Для лучшего использования трансформаторов при параллельной работе необходимо нагрузки распределять между ними прямо пропорционально их номинальным мощностям. Это достигается тождественностью групп соединения обмоток, равенством в пределах допусков соответственно номинальных первичных и вторичных напряжений, а также равенством в пределах допусков напряжений короткого замыкания.
Нарушение первого условия вызывает появление больших уравнительных токов между обмотками трансформаторов, которые приводят к быстрому чрезмерному их нагреву. Требование равенства соответственно номинальных первичных и вторичных напряжений сводится к установлению равенства коэффициентов трансформации, которые не должны отличаться друг от друга более чем на ±0,5 % их среднего значения во избежание недопустимых уравнительных токов обмоток трансформаторов.
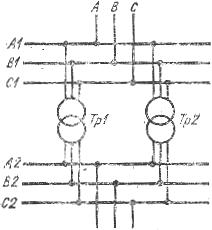
Схема включения трехфазных трансформаторов для параллельной работы
Различие между напряжениями короткого замыкания трансформаторов при параллельной работе допускают до ±10 % их среднего значения, так как неравенство этих величин вызывает перегрузку тех трансформаторов, у которых напряжение короткого замыкания имеет меньшее значение. Помимо этого, рекомендуется, чтобы отношение номинальных мощностей параллельно работающих трансформаторов не превышало 3: 1.
При параллельном включении трехфазных трансформаторов нужно, чтобы их одноименные зажимы были присоединены к одному и тому же проводу сети, а перед первоначальным включением проведена фазировка, т. е. проверка соответствия по фазе вторичных э. д. с. при подключении первичных обмоток к общей сети.
33. Сварочный трансформатор — трансформатор, предназначенный для различных видов сварки.
Сварочный трансформатор преобразует напряжение сети (220 или 380 В) в низкое напряжение, а ток из низкого - в высокий, до тысяч ампер.
Сварочный ток регулируется благодаря изменению величины либо индуктивного сопротивления, либо вторичного напряжения холостого хода трансформатора, что осуществляется посредством секционирования числа витков первичной или вторичной обмотки. Это обеспечивает ступенчатое регулирование тока.
Сварочные трансформаторы классифицируются следующим образом:
1. По количеству обслуживаемых рабочих мест
2. По фазности напряжения в сети: однофазные, трехфазные.
3. По конструкции: с регулировкой вторичного напряжения магнитным рассеянием, регулировкой переключением количества витков,
с регулируемым выходным напряжением посредством дросселя насыщения.
А́втотрансформа́тор — вариант трансформатора, в котором первичная и вторичная обмотки соединены напрямую, и имеют за счёт этого не только магнитную связь, но и электрическую. Обмотка автотрансформатора имеет несколько выводов (как минимум 3), подключаясь к которым, можно получать разные напряжения.
Преимуществом автотрансформатора является более высокий КПД, поскольку лишь часть мощности подвергается преобразованию — это особенно существенно, когда входное и выходное напряжения отличаются незначительно. Недостатком является отсутствие электрической изоляции (гальванической развязки) между первичной и вторичной цепью. В промышленных сетях, где наличие заземления нулевого провода обязательно, этот фактор роли не играет, зато существенным является меньший расход стали для сердечника, меди для обмоток, меньший вес и габариты, и в итоге — меньшая стоимость.
Распространены аббревиатуры:
1. ЛАТР — Лабораторный АвтоТрансформатор Регулируемый.
2. РНО — Регулятор Напряжения Однофазный.
3. РНТ — Регулятор Напряжения Трёхфазный.
34. Принцип действия синхронного генератора
При помощи первичного двигателя ротор-индуктор вращается. Магнитное поле находится на роторе и вращается вместе с ним, поэтому скорость вращения ротора равна скорости вращения магнитного поля – отсюда название синхронная машина.

Рис.6. Генераторный режим работы синхронной машины.
При вращении ротора магнитный поток полюсов пересекает статорную обмотку и наводит в ней ЭДС по закону электромагнитной индукции: E = 4,44*f*w*kw*Ф, где:
f – частота переменного тока, Гц; w – количество витков; kw – обмоточный коэффициент; Ф – магнитный поток.
Частота индуктированной ЭДС (напряжения, тока) синхронного генератора: f = p*n/60, где:
р – число пар полюсов; п – скорость вращения ротора, об/мин.
Заменив: E = 4,44*(п*р/60)*w*kw*Ф и, определив: 4,44*(р/60)*w*kw – относится к конструкции машины и создаёт конструктивный коэффициент: C = 4.44*(р/60)*w*kw.
Тогда: Е = СЕ*п*Ф.
Таким образом, как и у любого генератора, основанного на законе электромагнитной индукции, индуктированная ЭДС пропорциональна магнитному потоку машины и скорости вращения ротора.
35. Синхронный двигатель. Принцип действия и устройство. Синхронный двигатель может работать в качестве генератора и двигателя. Синхронный двигатель выполнен так же, как и синхронный генератор. Его обмотка якоря I (рис. 291, а) подключена к источнику трехфазного переменного тока; в обмотку возбуждения 2 подается от постороннего источника постоянный ток. Благодаря взаимодействию вращающегося магнитного поля 4, созданного трехфазной обмоткой якоря, и поля, созданного обмоткой возбуждения, возникает электромагнитный момент М (рис. 291,б), приводящий ротор 3 во вращение. Однако в синхронном двигателе в отличие от асинхронного ротор будет разгоняться до частоты вращения n = n1, с которой вращается магнитное поле (до синхронной частоты вращения). Объяс-
 Рис. 291. Электрическая (а) и электромагнитная (б) схемы синхронного электродвигателя
Рис. 291. Электрическая (а) и электромагнитная (б) схемы синхронного электродвигателя
няется это тем, что ток в обмотку ротора подается от постороннего источника, а не индуцируется в нем магнитным полем статора и, следовательно, не зависит от частоты вращения вала двигателя. Характерной особенностью синхронного двигателя является постоянная частота вращения его ротора независимо от нагрузки.
Электромагнитный момент. Электромагнитный момент в синхронном двигателе возникает в результате взаимодействия магнитного потока ротора (потока возбуждения Фв) с вращающимся магнитным полем, создаваемым трехфазным током, протекающим по обмотке якоря (потоком якоря Фв). При холостом ходе машины оси магнитных полей статора и ротора совпадают (рис. 292,а). Поэтому электромагнитные силы I, возникающие между «полюсами» статора и полюсами ротора, направлены радиально (рис. 292, б) и электромагнитный момент машины равен нулю. При работе машины в двигательном режиме (рис. 292, в и г) ее ротор под действием приложенного к валу внешнего нагрузочного момента Мвн смещается на некоторый угол 0 против направления вращения. В этом случае в результате электромагнитного взаимодействия между ротором и статором создаются электромагнитные силы I, направленные по направлению вращения, т. е. образуется вращающий электромагнитный момент М, который стремится преодолеть действие внешнего момента Мвн. Максимум момента Мmax
соответствует углу? = 90°, когда оси полюсов ротора расположены между осями «полюсов» статора.
Если нагрузочный момент Мвн, приложенный к валу электродвигателя, станет больше Мmax, то двигатель под действием внешнего момента Мвн останавливается; при этом по обмотке якоря неподвижного двигателя будет протекать очень большой ток. Этот режим называется выпаданием из синхронизма, он является аварийным и не должен допускаться.
При работе машины в генераторном режиме (рис. 292, д и е) ротор под действием приложенного к валу внешнего момента Мвн смещается на угол? по направлению вращения. При этом создаются электромагнитные силы, направленные против вращения, т. е. образуется тормозной электромагнитный момент М. Таким образом, при изменении значения и направления внешнего момента на валу ротора Мвн изменяется лишь угол? между осями полей статора и ротора, в то время как в асинхронной машине в этом случае изменяется частота вращения ротора.
Пуск в ход и регулирование частоты вращения. Синхронный двигатель не имеет начального пускового момента. Если подключить обмотку якоря к сети переменного тока, когда ротор неподвижен, а по обмотке возбуждения проходит постоянный ток, то за один период изменения тока электромагнитный момент будет дважды менять свое направление, т. е. средний момент за период будет равен нулю. Следовательно, для пуска в ход синхронного двигателя необходимо разогнать его ротор с помощью внешнего момента до частоты вращения, близкой к синхронной. Для этой цели применяют метод асинхронного пуска. Синхронный двигатель пускают в ход как асинхронный, для чего его снабжают специальной короткозамкнутой пусковой обмоткой 3 (рис. 293). В полюсные наконечники ротора 2 синхронного двигателя закладывают медные или латунные стержни, замкнутые накоротко двумя торцовыми кольцами. Пусковая обмотка выполнена подобно беличьей клетке асинхронной машины, но занимает лишь часть окружности ротора. В некоторых двигателях специальная короткозамкнутая обмотка
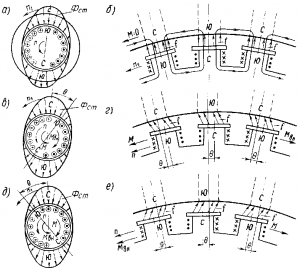 Рис. 292. Электромагнитный момент в синхронной машине, образующийся в различных режимах
Рис. 292. Электромагнитный момент в синхронной машине, образующийся в различных режимах
 Рис. 293. Схема асинхронного пуска синхронного двигателя;
Рис. 293. Схема асинхронного пуска синхронного двигателя;
Рис. 294 Устройство пусковой обмотки синхронного двигателя: 1 — ротор; 2 — стержни; 3 — кольцо; 4 — обмотка возбуждения
36. Принцип действия асинхронного двигателя. Трехфазные асинхронные двигатели являются самыми распространенными электрическими двигателями и применяются для привода различных станков, насосов, вентиляторов, компрессоров, грузоподъемных механизмов, а также на э. п. с. переменного тока в качестве двигателей вспомогательных машин..
Асинхронный двигатель состоит из неподвижной части статора 1 (рис. 248, а), на котором расположены обмотка 2 статора, и вращающейся части — ротора 3 с обмоткой 4. Между ротором и статором имеется воздушный зазор, который для улучшения магнитной связи между обмотками делают по возможности малым. Обмотка 2 статора представляет собой трехфазную или в общем случае многофазную обмотку, катушки которой размещают равномерно вдоль окружности статора. Фазы этой обмотки А-Х, B-Y и C-Z размещены равномерно по окружности статора; они соединяются «звездой» (рис. 248,б) или «треугольником» и подключаются к сети трехфазного тока. Обмотку 4 размещают равно-
 Рис. 248. Электромагнитная схема асинхронного двигателя (а), схема включения его обмоток (б) и пространственное распределение вращающего магнитного поля (в) в двухполюсной машине
Рис. 248. Электромагнитная схема асинхронного двигателя (а), схема включения его обмоток (б) и пространственное распределение вращающего магнитного поля (в) в двухполюсной машине
мерно вдоль окружности ротора. При работе двигателя она замкнута накоротко.
При подключении обмотки статора к сети создается синусоидально распределенное вращающееся магнитное поле 5 (рис. 248, в). Оно индуцирует в обмотках статора и ротора э. д. с. e1 и е2. Под действием э. д.с. е2 по проводникам ротора будет проходить электрический ток i2. На рис. 248, а показано согласно правилу правой руки направление э. д. с. е2, индуцированной в проводниках ротора при вращении магнитного потока Ф, по часовой стрелке (при этом проводники ротора перемещаются относительно потока Ф против часовой стрелки). Если ротор неподвижен или частота его вращения п меньше синхронной частоты n1, активная составляющая тока ротора совпадает по фазе с индуцированной э. д. с. е2, при этом условные обозначения (крестики и точки) показывают одновременно и направление активной составляющей тока i2.
На проводники с током, расположенные в магнитном поле, действуют электромагнитные силы, направление которых определяется правилом левой руки. Суммарная сила Fрез, приложенная ко всем проводникам ротора, образует электромагнитный момент М, увлекающий ротор за вращающимся магнитным полем. Если этот момент достаточно велик, то ротор приходит во вращение и его установившаяся частота вращения соответствует равенству электромагнитного момента М тормозному, приложенному к валу от приводимого во вращение механизма и внутренних сил трения.
Э.д.с, индуцированная в проводниках обмотки ротора, зависит от частоты их пересечения вращающимся полем, т. е. от разности частот вращения магнитного поля n1 и ротора n. Чем больше разность n1— n, тем больше э. д. с. е2. Следовательно, необходимым условием для возникновения в асинхронной машине электромагнитного вращающего момента является неравенство частот вращения n1 и n. Только при этом условии в обмотке ротора индуцируется э. д. с. и возникает ток i и электромагнитный момент М. По этой причине машина называется асинхронной (ротор ее вращается несинхронно с полем). Иногда ее называют индукционной ввиду того, что ток в роторе возникает индуктивным путем, а не подается от какого-либо внешнего источника.
Для характеристики отставания частоты вращения ротора двигателя от частоты вращения магнитного поля служит скольжение, его выражают в относительных единицах или процентах:
s = (n1— n) /n1 или s = [(n1— n) /n1] 100% (81)
Если, например, четырехполюсный двигатель имеет s = 4%, то частота вращения его ротора равна 1440 об/мин (частота вращения поля при частоте 50 Гц составляет 1500 об/мин, а отставание ротора от частоты поля равно 4 % от 1500 об/мин, т. е. 60 об/мин). В двухполюсном двигателе при s = 4% частота вращения ротора составляет 2880 об/мин (3000—0,04*3000 = 2880).
Частота вращения ротора, выраженная через скольжение,
n = n1(1 – s) (82)
По своей конструкции различают двигатели с фазным ротором (с контактными кольцами) и с короткозамкнутым ротором. Они имеют одинаковую конструкцию статора и отличаются выполнением ротора. Пусковые свойства этих двигателей различны.
37. Обмотка этого типа, показанная на фиг. 36, состоит из секций равной ширины, причем секционные стороны этой обмотки располагаются в два слоя, как в барабанных обмотках машин постоянного тока. На фиг. 36 показана обмотка, ширина секций которой равна полюсному делению.
Американские заводы часто выполняют эту обмотку с большим укорочением шага. Выгода такого укорочения шага заключается в следующем:
1. Сокращаются аксиальные размеры машины.
2. Уменьшается реактанц магнитного рассеяния торцевых частей обмотки.
Отдельные секции этой обмотки обычно изготовляются на шаблонах и после пропитки секций закладываются в пазы статора, которые выполняются в этом случае открытого типа.
В этих так называемых американских обмотках уменьшается не только реактанц торцевых частей, но также и реактанц паза; последнее вызвано тем, что в каждом пазу этой обмотки находятся провода разных фаз.
Вес меди при таких обмотках в общем получается меньше, чем при других типах обмоток, и в среднем в отдельных случаях может достигать 10% и выше; причина этого лежит в сокращении шага и длины торцевых частей обмотки. При этой обмотке кривая магнитной индукции приближается весьма близко к синусоиде, вследствие чего добавочные потери от высших гармонических поля здесь понижаются почти до нуля.
В однослойных обмотках каждая сторона катушки полностью заполняет паз сердечника статора (см. рис. 8.1, б). При этом число катушечных групп в каждой фазе равно числу пар полюсов, так что общее число катушечных групп в однослойной обмотке равно рm1.
Однослойные обмотки статоров разделяют на концентрические и шаблонные. В концентрической обмотке катушки каждой катушечной группы имеют разную ширину и располагаются концентрически. Шаги обмотки у катушек, входящих в катушечную группу, неодинаковы, но их среднее значение y1cp = Z1/ (2р).
Так, для трехфазной однослойной концентрической обмотки с Z1 = 24; 2р = 4 имеем у1ср=24/4 = 6 пазов; q1 =Zl/ (2pm1) = 24/ (4 • 3) = 2. Следовательно, катушечная группа каждой фазной обмотки состоит из двух расположенных концентрически катушек. Шаги этих катушек: у11 = 7 и у12 = 5. Развернутая схема этой обмотки (2р = 4; Z1 = 24; q1 = 2; у1ср = 6)
38.
1. Режим двигателя;
2. Режим генератора;
3. Режим электромагнитного тормоза;
4. Режим динамического торможения;