Кинематика занимается описанием движения, отвлекаясь от его причин. Для описания движения можно выбирать различные системы отсчета. В различных системах отсчета движение одного и того же тела выглядит по разному. В кинематике при выборе системы отсчета руководствуются лишь соображениями целесообразности, определяющимися конкретными условиями. Так, при рассмотрении движения тел на Земле естественно связать систему отсчета с Землей, что мы и будем делать. При рассмотрении движения самой Земли систему отсчета удобнее связывать с Солнцем и т. п. Никаких принципиальных преимуществ одной системы отсчета по сравнению с другой в кинематике указать нельзя. Все системы отсчета кинематически эквивалентны.
Величина, характеризующая в каждый данный момент времени направление и быстроту движения точки, называется скоростью (v на рис. 192). Вектор скорости всегда направлен вдоль касательной в ту сторону, куда движется точка. Числовое значение скорости в любой момент времени выражается производной от расстояния по времени:
v = ds/dt или v = f'(t).
Ускорение a точки в каждый данный момент времени характеризует быстроту изменения скорости. При этом нужно отчетливо понимать, что скорость – вектор, и, следовательно, изменение скорости может происходить по двум признакам: по числовой величине (по модулю) и по направлению.

Углова́я ско́рость — векторная физическая величина, характеризующая скорость вращения тела. Вектор угловой скорости по величине равен углу поворота тела в единицу времени:
 а направлен по оси вращения согласно правилу буравчика, то есть, в ту сторону, в которую ввинчивался бы буравчик с правой резьбой, если бы вращался в ту же сторону.
а направлен по оси вращения согласно правилу буравчика, то есть, в ту сторону, в которую ввинчивался бы буравчик с правой резьбой, если бы вращался в ту же сторону.
Вектор перемещения – Это вектор, соединяющий начальное и конечное положение тел, и направленный к конечному положению.
СКОРОСТЬ, характеристика движения точки (тела), численно равная при равномерном движении отношению пройденного пути к промежутку времени, за которое этот путь пройден.
3 Интеграл (от лат. integer — целый), одно из важнейших понятий математики, возникшее в связи с потребностью, с одной стороны, отыскивать функции по их производным (например, находить функцию, выражающую путь, пройденный движущейся точкой, по скорости этой точки), а с другой — измерять площади, объёмы, длины дуг, работу сил за определённый промежуток времени и т. п. Соответственно с этим различают неопределенные и определённые И., вычисление которых является задачей интегрального исчисления.
Производная, основное понятие дифференциального исчисления, характеризующее скорость изменения функции
Нормальное ускорение, составляющая ускорения точки при криволинейном движении, направленная по главной нормали к траектории в сторону центра кривизны; Н. у. называется также центростремительным ускорением. Численно Н. у. равно v 2/r, где v — скорость точки, r — радиус кривизны траектории. При движении по окружности Н. у. может вычисляться по формуле r w2, где r — радиус окружности, w— угловая скорость вращения этого радиуса. В случае прямолинейного движения Н. у. равно нулю.
Тангенциальное ускорение - составляющая ускорения, направленная вдоль касательной к траектории движения в данной точке. Тангенциальное ускорение характеризует изменение скорости по модулю.
Углово́е ускоре́ние —физическая величина, характеризующая быстроту изменения угловой скорости твёрдого тела.
При вращении тела вокруг неподвижной оси, угловое ускорение по модулю равно[1]:
 Вектор углового ускорения α направлен вдоль оси вращения
Вектор углового ускорения α направлен вдоль оси вращения
Ньютона Законы
три закона, лежащие в основе классической (ньтоновской) механики.
1-й закон (закон инерции): если на материальную точку не действуют другие тела, то она находится в состоянии покоя или равномерного прямолинейного движения.
2-й закон (основной закон динамики): произведение массы тела m на его ускорение a равно сумме всех сил Fi, действующих на тело: ma=ΣFi.
3-й закон: две материальные точки действуют одна на другую с силами, равными по величине и направленными в противоположные стороны, вдоль прямой, соединяющей эти точки.(При взаимодействии двух тел всегда возникают силы, приложенные к каждому из тел, при этом силы равны друг другу по величине и противоположны по направлению)
Сила - векторная величина, характеризующая механическое действие одного тела на другое, которое проявляется в деформациях рассматриваемого тела и изменении его движения относительно других тел.
Сила характеризуется модулем и направлением. Модуль и направление силы не зависят от выбора системы отсчета.
Понятие силы относится к двум телам. Всегда можно указать тело, на которое действует сила, и тело со стороны которого она действует.
Способы измерения силы:
-определение ускорения эталонного тела под действием данной силы;
- определение деформации эталонного тела.
5 МАССА- фундаментальная физическая величина, определяющая инертные и гравитационные свойства всех тел - от макроскопических тел до атомов и элементарных частиц.
ИМПУЛЬС в физике, 1) мера механического движения (то же, что количество движения). Импульсом обладают все формы материи, в том числе электромагнитные, гравитационные и другие поля В простейшем случае механического движения импульс равен произведению массы тела m на скорость его поступательного движения v. 2) Импульс силы - мера действия силы за некоторый промежуток времени; равен произведению среднего значения силы на время ее действия.
Кинетическая энергия – энергия, которой обладает тело вследствии своего движеня (формула- Масса умн. на скорость, возведенную в квадрат, и все это делить на 2)
Мощность N- это количественная мера быстроты совершения работы. Мощность = работе, совершаемой за единицу времени(деленной на время t)
Работа А – Механическая работа — это физическая величина, являющаяся скалярной количественной мерой действия силы или сил на тело или систему, зависящая от численной величины и направления силы (сил) и от перемещения точки (точек) тела или системы[1].

Закон сохранения импульса (Закон сохранения количества движения) - векторная сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная.
(сумма импульсов ДО взаимодействия тел, равна сумме импульсов ПОСЛЕ их взаимодействия)
6. (1 закон Ньютона) Существуют такие системы отсчёта, называемые инерциальными, относительно которых материальная точка при отсутствии внешних воздействий сохраняет величину и направление своей скорости неограниченно долго.
(2зН) В инерциальной системе отсчёта ускорение, которое получает материальная точка, прямо пропорционально равнодействующей всех приложенных к ней сил и обратно пропорционально её массе. 
(3зН) Материальные точки попарно действуют друг на друга с силами, имеющими одинаковую природу, направленными вдоль прямой, соединяющей эти точки, равными по модулю и противоположными по направлению 
Существуют четыре фундаментальных силы: гравитационные, электромагнитные, сильные, слабые (два последних – ядерные силы)
Динамика – раздел механики, в котором изучаются причины возникновение механического движения.
Классическая динамика изучает следующие виды сил: тяжести, упругости, трения, гравитационные силы.
7. Момент силы (крутящий момент, вращательный момент) – физическая величина, характеризующая вращательное действие силы на твердое тело. 
Момент импульса (угловой момент, кинетический момент) – физическая величина, характеризующая количество вращательного движения, зависящая от того, сколько массы вращается, как она распределена относительно оси вращения и с какой скоростью происходит вращение. 
Зако́н сохране́ния моме́нта и́мпульса (закон сохранения углового момента) — векторная сумма всех моментов импульса относительно любой оси для замкнутой системы остается постоянной в случае равновесия системы. В соответствии с этим, момент импульса замкнутой системы относительно любой неподвижной точки не изменяется со временем.
8. Закон сохранения механической энергии - физический закон, в соответствии с которым в замкнутой системе, в которой не действуют силы трения и сопротивления, сумма кинетической и потенциальной энергии всех тел системы остается величиной постоянной.

Силовое поле — это векторное поле в пространстве, в каждой точке которого на пробную частицу действует определённая по величине и направлению сила (вектор силы).
(Различают стационарные поля, величина и направление которых могут зависеть исключительно от координат x, у, z точки действия силы, и нестационарные силовые поля, зависящие также от момента времени t, в который происходит действие. Выделяют также однородное силовое поле, для которого сила, действующая на пробную частицу, постоянна во всех точках пространства).
Потенциальные силы — силы, работа которых не зависит от формы траектории (зависит только от начальной и конечной точки приложения сил). Отсюда следует определение: Потенциальные (или же консервативные) силы — такие силы, работа которых по любой замкнутой траектории равна 0. Если в системе действуют только консервативные силы, то механическая энергия системы сохраняется
 - работа консервативных сил по замкнутому кругу равна 0.
- работа консервативных сил по замкнутому кругу равна 0.
Потенциальная энергия системы – это функция механического состояния системы, зависящая от взаимного расположения всех тел системы и от их положения во внешнем потенциальном поле сил. Убыль потенциальной энергии равна работе, которую совершают все консервативные силы (внутренние и внешние) при переходе системы из начального положения в конечное.

Из определения потенциальной энергии следует, что она может быть определена по консервативной силе, причём с точностью до произвольной постоянной, значение которой определяется выбором нулевого уровня потенциальной энергии.

Таким образом, потенциальная энергия системы в данном состоянии равна работе, совершаемой консервативной силой при переводе системы из данного состояния на нулевой уровень.
Из определения потенциальной энергии следует, что она может быть определена по консервативной силе, причём с точностью до произвольной постоянной, значение которой определяется выбором нулевого уровня потенциальной энергии.
Таким образом, потенциальная энергия системы в данном состоянии равна работе, совершаемой консервативной силой при переводе системы из данного состояния на нулевой уровень.
1)  – потенциальная энергия тела массой m, поднятого на высоту h относительно нулевого уровня энергии в поле силы тяжести; 2)
– потенциальная энергия тела массой m, поднятого на высоту h относительно нулевого уровня энергии в поле силы тяжести; 2)  – потенциальная энергия упругого деформированного тела, х – деформация тела.
– потенциальная энергия упругого деформированного тела, х – деформация тела.
9. При отсутствии сил трения и при воздействии только сил упругости и тяготения полная механическая энергия замкнутой системы тел остается постоянной при любых движениях тел системы.
 .
.
 - Закон сохранения полной механической энергии в системе взаимодействующих частиц.
- Закон сохранения полной механической энергии в системе взаимодействующих частиц.
10. Закон сохранения импульса (Закон сохранения количества движения) - векторная сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная.
(сумма импульсов ДО взаимодействия тел, равна сумме импульсов ПОСЛЕ их взаимодействия)
mV1 + mV2 = (V1 + V2) m
Закон сохранения момента импульса (закон сохранения углового момента) — векторная сумма всех моментов импульса относительно любой оси для замкнутой системы остается постоянной в случае равновесия системы. В соответствии с этим, момент импульса замкнутой системы относительно любой неподвижной точки не изменяется со временем.
Орбитальный момент импульса - момент импульса микрочастицы, обусловленный её движением в силовом поле, обладающем сферической симметрией
(ПОЯСНЕНИЕ Ц-СИСТЕМЫ): Ц-система – система отсчета, жестко связанная с центром масс системы частиц и перемещается поступательно по отношению к инерциальным системам.
L = L` + [ r0 p ]
Из формулы следует, что если полный импульс системы p = 0, то ее момент импульса не зависит от выбора точки О.
Вывод: в Ц-системе момент импульса системы частиц не зависит от выбора точки, относительно которой его определяют. Этот момент импульса называется СОБСТВЕННЫЙ МОМЕНТ ИМПУЛЬСА и обозначается L~
Вопрос 11: Систе́ма це́нтра масс (систе́ма це́нтра ине́рции) — невращающаяся система отсчёта, связанная с центром масс механической системы.Суммарный импульс системы в с.ц.м. равен нулю. Для замкнутой системы её система центра масс инерциальна, тогда как незамкнутая система в общем случае может обладать неинерциальной системой центра масс. Суммарная кинетическая энергия механической системы в с.ц.м. минимальна среди всех систем отсчёта; в любой другой невращающейся (не обязательно инерциальной) системе отсчёта кинетическая энергия равна кинетической энергии в с.ц.м. плюс кинетическая энергия движения механической системы как целого (MV²/2, где М — полная масса механической системы, V — относительная скорость движения систем отсчёта).
Под реактивным движением понимают движение тела, возникающее при отделении некоторой его части с определенной скоростью относительно тела,например при истечении продуктов сгорания из сопла реактивного летательного аппарата. При этом появляется так называемая реактивная сила, сообщающая телу ускорение.Реактивная сила действует лишь до тех пор, пока продолжается истечение воздуха.Главная особенность реактивной силы состоит в том, что она возникает без какого-либо взаимодействия с внешними телами.Величина ·носит название реактивной силы. Она появляется вследствие истечения газов из ракеты, приложена к ракете и направлена противоположно скорости газов относительно ракеты. Реактивная сила определяется лишь скоростью истечения газов относительно ракеты и расходом топлива.
В широком смысле симметрия – это понятие, отображающее существующий в объективной действительности порядок, определенное равновесное состояние, относительную устойчивость, пропорциональность и соразмерность между частями целого.К геометрической форме симметрии (внешние симметрии) относятся свойства пространства – времени, такие как однородность пространства и времени, изотропность пространства, эквивалентность инерциальных систем отсчета и т.д. Одной из важнейших особенностей геометрических симметрий является их связь с законами сохранения. Согласно принципу относительности Эйнштейна, все физические законы имеют одинаковый вид в любых инерциальных системах отсчета. Это означает, что они симметричны (инвариантны) относительно перехода от одной инерциальной системы к другой. 4 вида симметрии являются универсальными:
1. Сдвиг начала координат. Это связано с физической эквивалентностью всех точек пространства, т.е. с его однородностью. В этом случае говорят о симметрии относительно переносов в пространстве.
2. Поворот тройки осей координат. Эта возможность обусловлена одинаковостью свойств пространства во всех направлениях, т.е. изотропностью пространства и соответствует симметрии относительно поворотов.
3. Сдвиг начала отсчета по времени, соответствующий симметрии относительно переноса по времени. Этот вид симметрии связан с физической эквивалентностью различных моментов времени и однородностью времени, т.е. его равномерным течением во всех инерциальных системах –отсчета. Смысл эквивалентности различных моментов времени заключается в том, что все физические явления протекают независимо от времени их начала (при прочих равных условиях).
4. Равномерное прямолинейное движение начала отсчета со скоростью V, т.е. переход от покоящейся системы к системе, движущейся равномерно и прямолинейно.
Вопрос 12: Абсолю́тно твёрдое те́ло — второй опорный объект механики наряду с материальной точкой. Механика абсолютно твердого тела полностью сводима к механике материальных точек (с наложенными связями), но имеет собственное содержание (полезные понятия и соотношения, которые могут быть сформулированы в рамках модели абсолютно твердого тела), представляющее большой теоретический и практический интерес.Абсолютно твёрдое тело — модельное понятие классической механики, обозначающее совокупность материальных точек, расстояния между которыми сохраняются в процессе любых движений, совершаемых этим телом. Иначе говоря, абсолютно твердое тело не только не изменяет свою форму, но и сохраняет неизменным распределение массы внутри.В трёхмерном пространстве и в случае отсутствия (других) связей абсолютно твёрдое тело обладает 6 степенями свободы: три поступательных и три вращательных. Абсолютно твёрдых тел в природе не существует, однако в очень многих случаях, когда деформация тела мала и ей можно пренебречь, реальное тело может (приближенно) рассматриваться как абсолютно твёрдое тело без ущерба для задачи.В рамках релятивистской механики понятие абсолютно твёрдого тела внутренне противоречиво, что показывает, в частности, парадокс Эренфеста. Другими словами, модель абсолютно твердого тела вообще говоря совершенно неприменима к случаю быстрых движений (сопоставимых по скорости со скоростью света), а также к случаю очень сильных гравитационных полей.
Существует пять видов движения твердого тела:
1) поступательное движение;
2) вращение вокруг неподвижной оси;
3) плоское движение;
4) вращение вокруг неподвижной точки;
5) свободное движение.
Первые два называются простейшими движениями твердого тела. Поступательным называется такое движение твердого тела, при котором любая прямая, проведенная в этом теле, перемещается, оставаясь параллельной своему начальному направлению.
Поступательное движение не следует смешивать с прямолинейным. При поступательном движении тела траектории его точек могут быть любыми кривыми линиями.Свойства поступательного движения определяются следующей теоремой: при поступательном движении все точки тела описывают одинаковые (при наложении совпадающие) траектории и имеют в каждый момент времени одинаковые по модулю и направлению скорости и ускорения. Вращательным движением твердого тела вокруг неподвижной оси называется такое его движение, при котором какие-нибудь две точки, принадлежащие телу (или неизменно с ним связанные), остаются во все время движения неподвижными. Так как расстояния между точками твердого тела должны оставаться неизменными, то очевидно, что при вращательном движении все точки, принадлежащие оси вращения, будут неподвижны, а все остальные точки тела будут описывать окружности, плоскости которых перпендикулярны оси вращения, а центры лежат на этой оси. Основными кинематическими характеристиками вращательного движения твердого тела являются его угловая скорость и угловое ускорение.
 угловая скорость!
угловая скорость!
 угловое ускорение!
угловое ускорение!
Моментом импульса относительно неподвижной оси z называется скалярная величина Lz, равная проекции на эту ось вектора момента импульса, определенного относительно произвольной точки О данной оси. Момент импульса Lz не зависит от положения точки О на оси z. При вращении абсолютно твердого тела вокруг неподвижной оси z каждая отдельная точка тела движется по окружности постоянного радиуса ri с некоторой скоростью vi. Скорость vi и импульс mivi перпендикулярны этому радиусу, т. с. радиус является плечом вектора mivi. Поэтому можем записать, что момент импульса отдельной частицы равен  и направлен по оси в сторону, определяемую правилом правого винта.
и направлен по оси в сторону, определяемую правилом правого винта.
Момент инерции — скалярная физическая величина, мера инертности тела во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле: момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества (точки, прямой или плоскости).
Единица измерения СИ: кг·м².
Обозначение: I или J.
Различают несколько моментов инерции — в зависимости от многообразия, от которого отсчитывается расстояние точек (осевой, центробежный,геометрический, центральный).
Теоре́ма Гю́йгенса — Ште́йнера, или просто теорема Штейнера (названа по имени швейцарского математика Якоба Штейнера и голландского математика, физика и астронома Христиана Гюйгенса): момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела JC относительно параллельной ей оси, проходящей через центр масс тела, и произведения массы тела m на квадрат расстояния d между осями:

где
JC — известный момент инерции относительно оси, проходящей через центр масс тела,
J — искомый момент инерции относительно параллельной оси,
m — масса тела,
d — расстояние между указанными осями.
Вопрос 13: Основного уравнения динамики вращательного движения и формулируется следующим образом: изменение момента количества движения твердого тела, равно импульсу момента всех внешних сил, действующих на это тело.  или
или 
В механике — динамические и кинематические уравнения, используемые при изучении движения твёрдого тела; даны Л. Эйлером в 1765.
Динамические Э. у. представляют собой дифференциальные уравнения движения твёрдого тела вокруг неподвижной точки и имеют вид
Ix + (Iz — Iy) wywz = Mx,
Iy + (Ix — Iz) wzwx = My, (1)
Iz + (Iy — Ix) wxwy = Mz,
где Ix, Iy, Iz — моменты инерции тела относительно гл. осей инерции, проведённых из неподвижной точки, wх,wу,wz — проекции мгновенной угловой скорости тела на эти оси, Mx, My, Mz — гл. моменты сил, действующих на тело, относительно тех же осей;,, — проекции углового ускорения.
Кинематические Э. у. дают выражения wх,wу, wz через Эйлеровы углы j, y, q и имеют вид
wx= sin q sinj + cosj,
wу= sin q cosj — sinj, (2)
wz= + cos q.
Система уравнений (1) и (2) позволяет, зная закон движения тела, определить момент действующих на него сил, и, наоборот, зная действующие на тело силы, определить закон его движения.
Кинетическая энергия вращательного движения

где Iz — момент инерции тела относительно оси вращения. ω — угловая скорость.
При повороте тела на малый угол вокруг оси Z совершается работа

Мощность

Вопрос 14: ОСИ ИНЕРЦИИ главные - три взаимно перпендикулярные оси, которые можно провести через любую точку твердого тела, отличающиеся тем, что если тело, закрепленное в этой точке, привести во вращение вокруг одной из них, то при отсутствии внешних сил оно будет продолжать вращаться вокруг этой оси, как вокруг неподвижной. Оси, относительно которых центробежный момент инерции обращается в нуль, называются главными осями инерции. Если начало такой системы помещено в центре тяжести фигуры, то это будут главные центральные оси.
Гироскоп — устройство, способное реагировать на изменение углов ориентации связанного с ним тела относительно инерциальной системы координат, как правило, основанное на законе сохранения вращательного момента (момента импульса). Термин впервые введен Жаном (Бернаром Леоном) Фуко в его докладе в 1852 году Французской Академии Наук. Доклад был посвящён способам экспериментального обнаружения вращения Земли в инерциальном пространстве. Этим обусловлено и название «гироскоп». Основные типы гироскопов по количеству степеней свободы:
2-степенные (интегрирующие, дважды интегрирующие, дифференцирующие);
3-степенные;
Основные два типа гироскопов по принципу действия:
механические гироскопы,
оптические гироскопы.
По режиму действия гироскопы делятся на:
датчики угловой скорости,
указатели направления.
Однако одно и то же устройство может работать в разных режимах в зависимости от типа управления.
Гироскопический эффект вращающихся тел есть проявление коренного свойства материи — её инертности.
Упрощённо, поведение гироскопа описывается уравнением:

где векторы М и L являются, соответственно, моментом силы, действующей на гироскоп, и его моментом импульса, скаляр I — его моментом инерции, векторы  и
и  угловой скоростью и угловым ускорением.
угловой скоростью и угловым ускорением.
Наблюдать прецессию достаточно просто. Нужно запустить волчок и подождать, пока он начнёт замедляться. Первоначально ось вращения волчка вертикальна. Затем его верхняя точка постепенно опускается и движется по расходящейся спирали. Это и есть прецессия оси волчка.Главное свойство прецессии — безинерционность: как только сила, вызывающая прецессию волчка, пропадёт, прецессия прекратится, а волчок займёт неподвижное положение в пространстве.Можно получить эффект прецессии, не дожидаясь замедления вращения волчка: толкните его ось (приложите силу) — начнётся прецессия. С прецессией напрямую связан другой эффект, также показанный на иллюстрации — это нутация — колебательные движения оси прецессирующего тела. Скорость прецессии и амплитуда нутации связаны со скоростью вращения тела (изменяя параметры прецессии и нутации в случае, если есть возможность приложить силу к оси вращающегося тела, можно изменить скорость его вращения).
Вопрос 15: В подавляющем большинстве случаев описания движения жидкостей и газов нет необходимости рассматривать молекулярную структуру – так как размеры движущихся объемов жидкости, размеры движущихся в жидкости твердых тел значительно превышают размеры молекул. Поэтому в этих случаях используется модель сплошной среды. В рамках этой модели газ или жидкость рассматривается как среда, все характеристики которой плавно и непрерывно изменяются от одной геометрической точки к другой. В рамках такой модели можно вводить «точечные» характеристики среды (например, плотность, удельная теплоемкость, вязкость, показатель преломления, удельное электрическое сопротивление) и рассматривать их как функции координат точек среды. Если свойства среды одинаковы во всех точках пространства, то такая среда называется однородной. С точки зрения математики использование модели сплошной среды означает переход от дискретного к непрерывному описанию.
Уравнение непрерывности:

Векторное поле — это отображение, которое каждой точке рассматриваемого пространства ставит в соответствие вектор с началом в этой точке. Например вектор скорости ветра в данный момент времени изменяется от точки к точке и может быть описан векторным полем.В физике термин векторное поле, кроме общего значения, описанного выше, имеет специальное значение, в основном в отношении фундаментальных полей (см. ниже). Смысл этого употребления сводится к тому, что фундаментальные физические поля классифицируются по природе их потенциала, и один из таких типов — векторные поля (как электромагнитное или глюонное поля).Термины поле и силовые линии поля (англ. field, lines of force) ввёл в физику Майкл Фарадей около 1830 г. при исследовании электромагнитных явлений. Основы аналитической теорию силовых полей разработали Максвелл, Гиббс и Хевисайд во второй половине XIX века.
16) Идеальная жидкость - воображаемая жидкость, лишённая вязкости и теплопроводности. В И. ж. отсутствует внутр. трение, т. е. нет касат. напряжений между двумя соседними слоями, она непрерывна и не имеет структуры. Такая идеализация допустима во мн. случаях течения, рассматриваемых в гидроаэромеханике, и даёт хорошее описание реальных течений жидкостей и газов на достаточном удалении от омываемых твёрдых поверхностей и поверхностей раздела с неподвижной средой.
При движении идеальной жидкости не происходит превращения механической энергии во внутреннюю, поэтому выполняется закон сохранения механической энергии
Стационарным принято называть такой поток жидкости, в котором не образуются вихри. В стационарном потоке частицы жидкости перемещаются по неизменным во времени траекториям, которые называются линиями тока. Опыт показывает, что стационарные потоки возникают только при достаточно малых скоростях движения жидкости.
| ΔV = l1S1 = l2S2 или υ1S1 = υ1S1. |
Условие несжимаемости записывается в виде:
Здесь ΔV – объем жидкости, протекшей через сечения S1 и S2.
Если участки трубы расположены на разной высоте, то ускорение жидкости вызывается совместным действием силы тяжести и силы давления. Сила давления – это упругая сила сжатия жидкости. Несжимаемость жидкости означает лишь то, что появление упругих сил происходит при пренебрежимо малом изменении объема любой части жидкости.
При перемещении жидкости силы давления совершают работу:
| ΔA = p1S1l1 – p2S2l2 = p1S1υ1Δt – p2S2υ2Δt = (p1 – p2)ΔV. |
Это и есть уравнение Бернулли. Из него следует, что сумма 
Из уравнения Бернулли следует:Давление в жидкости, текущей по горизонтальной трубе переменного сечения, больше в тех сечениях потока, в которых скорость ее движения меньше, и наоборот, давление меньше в тех сечениях, в которых скорость больше.
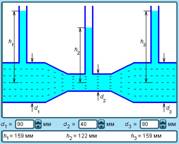 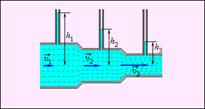
| |||||||
Рисунок 1.22.2. Измерение давления в потоке жидкости с помощью манометров. υ1 < υ2 < υ3; h1 > h2 > h3 |

Это выражение для скорости истечения называют формулой Торричелли.
Одной из таких задач является изучение сил, действующих на крыло самолета. Строгое теоретическое решение этой задачи чрезвычайно сложно, и обычно для исследования сил применяются экспериментальные методы. Уравнение Бернулли позволяет дать лишь качественное объяснение возникновению подъемной силыкрыла.
Циркуляция воздуха, обусловленная силами вязкого трения, возникает и вокруг вращающегося тела (например, цилиндра). При вращении цилиндр увлекает прилегающие слои воздуха, вызывая его циркуляцию. Если такой цилиндр установить в набегающем потоке воздуха, то возникнет сила бокового давления, аналогичная подъемной силе крыла самолета. Это явление называется эффектом Магнуса. Рис. 1.22.5 иллюстрирует обтекание вращающегося цилиндра набегающим потоком. Эффект Магнуса проявляется, например, при полете закрученного мяча при игре в теннис или футбол.
Итак, во многих явлениях аэродинамики существенную роль играют силы вязкого трения. Они приводят к возникновению циркулирующих потоков воздуха вокруг крыла самолета или вокруг вращающегося тела, к появлению силы сопротивления среды и т. д. Уравнение Бернулли не учитывает сил трения. Его вывод основан на законе сохранения механической энергии при течении жидкости или газа. Поэтому с помощью уравнения Бернулли нельзя дать исчерпывающего объяснения явлений, в которыхпроявляются силы трения. В этих случаях можно руководствоваться только качественными соображениями – чем больше скорость, тем меньше давление в потоке газа.
Особенно заметно проявляются силы вязкого трения при течении жидкостей. У некоторых жидкостей вязкость настолько велика, что применение уравнение Бернулли может привести к качественно неверным результатам. Например, при истечении вязкой жидкости через отверстие в стенке сосуда ее скорость может быть в десятки раз меньше рассчитанной по формуле Торричелли. При движении сферического тела в идеальной жидкости оно не должно испытывать лобового сопротивления. Если же такое тело движется в вязкой жидкости, то возникает сила сопротивления, модуль которой пропорционален скорости υ и радиусу сферы r(закон Стокса)
|
17) Уравнение Бернулли 
Вязкость, внутреннее трение, свойство текучих тел (жидкостей и газов) оказывать сопротивление перемещению одной их части относительно другой. В. твёрдых тел обладает рядом специфических особенностей и рассматривается обычно отдельно.
Сила вязкого трения (сила сопротивления)- Это явление возникновения касательных сил, препятствующих перемещению частей жидкости или газа друг по отношению к другу. Особенность силы вязкого трения в том, что она обращается в нуль вместе со скоростью.

Коэффициент кинематической вязкости — отношение динамической вязкости жидкости или газа к их плотности. Выражают в квадратных метрах в секунду (м2/с) Сила внутреннего трения между двумя слоями прямо пропорциональна площади их соприкосновения  и градиенту скорости
и градиенту скорости


 Существует два режима течения жидкостей. Течение называется ламинарным (слоистым), если вдоль потока каждый выделенный тонкий слой скользит относительно соседних, не перемешиваясь с ними, и турбулентным (вихревым), если вдоль потока происходит интенсивное вихреобразование и перемешивание жидкости (газа).
Существует два режима течения жидкостей. Течение называется ламинарным (слоистым), если вдоль потока каждый выделенный тонкий слой скользит относительно соседних, не перемешиваясь с ними, и турбулентным (вихревым), если вдоль потока происходит интенсивное вихреобразование и перемешивание жидкости (газа).
Ламинарное течение жидкости как правило наблюдается при небольших скоростях ее движения. Внешний слой жидкости, примыкающий к поверхности трубы, в которой она течет, из-за сил молекулярного сцепления прилипает к ней и остается неподвижным. Скорости последующих слоев тем больше, чем больше их расстояние до поверхности трубы, при этом наибольшей скоростью обладает слой, который движется вдоль оси трубы.
При турбулентном течении частицы жидкости приобретают составляющие скоростей, которые перпендикулярны течению, и они могут двигаться из одного слоя в другой. Скорость частиц жидкости быстро возрастает по мере удаления от поверхности трубы, затем изменяется незначительно. Так как частицы жидкости могут перейти из одного слоя в другой, то их скорости в различных слоях мало отличаются. Из-за большого градиента скоростей у поверхности трубы обычно происходит образование в