком-оператором. Чаще всего они обеспечивают сигнализацию о ходе процесса или отсчета (средство печати). Обмен контроллера с оператором имеет вспомогательный характер. Так же, как и управляемая ЭВМ, контроллер работает в реальном масштабе времени. Это означает, что операции по переработке информации в нем должны происходить в том же темпе, в каком она поступает и в каком она должна потребляться в целях управления. Решающими факторами для обеспечения работы контроллера в реальном масштабе времени является применение быстродействующих процессоров, а также специального программного обеспечения. Как показала практика, применение принципа децентрализованного (распределенного) управления при построении МКП САУ становится все более оправданным технически и экономически. Для увеличения производительности, надежности и гибкости СУ на базе МКП применяют МКПС (рисунок 1.3) с параллельной организацией их работы. Такое построение систем позволяет реализовать одновременное выполнение команд или программ или подпрограмм.