ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К РАСЧЕТНО-ГРАФИЧЕСКОЙ РАБОТЕ
ПО ДИСЦИПЛИНЕ
"Микропроцессорные системы"
на тему: «Микропроцессорная система»
Выполнил: студент 4 курса
____________________________
(Ф.И.О.)
Руководитель:
Котов Юрий Терентьевич
Мытищи — 20__ г.
Техническое задание
Разработать МПС для контроля и регистрации параметров импульсных электрических сигналов, поступающих на вход МПС с выхода датчика электрических сигналов. Результаты контроля должны выводиться на индикатор.
Время работы МПС – 200 с, амплитуда сигнала – Uвх = 4 В, длительность сигнала – Т = 200 мС, период следования – Тсл = 0,2 с, контролируемый параметр – порядковые номера сигналов с отклонением их длительности на уровне 0,5 Uвх более 10% за время контроля сигнала – 100 - 150 с.
Форма сигнала:
1. Введение
Входной сигнал, формируемый внешними устройствами, в реальных условиях эксплуатации объекта имеет погрешности, которые проявляются в изменении некоторых его параметров (амплитуды, длительности фронтов или спадов и т.д.). Изменение параметров входных сигналов в большинстве случаев негативно сказывается на работоспособности объектов. Поэтому знание о параметрах входных сигналов является важным фактором, определяющим надежность работы объекта.
В настоящее время для проведения высокоточного контроля параметров входных сигналов используются микропроцессорные системы (МПС). Целесообразность их применения обусловлена надежностью, оперативностью обработки информации и достоверностью получения конечного результата.
Также немаловажным фактором является высокая точность результатов контроля. Это обеспечивается тем, что средства, обеспечивающие цифровую обработку информации, привносят меньшую погрешность в конечный результат по сравнению с другими устройствами.
К сказанному следует добавить, что большие интегральные схемы (БИС), на которых строится большинство МПС различного функционального применения, входят в состав микропроцессорных комплектов (МПК БИС). Такая реализация БИС позволяет минимизировать временные и финансовые затраты на разработку и создание микропроцессорных устройств на их основе, повысить надежность в их эксплуатации, улучшить многие технические характеристики как самих устройств, так и систем на их основе.
Выбор и обоснование блок-схемы МПС
Для выбора блок-схемы МПС проведем анализ технического задания.
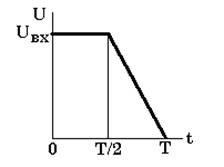
В соответствии с техническим заданием импульсный сигнал амплитудой Uвх = 4 В имеет трапецеидальную форму.

Рис. 1
Длительность идеального по форме сигнала (рис. 1) составляет Тид =150 мс. Под воздействием различных эксплуатационных факторов (климатических, механических, специальных и др.) и погрешностей, вносимых датчиком, каналами передачи информации, буферными схемами и т.д., форма идеального сигнала, а, значит, и его длительность, изменяются. В соответствии с техническим заданием длительность реального сигнала может происходить, например, как показано пунктирной линией на рис.1 и допустимые отклонения ∆t не должны превышать 10%, что составляет
∆t = 150 x 1,1 = 165 мс.
За время контроля T = 150 с – 100 с = 50 с, при периоде следования tсл = 200 мс, в систему поступит число сигналов N, длительность которых необходимо измерить:
N = T/tсл = 50000 мс / 200 мс = 250.
Предполагая, что отклонение длительности сигнала на уровне 0,5 Uвх на более, чем 10%, может произойти у К сигналов из 250, поэтому в разрабатываемой схеме МПС для хранения их порядковых номеров предполагается использование оперативного запоминающего устройства (ОЗУ) емкостью не менее 150 байт.
Выбор емкости ОЗУ определяется максимально возможным числом входных сигналов (250 сигналов), которые могут иметь отклонение длительности на уровне 0,5 Uвх более 10%.
Для хранения команд программы обработки входной информации в составе МПС необходимо иметь постоянное запоминающее устройство (ПЗУ).
Программная обработка входных сигналов должна производиться микропроцессорным модулем, состоящим из микропроцессора (МП), генератора тактовых импульсов (ГТИ) и системного контроллера (СК), обеспечивающего формирование управляющих сигналов для внешних устройств (ВУ).
Необходимым устройством в МПС является устройство ввода-вывода (УВВ), которое должно выдавать информацию о величине длительности входного сигнала на уровне 0,5 Uвх. В качестве такого устройства может быть использована БИС цифрового компаратора, который преобразует амплитуду входного сигнала в цифровой эквивалент на уровне 0,5 Uвх. Выбор компаратора осуществляется исходя из следующего условия – его разрядность должна быть равной разрядности МП.
В состав МПС должен входить таймер временных интервалов (ТВИ). Необходимость его использования вызвана необходимостью программного формирования временных задержек, связанных со следующими факторами:
- контроль длительности входных сигналов должен производиться не с самого начала подключения системы к работе, а через 100 с (рис. 2). При этом контроль должен закончится через 50 с, то есть на 150 секунде от начала работы МПС,
- инициализация работы цифрового компаратора должна быть синхронизирована во времени с временем поступления очередного сигнала в систему,
- вывод каждого результата измерения на блок индикации должен производится с временной задержкой для удобства визуального восприятия оператором результата измерения.

В соответствии с заданием после завершения контроля его результаты должны быть выведены на индикацию для визуального отображения. В качестве этого устройства будет использован блок индикации, который может включать набор семисегментных индикаторов и блок управления ими.
Наибольшее применение на практике получили МПС с трехшинной конфигурацией. Она содержит физически разделенные шины данных (ШД), адреса (ША) и управляющую (ШУ). Такая МПС обладает наиболее высоким быстродействием по-сравнению с другими структурами.
Таким образом, в соответствии с изложенными результатами анализа технического задания, блок-схема разрабатываемой МПС будет иметь вид, представленный на рисунке 3:

Рис. 3
4. Разработка принципиальной схемы МПС
Для построения МПС с учетом ее технических характеристик выбираем микропроцессорный комплект больших интегральных схем (МПК БИС) К580. Его выбор обусловлен простотой построения структуры МПС, удобством программирования, доступностью БИС, высокой надежностью в эксплуатации и т.д. В качестве БИС поддержки (память, порты ввода-вывода и пр.) выбираем БИС 155 и 1107 серий, которые легко сопрягаются по электрическим параметрам с БИС серии К580.
Структурная схема МПС приведена на рис. 4.
5. Описание работы МПС
Процесс контроля начинается с момента включения МПС. Сигналом "пуск", поступающим с разъема XS1, питание подается ко всем элементам МПС. При этом МП производит последовательное считывание из БИС DD7 следующих команд:
- команды, несущей информацию о числе N = 250 подлежащих контролю входных сигналов,
- команды, несущей информацию о длительности идеального сигнала Тид = 150 мс на уровне 0,5 Uвх (со значением длительности этого спада в дальнейшем будет сравниваться длительность каждого из 150 реального входного сигнала),
- команды, предназначенной для программирования первого канала ТВИ (выход 10 DD13) на формирование временного интервала 100 – 150 с, в течении которого будет производиться контроль,
- команды, предназначенной для программирования второго канала ТВИ (выход 13 DD13) на формирование задержки 100 c для синхронизации работы цифрового компаратора с моментом времени поступления входных сигналов на вход системы,
- команды, предназначенной для программирования третьего канала ТВИ (выход 17 DD13) на формирование задержки на 3 секунды вывода результатов контроля в блок индикации.
Значение длительности идеального сигнала Тид = 150 мс на уровне 0,5 Uвх, считанной МП из ПЗУ, записывается в виде двоичного 8 - ми разрядного кода в универсальный регистр общего назначения (РОН) "В". Данная информация будет храниться в регистре весь цикл проведения контроля. Сохранение необходимо для того, чтобы в дальнейшем в процессе работы МПС содержимое этого регистра многократно использовать для определения величины отклонения длительности ∆t на уровне 0,5 Uвх каждого входного сигнала за время контроля.
Входные сигналы поступают на вход 13 цифрового компаратора DD8 сразу же после начала работы МПС. Однако в течении первых 100 секунд управляющий сигнал, поступающий с выхода 10 DD13 ТВИ на вход 41 компаратора DD8, блокирует его работу. В системную магистраль никакой информации от компаратора DD8 не поступает.
По истечении 100 секунд ТВИ своим управляющим сигналом по входу 41 снимает блокировку с выходов D1 - D8 цифрового компаратора. Однако вторым управляющим сигналом с выхода 13 DD13 работа компаратора DD8 продолжает блокироваться до момента появления на его входе следующего входного сигнала. Этим сигналом осуществляется синхронизация работы компаратора с моментом появления спада очередного входного сигнала.
После разблокирования компаратора DD8 первый сигнал с выходов компаратора D1 - D8 в оцифрованном виде на уровне 0,5 Uвх поступает по ШД на входы D80 - D87 системного контроллера DD9, а через него на входы D0 - D7 МП (DD2) на обработку. При этом МП специальной командой из ПЗУ записывает в универсальный регистр - счетчик событий "С", порядковый номер входного сигнала (в данном случае - №1). Следующей командой МП рассчитывает длительность реального сигнала на уровне 0,5 Uвх1, а, затем, сравнивает длительность реального сигнала с его идеальным значением на уровне 0,5 Uвх1, хранящимся в РОН "В". В результате на выходе МП формируется информация о величине отклонения ∆t1 длительности первого реального сигнала от длительности его идеального значения.
Если в результате контроля отклонение было менее 10%, то результат этого измерения игнорируется и МП ждет прихода новой информации с выходов цифрового компаратора DD8, который в интервале времени между входными сигналами закрыт сигналом с выхода 13 DD13. Если же отклонение длительности сигнала оказывается более 10%, то МП по команде из ПЗУ из РОН "С", хранящего порядковый номер входного сигнала, выводит этот номер на хранение в ОЗУ (DD5. DD6).
Таким образом, в DD5, DD6 ОЗУ заносится информация о порядковом номере первого сигнала с отклонением его длительности на уровне 0,5 Uвх более 10%.
Следующим управляющим сигналом с выхода 13 ТВИ цифровой компаратор DD8 оцифровывает второй входной сигнал, который, как и в первом случае, поступает на обработку в МП. МП инкрементирует содержимое R2, записывая в него порядковый номер второго входного сигнала, поступившего с выходов цифрового компаратора. Процесс его обработки повторяется по аналогии с первым.
При этом, если отклонение длительности сигнала снова оказывается более 10%, то МП по команде из ПЗУ из РОН "С" снова выводит этот номер на хранение в ОЗУ. А содержимое регистра-счетчика событий снова инкрементируется.
Процесс контроля завершается с появлением 250 входного сигнала. Блокирующий управляющий сигнал с выхода 10 DD13 ТВИ, сформированный на 7-й сек., прекращает работу цифрового компаратора DD8.
После этого МП вводит из ПЗУ DD7 команду вывода из ОЗУ в блок индикации L1 через каждые 3 с команды о порядковых номерах входных сигналов, которые имели величину отклонения более 10%. Трехсекундная задержка формируется сигналами с выхода 17 ТВИ DD13, которые поступают на вход "E" дешифратора DD11, осуществляющего управление работой блока индикации.
Вся информация, полученная в процессе контроля, выводится из ОЗУ в блок индикации. При этом содержимое РОН "С", хранящее число входных сигналов с отклонением длительности спада более 10%, при каждой итерации вывода информации в блок индикации, уменьшается на единицу.
Каждое выведенное на индикацию значение сигналами управления с ТВИ сохраняется 3 секунды с тем, чтобы оператор имел бы возможность визуального восприятия результатов контроля.
После вывода последнего значения из ОЗУ в блок индикации содержимое регистра "С" обнуляется и процесс контроля завершается до нового запуска МПС.
