Датчики угла поворотаа.
Визирная линия реализует датчик на основе отверстия в экране - диске, насаженном на вал. Избирательность метода ниже, чем у магнитных датчиков из-за рассеяния света простыми источниками (кроме лазера). Это можно скомпенсировать, введя зону нечувствительности фотоприемника.

Датчик давления.

А Б
Рис. А - оптический преобразователь мембранного датчика давления.
Оптические датчики в автоэлектронике.
Все известные оптические (и многие неоптические) схемы детектирования движения сводятся к двум базовым схемам, показанным на рис. 73, 74. Схемы работы устройств проиллюстрированы рис. 75 [165–166].

Рис. Базовая схема оптического детектирования движения — прерыватель а–в — щелевой оптический (фотоэлектрический) датчик — оптопрерыватель (оптрон или оптопара): 1 — корпус датчика; 2 — светодиод; 3 — фоточувствительный элемент (фототранзистор или фотодиод); а — конструкция датчика: 4 — элементы для монтажа корпуса; 5 — терминалы для монтажа на печатной плате; б — линейный прерыватель — датчик линейной скорости (цифровой индикации определенного линейного положения): 4 — линейный ротор (линейно перемещающийся элемент) с чередующимися оптически прозрачными и оптически непрозрачными участками; 5 — терминалы для монтажа на печатной плате; в — датчик угловой скорости (индикации определенного углового положения); 4 — вращающийся ротор — крыльчатка с непрозрачными лопастями; 5 — вращающийся вал; г — аналог оптопрерывателя — щелевой датчик скорости Холла: 1 — корпус датчика; 2 — магнит; 3 — датчик Холла (униполярный ключ); 4 — магнитопровод; 5 — терминалы для монтажа на печатной плате; 6 — вращающийся ротор — крыльчатка с лопастями из ферромагнитного материала; 7 — вращающийся вал.
Рис. а–в демонстрируют принцип работы типичного щелевого оптического переключателя-оптопрерывателя, или оптрона. В пластмассовом корпусе расположены светодиод и фотодетектор, например фототранзистор, разделенные воздушным зазором в теле корпуса. Свет от светотодиода попадает на фототранзистор, который переходит в состояние насыщения. Если в зазоре появляется непрозрачный элемент — ротор, путь света между светодиодом и фототранзистором блокируется, что вызывает переключение выхода фототранзистора к высокому уровню.
Излучающие светодиоды могут функционировать как в видимом, так и в инфракрасном спектре. Для работы датчика необходимо, чтобы конструкция корпуса и ширина элементов ротора обеспечивали чередование светопередачи и перекрытия оптического канала. Существенно уменьшить ширину оптических кодовых элементов и повысить разрешение устройства позволяют лазерные диоды. Расстояние от датчика до детектируемого объекта в пределах ширины рабочего зазора несущественно, но если необходим больший рабочий диапазон, также применяются лазерные светодиоды.
Простейшим примером может служить проверка с помощью оптического оптопрерывателя открытия или закрытия двери или капота, которые для блокировки света снабжаются подвижным флагом, падающим в щель, более сложным — в энкодерах (будет рассмотрено далее).
Щелевые оптопрерыватели широко используются для детектирования скорости двигателя, на валу которого размещен ротор, периодически блокирующий оптический канал, но в автоэлектронике их применение ограничено чувствительностью к загрязнениям и температурам (обычно 80 °C). Необходимо отметить, что некоторые современные устройства, например инфракрасные диоды и фототранзисторы Honeywell, работают и при температурах до 125 °C.
В значительной степени проблему также решает интерпретация схемы прерывателя на основе датчика Холла (рис. г), но, в отличие от оптопрерывателя, к размерам крыльчатки предъявляются требования минимальной ширины лопасти, что в свою очередь ограничивает пространственное разрешение датчика.

Рис. Оптический (фотоэлектрический) датчик рефлективного типа 1 — корпус датчика; 2 — светодиод; 3 — фоточувствительный элемент (фототранзистор или фотодиод); 4 — терминалы для монтажа на печатной плате; а — конструкция датчика; б — датчик линейной скорости (индикации определенного линейного положения): 5 — линейный ротор с чередующимися участками с высокой отражательной способностью и низкой отражательной способностью (оптически прозрачными); в — датчик угловой скорости (индикации определенного углового положения); 5 — вращающийся ротор — крыльчатка с чередующимися участками с высокой отражательной способностью и низкой отражательной способностью (оптически прозрачными); 6 — вращающийся вал; г — датчик угловой скорости со специальной конструкцией ротора: 5 — вращающийся ротор с низкой отражательной способностью фона (черного цвета); 6 — чередующиеся полосы ротора с высокой отражательной способностью; 7 — вращающийся вал.
На рис. а–г проиллюстрирована работа рефлективного оптического датчика, который функционирует аналогично, но конструктивно отличается тем, что фототранзистор в рефлективном датчике переключается светом, отраженным от детектируемой поверхности.
Светодиод и фототранзистор рефлективного датчика расположены с одной стороны поверхности детектируемого объекта. Рефлективные датчики обеспечивают большую гибкость монтажа, но характеризуются фокусным расстоянием (оптимальным расстоянием от датчика до детектируемого объекта), на котором он должен быть помещен (обычно в пределах 2,54–12,7 мм) и относительно которого варьируется рабочий диапазон устройства.
При конструировании рефлективного датчика важнейшим требованием к детектируемой поверхности является ее отражательная способность и качество отражения. Например, для задач детектирования скорости цвет вала двигателя и ротора выбирается черный (рис. 74г), тогда полосы отражающего материала на валу обеспечивают периодическое переключение датчика.
Луч, отраженный от стандартной поверхности, не сфокусирован и представляет собой усеченный конус с основанием на рефлективной поверхности, образованным отражаемым коническим световым пучком светодиода, что не позволяет с высокой точностью обнаруживать малые отражающие объекты и ограничивает пространственное разрешение датчика. Для того чтобы уменьшить диаметр отражаемого луча, в качестве источников света применяются лазерные светодиоды, а для фокусировки луча на его пути от светодиода к фотодетектору в датчик встраиваются линзы.
Производным от рефлективного типа датчиков является волоконно-оптический датчик перемещения, содержащий две группы волоконной оптики: передающие волокна, подключенные к источнику света, и принимающие сигнал волокна, которые подсоединены к фотодетектору (фотодиоду) и объединены в одном корпусе. Свет от источника передается через оптоволокна на поверхность цели и отражается обратно, часть отраженного света улавливается принимающими оптоволокнами и попадает на фотодетектор, регистрирующий интенсивность отражения, которая представляет собой нелинейную функцию свойств поверхности и расстояния до цели. Этот тип датчиков может потребовать периодической калибровки.
Рефлективные датчики используются во многих сферах — в промышленности или компьютерах (датчики для компьютерных мышей). В автоэлектронике данный тип устройств применяется достаточно широко — например, для контроля положения пассажира, в датчиках дождя и в энкодерах, а кроме того, становится базовой схемой, интересной для преобразования измерительных концепций по отношению к другим типам датчиков.
Особенности схемотехники оптических устройств
Оптический датчик — это устройство, измеряющее интенсивность электромагнитных волн в диапазоне от ультрафиолетового до близкого к инфракрасному.
Свет представляет собой пучок дискретных фотонов, каждый из них является носителем кванта энергии, зависящей от источника света.
При взаимодействии с атомами кремния фотоны, в зависимости от длины волны (что эквивалентно количеству энергии), увеличивают проводимость фотодиода. В нем при смещении генерируется электрический ток, и его можно измерить.
С физической точки зрения базовое измерительное устройство — это именно фотодиод, который при объединении с функциональной электроникой будет представлять собой пиксель (pixel — PIcture ELement).
Другой базовый тип фотодетектора — фототранзистор, под действием света он функционирует аналогично, но обеспечивает переключаемый логический выход.
Фотодиоды и фототранзисторы закладываются в линейные оптические массивы, CMOS-камеры.
Щелевые и рефлективные датчики (а также оптоизоляторы1) функционируют одинаково с идентичными характеристиками, важнейшей из которых является коэффициент передачи тока.
Поскольку фототранзистор, при воздействии светового луча переходящий в состояние насыщения, обеспечивает готовый цифровой выход, в большинстве коммерчески доступных оптопрерывателей и рефлективных датчиков используется именно данный тип фотоэлектрического преобразователя. Для включения датчика во внешнюю цифровую схему потребуется только токоограничивающий резистор в цепи светодиода и внешний резистор между плюсом питания и выходом транзисторного ключа (рис. а).

Рис. Типичные принципиальные электрические схемы для включения оптопрерывателя и рефлектора а— схема на основе фототранзистора с цифровым выходом; б— схема на основе фотодиода с аналоговым импульсным выходом; в— схема на основе фотодиода с цифровым импульсным выходом; VD1 — светодиод; VD2 — фотодиод; VT1 — фототранзистор, R1, R2 — токоограничивающие резисторы.
Пара «светодиод–фототранзистор» характеризуется усилением менее 1. Сумма выходного тока коллектора фототранзистора, отнесенная к величине входного тока светодиода, называется коэффициентом передачи тока (КПТ, или CTR — Current transmission ratio). Типичный ток светодиода 10–20 мА с типичным CTR щелевого переключателя порядка 0,1 соответствует 1–2 мА выходного тока коллектора 2.
КПТ зависит от характеристик светодиода и фототранзистора и различен для оптических датчиков в широких пределах, поэтому значение резистора R2 должно гарантировать насыщение фототранзистора и стекание тока, достаточного для получения действительных амплитуд логических уровней при подключении оптического датчика к микроконтроллеру. Например, при токе светодиода 10мА и КПТ=0,1 значение резистора R2 должно быть выбрано приближенно равным 5 кОм [166]. (Меньшее значение допустимо для оптического переключателя с высоким КПТ или с большим током светодиода и будет обеспечивать лучшую шумовую устойчивость (меньший импеданс) и более высокую скорость переключения.)
Скорость переключения фототранзистора в любом оптическом датчике довольно медленная, что ограничивает максимальную детектируемую скорость устройства и должно учитываться программой, считывающей выход датчика. Типичные значения времени включения (перехода в состояние насыщения) — 8 мс, времени выключения — 50 мс.
Рефлективные датчики также характеризуются КПТ, который в отличие от оптопрерывателей не постоянен и зависит от силы отраженного света, типа поверхности и расстояния от поверхности до датчика. КПТ рефлективного датчика специфицируется производителем со стандартной белой рефлективной поверхностью, помещенной на фокусном расстоянии от датчика. В реальном проекте вычисляется или измеряется фактический КПТ.
Поскольку КПТ рефлективного оптического датчика варьируется в широком диапазоне, аналоговый выход (рис. 75б) может быть более предпочтительным, поскольку пользователю предоставляется возможность самостоятельно подсоединять выход датчика к АЦП и программно отслеживать изменения в выходном уровне сигнала, что, как показано далее, полезно и для интерполяции сигналов инкрементальных энкодеров, но в этом случае необходимо больше времени для выборки АЦП.
Датчики рефлективного типа в большей степени подвержены воздействию механической нестабильности системы. К примеру, при вибрации, если остановка ротора соответствует краю отражающей полосы в рабочей области датчика, рефлективный датчик непрерывно генерирует прерывания. В аналогичной ситуации с щелевым датчиком получение неоднозначного выхода при частичном затемнении фототранзистора позволяет избежать гистерезис в схеме компаратора, но рефлективный датчик потребует дополнительных аппаратных и программных средств. Для обнаружения необычных условий программа может иметь таймер, отслеживающий время между прерываниями, при несогласовании которого подпрограмма обслуживания прерываний может их игнорировать.
Для правильности и безопасности системы необходима и гарантия того, что сбойные датчики будут локализованы. Так, сбойный или отсоединенный светодиод позволяет фототранзистору предоставлять системе информацию об остановке двигателя, закрытом капоте или двери. Ту же самую информацию может предоставлять засоренный фототранзистор.
Первый способ решения проблемы — применение двух датчиков с инверсными выходами. Один из них блокируется при открытом капоте, второй — при закрытом. Одновременно анализируется состояние двух датчиков, которые для верификации состояния или функциональности системы должны оба находиться в правильном состоянии.
Метод обнаружения отсоединенного светодиода — определение напряжения на аноде светодиода. Когда светодиод включен, падение напряжения, определяемое компаратором, составит около 1,2 В (типично), и выход компаратора будет высоким. Если светодиод открывается, напряжение на аноде возрастет до Ucc (более 3 В).
Для детектирования сбойных условий закорачивания можно добавить второй компаратор. Опорное напряжение в этом случае выбирается порядка 0,6 В, программное обеспечение объявляет ошибку, если напряжение падает ниже опорного.
Оптические энкодеры Оптические методы достаточно популярны в автоэлектронике, поскольку принцип их работы прост, а точность выше, чем у электрических методов.
В общих чертах теория энкодеров рассматривалась в части 5 данной публикации, поскольку требовалось пояснить принцип работы перспективных магнитных угловых энкодеров Холла. В сравнении с оптическими энкодерами магнитные энкодеры обладают следующими преимуществами: работают в условиях повышенной загрязненности и высоких температур, а также обеспечивают уменьшенное число компонентов. Как показано выше, оптоэлектронные схемы довольно просты, но магнитные энкодеры концентрируют измерительные, вычислительные и интерфейсные функции в пространстве одной ИС, в итоге обеспечивая общий малый размер устройства и низкую цену.
Высокую точность, способность предоставлять информацию в цифровой форме, стабильность и помехоустойчивость обеспечивают именно принципы, лежащие в основе энкодерных технологий [165–172, 173–180]. Именно оптическая технология предложила ряд классических способов для построения энкодера — датчика, предоставляющего информацию о движении, положении или направлении либо непосредственно в цифровой форме, либо генерирующего последовательность импульсов, из которой после оцифровки может быть сформирован цифровой код.
Угловые оптические энкодеры. 
Рис. Инкрементальный энкодер — датчик относительного положения, скорости и направления а–б — угловой инкрементальный энкодер; в — конструкция измерительной головки: 1 — корпус датчика; 2 — светодиод — источник света для инкрементальных каналов А и Б; 3, 4 — ординарные фотодетекторы (фототранзисторы или фотодиоды); 5 — светодиод — источник света для индексного канала; 6 — фотодетектор индексной метки; 7 — терминалы для монтажа на печатной плате; 8 — элементы для монтажа корпуса; 9 — 4-битный (24 = 16 положений) перфорированный ротор с прорезями; 10 — прорези для инкрементальных каналов; 11 — прорезь — индексная метка; 12 — вращающийся вал; г — вариант исполнения 4-битного инкрементального ротора из стекла; д–е — варианты сигналов инкрементального энкодера: д — цифровой инкрементальный энкодер (инкрементальные каналы А и Б, индексный выход В фототранзисторов, канал скорости).
Угловой оптический энкодер состоит из тонкого оптического диска и стационарного блока — измерительной головки, включающей источник света и фотодетектор. Измерительная головка может быть построена как по принципу прерывателя, так и рефлектора, но прерыватель проще реализуется и используется чаще.
Оптический диск прерываемого энкодера включает кодированную последовательность прозрачных и непрозрачных участков. Маркеры могут представлять собой, например, отверстия в металлическом листе или метки на стеклянном диске. При вращении диска, в зависимости от его типа, маркеры пропускают или перекрывают луч света, направленный от светового источника к фотоприемнику (фотодиоду или фототранзистору).
Фотодетектор генерирует сигнал частотой, равной частоте следования кодовых элементов, в цифровой форме (фототранзистор) или аналоговый импульсный сигнал, который также может быть усилен и оцифрован. При подключении внешнего счетчика прямоугольных импульсов оптический метод позволяет измерять угловую скорость вращения диска. Посредством нанесения специальной индексной отметки, индицирующей начальное положение диска, уже можно измерять относительное угловое положение вала в диапазоне 360°. Этот тип датчиков представляет собой так называемые инкрементальные энкодеры — самые простые и наименее дорогие оптические устройства.
При добавлении второй пары «светодиод-фототранзистор» с угловым смещением относительно первой, соответствующим четверти периода сигнала, может быть получена вторая последовательность импульсов — канал Б с фазовым смещением относительно канала А на 90° (рис. д–ж). Инкремен тальный энкодер, который использует три оптических датчика (один для детектирования положения фазы 0° — канал В, два других — для формирования инкрементальных каналов с фазовым смещением сигналов в 90°), позволяет одновременно удваивать разрешение при измерении положения и скорости и детектировать направление.
Разрешение инкрементальных энкодеров измеряется в импульсах за оборот (pulses per revolution, ppr). В дальнейшем разрешение может быть увеличено посредством нанесения большего числа линий на оптический диск и добавления пар «светодиод–фотодетектор» в измерительной головке. Максимальное число счетов за вращение представляет собой функцию диаметра энкодерного диска и характеристик светопередачи, определяющих допустимый размер кодовых элементов.
Существуют различные способы нанесения маркеров на оптический диск. В ранних системах чаще использовались металлические диски с перфорацией (рис. 76а–б), но максимальная площадь отверстий для повышения разрешающей способности и точности датчика ограничена — должно оставаться некоторое количество материала, обеспечивающее форму и прочность диска. Современные диски изготавливаются из стекла, маркеры на котором вытравливаются (рис. г). Этот метод позволяет получить типично 100–6000 сегментов, что соответствует разрешению в 3,6–0,06°.

Рис.. Инкрементальный энкодер — датчик относительного положения, скорости и направления д–е — варианты сигналов инкрементального энкодера: е— инкрементальный энкодер с аналоговыми выходами (выходы фотодиодов и оцифрованные сигналы); ж— поведение инкрементального энкодера при изменении направления (обобщено для аналоговых и цифровых сигналов).
Одним из главных недостатков инкрементального энкодера является то, что последовательность импульсов запасается во внешнем буфере или счетчике. При сбое в подаче питания счет будет потерян. Кроме того, если машина с инкрементальным энкодером предполагает отключение на ночь, то на следующий день энкодер не сможет предоставить информацию о точном положении вала, пока не будет активирован внешний переключатель (home-detection switch) или программа подключения, вращающая вал до прохождения индексной отметки, которая затем каждый раз обнуляет буфер счетчика, начиная отсчет относительного положения.
Решение данной проблемы предоставляют абсолютные энкодеры, которые используют более точный метод определения положения, основанный на кодировании абсолютного положения посредством множественных групп сегментов, размещенных на диске по линиям концентрических окружностей.

Рис. Абсолютный энкодер — датчик абсолютного положения и скорости а–б — 4-битный угловой абсолютный энкодер; в — конструкция измерительной головки: 1 — корпус датчика; 2 — массив светодиодов; 3 — массив фотодетекторов (фототранзисторов или фотодиодов); 4 — терминалы измерительной головки; 5 — 4-битный ротор с кодом Грэя; 6 — вращающийся вал; г — вариант исполнения 4-битного абсолютного ротора с двоичным кодом из стекла; д — выходной цифровой код двоичного абсолютного энкодера; е, ж — линейный 4-битный абсолютный энкодер с двоичным кодированием и оцениванием посредством V-выборки; 1 — корпус измерительной головки; 2 — измерительная линейка; 3 — массив фотодетекторов V-выборки; е — оценивание посредством V-выборки: AB0, A1…A4, B1…B4 — фотодетекторы в составе двух линеек V-выборки (выбираемые для оценивания подсвечены желтым); ж — иллюстрация линейного абсолютного энкодера.
Концентрические окружности начинаются в центре энкодерного диска, при этом каждая следующая окружность характеризуется количеством сегментов, удвоенным по сравнению с предыдущей. Первое кольцо будет иметь только один прозрачный и один непрозрачный сегмент, второе — два прозрачных и два непрозрачных, третье — по четыре тех и других и т. д. Число окружностей определяет разрядность энкодера: 4 окружности соответствуют 4-разрядному энкодеру (24 = 16 положений), 16 — 16-разрядному устройству с 32 767 сегментами и угловыми положениями.
Для считывания двоичного кода посредством абсолютного энкодера необходим один источник света и один фотоприемник для каждой линии на энкодерном диске. В измерительной головке светодиоды и, что более важно, фотодетекторы объединяются в линейные массивы (рис. в).
Поскольку абсолютный энкодер образует последовательность битов, различную для каждого углового положения, он всегда предоставляет информацию об угловом положении системы, при включении и выключении не нуждается в переключателе нулевого положения и программе подключения и более устойчив к шумам, так как следующее за сбойным положение будет прочитано правильно.
В энкодере на рис. а-б четыре оптических датчика детектируют маркеры диска с четырехбитным кодом Грэя, который позволяет закодировать 16 положений диска без опорной отметки: для каждого перехода сигнал изменяется только на один бит. Код Грея характеризуется отсутствием ошибок, но его недостаток — применение различных схем кодирования, более сложное оценивание сигналов и неоднозначность сигнала при неожиданном сбросе.
Другой вариант — использование стандартного бинарного (двоичного) кода, но на практике этот тип энкодеров имеет один недостаток: при переходе от 1111 к 0000 все четыре бита изменяются одновременно, и если переход в реальной системе выполнен не одновременно, это может приводить к ошибкам.
Для минимизации ошибок в двоичном коде предназначена так называемая V-выборка, принцип которой для диска, развернутого в прямую линию, проиллюстрирован на рис. 77е. Две линейки светодиодов и фотодетекторов размещаются в V-образной форме, для которой фотодетектор AB0 является общим. Для оценки V-выборки разработан специальный алгоритм, согласно которому логическое значение «0» или «1» для данного положения детектора, выбранного в линии i, определяет, какой детектор — «B» или «A» — должен быть активирован в линии (i+1). Если AB0 соответствует логическая «1», во второй линии анализируется A1, если AB0 соответствует логический «0», анализируется B1. Поскольку A1 на рис. 77е — «0», в линии 3 берется детектор B2. Последовательность выбранных фотодетекторов на рис. 77е подсвечена желтым цветом.
Линейные оптические энкодеры. Линейные измерения посредством оптических энкодеров реализуются довольно просто, если осуществить разворот оптического диска инкрементального или абсолютного энкодера в прямую линию. Угловое положение вала может быть преобразовано также в линейное положение посредством редуктора на валу энкодера.
4-битный линейный абсолютный энкодер с двоичным кодированием и V-выборкой, позволяющий детектировать расстояние L. Очевидно, что ключевой проблемой данного устройства является неизменный компромисс между длиной L энкодерной линейки и разрешением устройства, для повышения которого необходимо добавлять дополнительные кодовые линии и пары «светодиод–фотодетектор» в измерительной головке. В отличие от угловых энкодеров измерительная линейка будет отличаться значительной длиной, соответствующей полному рабочему ходу устройства, и гораздо более высокой ценой, поскольку речь идет о создании линейки с уникальными кодами для каждого положения в пределах всей ее длины и поддержании в производстве нескольких вариантов.
Для минимизации данной проблемы существует два основных варианта. Один способ — преобразовать линейное движение в угловое, оцениваемое, как правило, с помощью многооборотной схемы энкодеров, соединенных между собой цепочкой передач. Для грубой оценки пройденного расстояния (например, каждого м, дм или см) используется один энкодер, в пределах которого положение отслеживает более точно второй энкодер. Для дальнейшего повышения точности оценки число энкодеров может быть увеличено. Та же схема применяется и для отслеживания угловых перемещений более 360° — например, нескольких полных оборотов.
Второй способ — поиск новых возможностей на основе использования различных оптических эффектов, одним из которых является интерферометрия Муара.
Многооборотные угловые энкодеры. Преимуществом абсолютного энкодера является то, что частота вращения может быть понижена до одного оборота энкодерного диска в течение полного углового пути машины. Это позволяет с повышенной точностью детектировать реальные угловые перемещения менее 360°. Если же требуется отслеживать угловые перемещения более 360° — например, в несколько полных оборотов вала, применяется многооборотный угловой энкодер, который обычно представляет собой несколько энкодерных дисков, соединенных между собой цепочкой передач. Для грубой оценки вращения — подсчета числа оборотов — используется малый энкодер, в пределах которого положение отслеживает более точно 4-битный энкодер. Малый энкодер совершает только одно вращение, например, за 2000°, преодолеваемых большим энкодером. Для дальнейшего повышения точности оценки число энкодеров может быть увеличено.
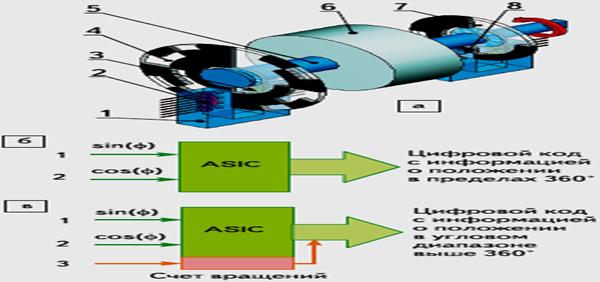
Рис. Многооборотный абсолютный энкодер а — конструкция: 1 — корпус датчика положения в пределах 360°; 2 — массив светодиодов; 3 — массив фотодетекторов; 4 — 4-битный ротор с двоичным кодом; 5 — вращающийся вал; 6 — редуктор; 7 — 2-битный ротор с двоичным кодом; 8 — измерительная головка — счетчик числа оборотов; б–в — сравнение принципов функционирования однооборотного и многооборотного энкодера: б — однооборотный энкодер; в — многооборотный энкодер.
Метод интерферометрии Муара. Метод интерферометрии Муара применяется для измерения положения в пределах значительных линейных расстояний — от нескольких сантиметров до нескольких метров. Технология, реализованная, например, немецкой фирмой Heidenhain, использует длинные перемещающиеся стеклянные пластины с очень тонкими линиями, выполненными методами микроструктурирования с малым постоянным периодом C. Свет проникает сквозь щели пластины, остальная поверхность которой металлизирована. 
Рис. 79. Инкрементальный линейный энкодер на основе интерферометрии Муара а— конструкция: 1— подвижная стеклянная пластина; 2— лампа; 3— линза; 4— неподвижная пластина с прорезями 5; 6— массив инкрементальных фотодетекторов смещенных синусоидальных сигналов; 7— массив фотодетекторов индексной отметки; б— принцип работы устройства

Рис. Инкрементальный линейный энкодер на основе интерферометрии Муара в — синусоидальные сигналы инкрементальных фотодетекторов, фотодетекторов индексной отметки и синусно-косинусные дифференциальные сигналы.
Измерительная головка датчика включает источник света, которым в отличие от лазерного интерферометра может быть любая лампа, чей свет проникает сквозь прорези малой фиксированной пластины-коллиматора, размещенной между лампой и подвижной пластиной (рис. а). Период прорезей и период линий подвижной пластины C согласованы (рис. б). Фотодетекторы, размещенные с другой стороны стеклянной пластины, определяют светопередачу устройства.
При движении измерительной линейки и достижении фазового совпадения прорезей неподвижной пластины с подвижной обеспечивается максимально высокая светопередача, в противофазе фотодетектор полностью затемнен, а между этими точками сигнал фототока детектора представляет собой синусоидальную функцию:

Для определения положения в инкрементальной системе используются 5 фотодетекторов (или массивов фотодетекторов), предоставляющих 4 синусоидальных сигнала каждый и один индексный сигнал (рис. 79в). Четыре решетки в пластине измерительной головки с одинаковым периодом C сдвинуты на 1/4 периода так, что синусоидальные сигналы также сдвинуты по фазе на 1/4 периода.
Разрешение данной системы составляет 1/4 периода C (2,5 мкм для C = 10 мкм), увеличение которого до <0,5 мкм возможно посредством интерполяции.
Дифференциальные синусно-косинусные сигналы с фазовым смещением в 90°, полученные при взаимном вычитании сигналов фотодетекторов, позволяют определять направление движения. Поскольку сигналы имеют точку нулевой передачи, они легко оцифровываются.
Инкрементальные интерферометрические измерители позволяют детектировать расстояния до 30 м с шагами до 0,1 мкм.
На основе принципа интерферометрии Муара может быть создан и абсолютный энкодер, позволяющий получить информацию об абсолютном положении.

Рис. Абсолютный линейный энкодер на основе интерферометрии Муара 1 — подвижная стеклянная пластина со строками линий с различными периодами C0–C6; 2 — лампа; 3 — линза; 4 — неподвижная пластина со строковыми прорезями; 5 — массив строковых фотодетекторов (для формирования четырех смещенных синусоидальных сигналов в строке).
В конструкции абсолютного энкодера каждая строка подвижной стеклянной пластины характеризуется различным периодом линий, размещенных в соответствии со специальным алгоритмом. Каждой строке соответствует четыре фиксированных набора прорезей неподвижной платы, позволяющих получить в каждой строке 4 смещенных сигнала, отслеживаемых массивом фотодетекторов.
Метод интерферометрии Муара предоставляет возможность реализовать измерение абсолютного положения с шагами порядка 0,1 мкм в пределах длины до 3 м.
Методы линейной интерферометрии могут быть преобразованы также для детектирования углового положения.
Основные сферы применения оптических датчиков:
- датчики абсолютного углового положения, крутящего момента и скорости в системах электронного управления автомобилем drive-by-wire EPAS (electrically power assisted steering), EHPAS (electro-hydraulic power assisted steering), ESP;
- датчик окружающего света для автоматической регулировки параметров освещения ЖК-- дисплеев (контроля уровня тока подсветки и продления срока службы);
- оптические датчики для обнаружения пассажиров, измерения расстояния между пассажиром и модулем подушки безопасности (оптимизация скорости заполнения подушки в зависимости от веса и положения сиденья и серьезности аварии);
CMOS-камеры для обнаружения положения пассажиров, задние камеры;
- датчики дождя Rain Sensor для контроля работы стеклоочистителей ветрового стекла (рефлективный датчик распознает дождевые капли на ветровом стекле);
- электрохроматические зеркала (датчик определяет приближающийся свет следующего транспортного средства и автоматически затемняет зеркала заднего вида);
- датчики солнечной нагрузки и датчики автоматического света Sun Load Sensors/Auto Light Sensors (для включения автоматического охлаждения воздуха);
- датчики положения натяжителя ремня Belt Pretensioner Sensors и положения сиденья Seat Position Sensors в системах автоматической регулировки положения (преобразователи «свет–частота» и «свет–напряжение», линейные массивы);
- контроль закрытия двери;
- коррекция цвета светодиодов (TCS230-преобразователь цветового излучения светодиода в частоту);
- адаптивные системы переднего света, автоматическое включение и контроль интенсивности фар Heads Up Display (HUD);
- контроль освещения интерьера автомобиля;
- обнаружение угарного газа;
- системы оптической идентификации;
- лазерные системы обнаружения и определения расстояния до препятствия, радары, видеодатчики и т. д.