1. Введение.
Курсовая работа по теории автоматического управления «Исследование устойчивости и качества системы автоматического управления движением относительно центра масс летательного аппарата в канале крена» посвящена задачам устойчивости и качества линейных систем автоматического управления (САУ), решению которых предшествует обсуждение принципиальных вопросов построения и процесса синтеза САУ, формирования и линеаризации математической модели системы.
Выбранная для анализа и синтеза система управления движением относительно продольной оси летательного аппарата при всей своей простоте позволяет применить изучаемые в теоретическом курсе методы на практике, в том числе: синтез структурной схемы системы, построение математической модели системы управления, исследование устойчивости методами Рауса-Гурвица, Михайлова и Найквиста и анализ качества управления.
2. Система управления движением летательного аппарата
относительно центра масс.
2.1. Принципы управления угловым движением
летательного аппарата.
Управление движением летательного аппарата (ЛА), полет которого происходит в атмосфере Земли, осуществляется с помощью аэродинамических органов управления, к которым относятся руль высоты, руль направления и элероны. Создавая моменты относительно центра масс, эти органы управления изменяют угловое положение ЛА, что позволяет управлять действующими на ЛА силами и формировать желаемую траекторию.
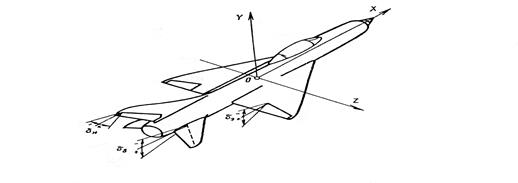
На рис. 2.1. и 2.2. показаны органы управления для различных типов самолетов, на рис. 2.3. правила знаков для отклонения руля высоты (dв), руля направления (dн) и элеронов (dэ).
Управление движением ЛА относительно центра масс обеспечивает установку и поддержание заданных значений угловых координат. Этот процесс часто называют угловой стабилизацией, а систему управления движением относительно центра масс – системой угловой стабилизации ЛА. Эта система содержит три канала, каждый из которых предназначен для стабилизации объекта управления относительно осей прямоугольной декартовой системы координат, связанной с летательным аппаратом.
Угловое движение ЛА относительно продольной оси определяется углом крена (рис. 2.4.), управление этим угловым движением осуществляет канал крена системы управления, а органом управления в этом канале являются элероны. Поскольку момент крена, как и всякий момент, пропорционален расстоянию от точки приложения силы до оси вращения, элероны на самолетах располагаются на концах крыльев (рис. 2.1. – 2.4.). Это дает возможность при одинаковой аэродинамической силе, возникающей на элеронах, получить больший момент управления.


|
|
|

|
|


|

|
Рис. 2.5. Принципиальная схема управления движением относительно
центра масс (угловой стабилизации) летательного аппарата.
Принципиальная схема управления движением летательного аппарата (самолета) относительно центра масс приведена на рис. 2.5. и содержит все необходимые элементы системы управления: объект управления, измерительные, задающие и сравнивающие устройства, устройство формирования закона управления, исполнительный механизм и органы управления.
2.2. Задача управления
Современные воздушные лайнеры предоставляют пассажирам высочайший уровень комфортности, при котором пребывание в салоне самолета по ощущениям практически не отличается от обычных наземных условий. Для этого, в частности, необходимо, чтобы самолет летел строго горизонтально, а значит угол крена (g) должен быть приведен к величине, близкой к нулевому значению и поддерживаться таким, пока не потребуется совершить маневр разворота. Решение этой задачи требует выдерживания угловой скорости по крену (g) на уровне, близком к нулю.
Для беспилотных летательных аппаратов выдерживание близких к нулю значений угла крена и угловой скорости по крену обеспечивает наилучшие условия работы навигационной аппаратуры и аппаратуры наведения в режиме обзора зоны расположения цели, обнаружения и выбора цели.
В результате задача управления угловым движением ЛА в канале крена (задача угловой стабилизации крена) формулируется как задача приведения к нулевым значениям угла крена и угловой скорости по крену и выдерживания этих условий в течение маршевого полета.
А это означает, что в рамках рассматриваемой задачи
gз = 0;

где: gз – заданное значение угла крена;
 - заданное значение угловой скорости по крену.
- заданное значение угловой скорости по крену.
Имя в виду, что система управления работает по отклонению, значения отклонений от заданного угла крена и угловой скорости крена
Dg = g - gз = g

равны самим значениям угловых координат в креновом движении. С учетом этого нет необходимости в специальном задающем устройстве в системе управления, и этот блок можно исключить из структурной схемы.
2.3. Синтез системы управления.
При проектировании системы сначала неизвестно, как будет выглядеть вся система в целом, либо отдельная её часть. Задача состоит в том, чтобы создать систему, надлежащим образом выполняющую свои функции. Эта задача называется задачей синтеза. Именно задача синтеза и является основной в процессе проектирования.
Рассмотренные и решенные в предыдущем параграфе задачи являются первыми шагами процесса синтеза системы стабилизации ЛА в канале крена:
- определена цель управления: управление угловым движением относительно продольной оси ЛА для создания комфортных условий полета;
- выбраны переменные, подлежащие управлению: угол крена и угловая скорость крена;
- сформированы требования к этим переменным (g @ 0;
 ).
).
Дальнейшие этапы в синтезе системы управления состоят в определении конфигурации системы, задании структуры регулятора и определении основных его параметров.
В общем виде процесс синтеза системы управления может быть представлен в виде следующей схемы (рис. 2.6.).

Рис. 2.6. Процесс синтеза системы управления
Конфигурация системы, обладающая желаемым качеством, обычно включает в себя объект управления, измерительное устройство, регулятор, исполнительное устройство.
Исполнительное устройство, независимо от выбранного типа должно быть способно эффективно влиять на поведение объекта управления. После выбора конфигурации системы управления необходимо получить модели для каждого из элементов системы управления.
Следующий шаг состоит в выборе регулятора, который часто представляет собой сумматор, выполняющий операцию сравнения желаемого и действительного значений выходной переменной объекта, и следующий за ним усилитель сигнала ошибки.
Заключительный шаг процедуры синтеза состоит в настройке параметров системы, которые обеспечивали бы желаемые показатели качества. Если в результате подбора параметров достигаются желаемые показатели качества, то процесс синтеза на этом заканчивается. В противном случае, возможно, потребуется заменить конфигурацию системы или выбрать исполнительное устройство с улучшенными характеристиками. После этого необходимо повторить все этапы синтеза до тех пор, пока не будут удовлетворены требования, предъявляемые к системе или пока не будет принято решение, что эти требования являются слишком жесткими и их необходимо ослабить.
2.4. Структурная схема системы управления в канале крена.
Система автоматического управления угловым движением ЛА называется автопилотом. Управление в канале крена осуществляется путем отклонения элеронов, в результате чего возникает момент за счет аэродинамической силы на элеронах. Вследствие этого происходит вращение ЛА вокруг продольной оси, изменяющее угол крена в нужном направлении. Элероны приводятся в действие исполнительным механизмом, который называется рулевым приводом.
Типичная структурная схема автопилота в канале крена приведена на рис. 2.7.
 |

Рис. 2.7. Функциональная схема автопилота в канале крена.
Автопилот в канале крена содержит СГ – свободный гироскоп, который измеряет угол крена (g), ДУС – датчик угловой скорости, который измеряет скорость вращения относительно продольной оси ( ), регулятор, формирующий сигнал управления (sэ), рулевой привод, приводящий в действие элероны, отклонения которых (dэ) воздействуют на ЛА – летательный аппарат.
), регулятор, формирующий сигнал управления (sэ), рулевой привод, приводящий в действие элероны, отклонения которых (dэ) воздействуют на ЛА – летательный аппарат.
Система управления работает следующим образом: угол крена и угловая скорость, измеренные СГ и ДУС, соответственно поступают на вход регулятора, который формирует управляющий сигнал. В соответствии с этим сигналом посредством рулевого привода отклоняются элероны, изменяющие угол крена или поддерживающие его заданное значение.
2.5. Математическая модель системы управления.
2.5.1. Модель объекта управления.
Движение ЛА относительно продольной оси происходит под действием аэродинамического момента и описывается дифференциальным уравнением:
 (2.1.)
(2.1.)
В этом уравнении:
 - момент инерции относительно продольной оси;
- момент инерции относительно продольной оси;
 - угловая скорость вращения относительно продольной оси;
- угловая скорость вращения относительно продольной оси;
Мх – аэродинамический момент относительно продольной оси.
Величина Мх определяется из соотношения
 ,
,
где:  - скоростной напор,
- скоростной напор,
S – площадь крыла,
l - размах крыла,
mx = mx (wx, dэ) – безразмерный коэффициент момента,
r - плотность воздуха,
V – скорость полета,
dэ – отклонение элеронов.
Для получения линейной модели объекта управления прибегнем к стандартной процедуре линеаризации уравнения (2.1.) относительно установившегося значения wx * и dэ *, которое будем считать невозмущенным, и которое удовлетворяет уравнению
 . (2.2.)
. (2.2.)
При этом полагаем, что изменения высоты и скорости полета незначительно влияют на параметры углового движения, в силу чего вариации высоты и скорости при линеаризации не учитываются, и, соответственно, величина скоростного напора постоянна.
Приращение варьируемых параметров:
 ,
,
и уравнение (2.1.) для возмущенного движения:
 ,
,
 .
.
С учетом соотношения (2.2.) получаем линеаризованное уравнение движения ЛА относительно продольной оси
 (2.3.)
(2.3.)
В аэродинамике летательных аппаратов приняты следующие обозначения:
 ;
;  ,
,
где:  ,
,  - безразмерные коэффициенты.
- безразмерные коэффициенты.
С учетом этих обозначений уравнение (2.3.) приобретает вид:
 (2.4.)
(2.4.)
Переходя к принятой в теории автоматического управления форме записи, получим:
 (2.5)
(2.5)
Здесь следует заметить, что в силу нулевых значений установившегося движения  величины приращений
величины приращений  и
и  в уравнении (2.4.) совпадают с самими значениями этих переменных.
в уравнении (2.4.) совпадают с самими значениями этих переменных.
Введем обозначения для динамических коэффициентов:
 - коэффициент демпфирования;
- коэффициент демпфирования;
 - коэффициент эффективности элеронов.
- коэффициент эффективности элеронов.
В результате уравнение (2.5.) или математическая модель объекта управления в угловом движении относительно продольной оси представляется линейным дифференциальным уравнением
 (2.6.)
(2.6.)
или
 .
.
Обозначим:

и получим в этих обозначениях математическую модель объекта управления в виде системы линейных дифференциальных уравнений:


(2.7.)
 ,
,
которая приводится к одному линейному уравнению второго порядка
 , (2.8.)
, (2.8.)
которому соответствует передаточная функция объекта управления
 , (2.9)
, (2.9)
в которой входным сигналом является отклонение элеронов dэ, а выходным – угол крена, как это показано на рис. 2.8.

Рис. 2.8. Передаточная функция объекта управления
2.5.2. Математическая модель рулевого привода.
Математическая модель рулевого привода представляет собой интегрирующее звено с отрицательной об  ратной связью, структурная схема модели представлена на рис. 2.9.
ратной связью, структурная схема модели представлена на рис. 2.9.

Рис. 2.9. Структурная схема модели рулевого привода
Работа рулевого привода описывается дифференциальным уравнением:
 , (2.10.)
, (2.10.)
а передаточная функция может быть получена из структурной схемы
 , (2.11.)
, (2.11.)
где  .
.
2.5.3. Математическая модель измерительных устройств
Для целей нашей работы будем считать измерительные устройства (свободный гироскоп и датчик угловой скорости), представленные на функциональной схеме (рис. 2.7.) идеальными, чему соответствуют их передаточные функции
 ;
;
 ,
,
а это означает, что измеренные значения угла крена и угловой скорости не отличаются от их истинных значений.
2.5.4. Закон управления.
Регулятор, представленный на функциональной схеме автопилота в канале крена (рис. 2.7.), представляет собой устройство, которое реализует закон управления, т.е. вырабатывает управляющий сигнал на вход рулевого привода s э в зависимости от значений угла крена g и угловой скорости  . Этот объем информации о выходных переменных объекта регулирования позволяет применить ПД – регулятор (пропорционально-дифференциальный), передаточная функция которого
. Этот объем информации о выходных переменных объекта регулирования позволяет применить ПД – регулятор (пропорционально-дифференциальный), передаточная функция которого
 , (2.12.)
, (2.12.)
а формируемый им закон управления имеет вид
 (2.13.)
(2.13.)
Коэффициенты  и
и  называются передаточными числами (соответственно по позиционному и демпфирующему сигналам или по свободному гироскопу и по демпфирующему гироскопу). Именно передаточные числа в рамках фиксированной конфигурации системы управления являются тем инструментом, с помощью которого можно добиться желаемого качества работы системы управления. Меняя величины передаточных чисел (или, другими словами, выполняя их настройку) можно улучшить работу системы управления, добиваясь желаемого качества ее работы.
называются передаточными числами (соответственно по позиционному и демпфирующему сигналам или по свободному гироскопу и по демпфирующему гироскопу). Именно передаточные числа в рамках фиксированной конфигурации системы управления являются тем инструментом, с помощью которого можно добиться желаемого качества работы системы управления. Меняя величины передаточных чисел (или, другими словами, выполняя их настройку) можно улучшить работу системы управления, добиваясь желаемого качества ее работы.
2.5.5. Математическая модель контура
стабилизации ЛА в канале крена.
Разработанные в этом разделе (2.5.) математические модели отдельных элементов функциональной схемы контура стабилизации крена (рис. 2.7.) дают возможность построить математическую модель системы управления угловым движением ЛА в канале крена.
Эта математическая модель представлена на рис. 2.10. и её исследование является основной задачей курсовой работы
|

|

|




Рис. 2.10. Математическая модель управления креном летательного аппарата
3. Содержание курсовой работы
3.1. Исходные данные.
Значения динамических коэффициентов С 1 и С 3 для выполнения курсовой работы необходимо взять в соответствии с номером варианта курсовой работы из рис. 3.1.
Передаточные числа определяются из соотношения
 ;
;  ;
;
а постоянную времени рулевого привода следует принять
 .
.
Все полученные параметры сводятся в таблицу исходных данных:
Таблица исходных данных
| С 1[с-1] | С 2[с-2] |
|
[с]
|  [с-1]
[с-1]
| Т [с] | Трп [с] |
3.2. Переходная функция объекта управления.
Переходная функция объекта управления представляет собой реакцию летательного аппарата на единичное отклонение элеронов dэ = -1° при нулевых начальных условиях. Для получения переходной функции необходимо решить дифференциальное уравнение (2.8.) при указанных выше условиях. Такое решение может быть получено аналитическим способом или путем численного решения этого дифференциального уравнения.
Для применения численного метода необходимо привести исходное дифференциальное уравнение (2.8.) к нормальной форме Коши


(3.1.)
 ,
,
и применить к этой системе любой метод численного интегрирования, в частности, метод Эйлера.
По результатам расчета необходимо построить переходную характеристику объекта управления, представив на графике переходные функции угла крена (g) и угловой скорости крена ( ).
).
3.3. Передаточная функция системы в режиме стабилизации.
Для выполнения этого задания необходимо определить передаточную функцию замкнутой системы управления на основании математической модели, представленной на рис. 2.10.
В этом разделе должны быть получены:
- Передаточная функция разомкнутой системы.
- Передаточная функция замкнутой системы.
- Оператор воздействия.
- Дифференциальное уравнение математической модели замкнутой системы.
- Характеристическое уравнение замкнутой системы.
|
3.4. Передаточная функция системы в режиме управления.
В режиме управления система управления креном должна обеспечивать изменение угла крена в соответствии с его заданным значением gз ¹ 0.
Такой режим работы системы управления характерен для выполнения координированного разворота ЛА по курсу, а система управления в этом случае работает в режиме следящей системы. Структурная схема математической модели контура управления угловым движение ЛА в канале крена представл  ена на рис. (3.2.).
ена на рис. (3.2.).
Рис. 3.2. Математическая модель управления креном
Применительно к этой математической модели необходимо выполнить задания 1 – 6 предыдущего раздела и сравнить операторы воздействия, собственные операторы и характеристические уравнения для структурных схем рис. 2.10 и рис. 3.2.
3.5. Определение устойчивости по критерию Рауса-Гурвица.
Для характеристического уравнения системы сформулировать необходимое условие устойчивости. Воспользовавшись достаточным условием устойчивости по критерию Рауса-Гурвица покажите устойчивость системы.
Если анализ показал, что принятые передаточные не обеспечивают устойчивость системы их величины необходимо откорректировать и после того, как будет обеспечена устойчивость системы, вынести соответствующие изменения в таблицу исходных данных.
3.6. Определение устойчивости по частотному критерию Михайлова.
Сформулируйте критерий устойчивости, основанный на поведении годографа, постройте годограф Михайлова для анализируемой системы и покажите её устойчивость.
Сформулируйте критерий устойчивости, основанный на совместном анализе вещественной U(w) и мнимой V(w) функций Михайлова, определите их корни и на основе их анализа покажите устойчивость системы.
3.7. Определение области допустимых параметров системы.
Запишите характеристическое уравнение системы в параметрической форме, т.е. в такой форме, когда коэффициенты характеристического уравнения являются функциями от параметров системы. Используя необходимое условие устойчивости в сочетании с достаточным условием по критерию Рауса-Гурвица определите области допустимых параметров системы:
- область устойчивости по передаточным числам (
 ) при принятом а исходных данных значении постоянной времени рулевого привода Трп;
) при принятом а исходных данных значении постоянной времени рулевого привода Трп; - область устойчивости по передаточному числу и постоянной времени Трп при условии
 .
.
Постройте области допустимых значений параметров, обеспечивающих устойчивость системы, соответственно в плоскости () и в плоскости (Трп, ).
4. Частотный критерий устойчивости Найквиста.
4.1. Формулировка критерия Найквиста.
Частотный критерий устойчивости был предложен Г.Найквистом в 1932 г. и до сих пор остается фундаментальным методом анализа устойчивости линейных систем управления. Критерий Найквиста позволяет определить устойчивость системы с отрицательной обратной связью – замкнутой системы – по экспериментально снятой или полученной на основе передаточной функции амплитудно-фазовой частотной характеристике разомкнутой системы. Критерий Найквиста формулируется для системы с единичной обратной связью, структурная схема которой приведена на рис. 4.1.


Рис. 4.1. Структурная схема замкнутой системы.
На этой схеме W (p) – передаточная функция разомкнутой системы, по которой и будет делаться заключение об устойчивости системы. Для систем с неединичной отрицательной обратной связью предварительно необходимо произвести размыкание системы, которое можно выполнить произвольным образом (рис. 4.2.), а вход и выход системы следует рассматривать в месте разрыва. В результате искомая передаточная функция будет иметь вид.

 |
Рис. 4.2. Структурная схема системы общего вида.
Именно с этим видом мы имеем дело в нашем рассмотрении системы управления креном летательного аппарата (рис. 2.10.).
Поэтому в первую очередь необходимо привести эту структурную схему (рис. 2.10.) к структурной схеме замкнутой системы с единичной обратной связью. Такая схема имеет вид, приведенный на рис. 4.3., а передаточная функция разомкнутой системы представляет собой результат последовательного соединения четырех звеньев прямой цепи
 ,
,
 где
где  .
.
Рис. 4.3. Структурная схема математической модели управления креном,
приведенная к единичной отрицательной обратной связи.
Формулировка критерия Найквиста: Для устойчивости замкнутой системы необходимо и достаточно, чтобы амплитудно-фазовая характеристика устойчивой разомкнутой системы при изменении w от 0 до +¥ не охватывала точку с координатами (- 1, j 0).
Примеры расположения частотных характеристик, соответствующих устойчивой и неустойчивой замкнутым системам, представлены на рис. 4.4.


..
Рис. 4.4. Иллюстрация критерия Найквиста.
1 – устойчивая, 2 – неустойчивая замкнутые системы.
4.2. Астатические системы.
Система автоматического управления называется статической, если в ее разомкнутом контуре не содержатся интегрирующие звенья, если же разомкнутый контур содержит интегрирующие звенья, то система называется астатической. Количество интегрирующих звеньев называется порядком астатизма. В частности, система на рис. 4.4. имеет первую степень астатизма.
Частотные характеристики, иллюстрирующие критерий Найквиста на рис. 4.4.принадлежат статическим системам, а поведение частотных амплитудно-фазовых характеристик для астатической системы первого порядка представлено на рис. 4.5.


.
Рис. 4.5. Иллюстрация критерия Найквиста для астатической системы первого порядка.
1 – устойчивая, 2 – неустойчивая замкнутые системы.
4.3. Запасы устойчивости.
Приближение амплитудно-фазовой частотной характеристики устойчивой системы к точке (-1, j0) повышают опасность потери устойчивости, поскольку реальные характеристики технических систем имеют допуски, математические модели описывают поведение системы с определенной точностью и т.д. Для того, чтобы гарантировать устойчивость системы в этих условиях, от нее требуется некоторый запас устойчивости, который характеризуется двумя величинами: запасом устойчивости по фазе и запасом устойчивости по амплитуде. Обе эти величины в комплексе дают оценку удаления амплитудно-фазовой характеристики разомкнутой системы от точки (-1, j0).
Запас устойчивости по фазе определяют как величину угла
j = p - ÷y(wс)÷ (4.1.)
для частоты wс, при которой ÷W(wс)÷ = 1,
запас устойчивости по амплитуде – как величину отрезка оси абсцисс h, заключенного между критической точкой (-1, j0) и амплитудно-фазовой характеристикой (рис. 4.6.)

Рис. 4.6. Определение запасов устойчивости по фазе и амплитуде.
4.4. Анализ устойчивости по логарифмическим