С.И. ВОЛКОВ А.А. КАРГАПОЛЬЦЕВ Н.Н. КУРИЛОВ
РАДИОЛОКАЦИОННАЯ СИСТЕМА
ПОСАДКИ РСП-6М2
УЧЕБНОЕ ПОСОБИЕ
МОСКВА 2010
ББК 32.95
Р 15
УДК 621.396.967: 351.814
Рецензенты: канд.воен.н., доцент И.И. Шерстяк,
канд.техн.н., доцент В.А. Голоднов.
Р 15 Волков С.И., Каргапольцев А.А., Курилов Н.Н. Радиолокационная система посадки РСП-6М2: Учебное пособие. / Государственное образовательное учреждение высшего профессионального образования «Московский государственный институт радиотехники, электроники и автоматики (технический университет)». – М., 2010. – 153 с.
Рассматриваются предназначение, состав, тактико-техничес-кие характеристики и размещение на аэродроме радиолокационной системы посадки РСП-6М2, принципы действия каналов и устройств входящих в состав РСП-6М2 диспетчерского (ДРЛ-6М2) и посадочного (ПРЛ-6М2) радиолокаторов, приведены общие сведения об аппаратуре пеленгования, радиосвязи, объективного контроля, системе энергоснабжения и распределения питания РСП-6М2, а также требования к тактическим и техническим характеристикам РСП. Учебное пособие написано для студентов военных кафедр, обучающихся по программе подготовки офицеров запаса по ВУС 461700.
Табл. 6. Ил. 56. Библиогр.: 6 назв.
Печатаются по решению редакционно-издательского совета университета.
ISBN 5-7339-0211-6 © С.И. Волков,
А.А. Каргапольцев,
Н.Н. Курилов, 2010
© МИРЭА, 2010
ВВЕДЕНИЕ
Радиолокаторы различного назначения являются неотъемлемым элементом любой современной системы управления воздушным движением. К ним относятся обзорные (диспетчерские) радиолокаторы, посадочные, метеорологические и радиолокаторы обзора летного поля [1].
Наиболее важными из них являются обзорные (диспетчерские) и посадочные радиолокаторы, объединенные в радиолокационную систему посадки (РСП).
Основной задачей радиолокаторов РСП является обеспечение контроля и управления воздушным движением в районе аэродрома.
В рамках этой основной задачи с помощью радиолокационных систем посадки решаются задачи обнаружения воздушных судов, измерения их координат и параметров движения, радиолокационного опознавания на командно-диспетчерских пунктах (КДП) или командных пунктах (КП). Кроме этого, через РСП с воздушных судов группе руководства полетами (ГРП) может передаваться дополнительная информация: бортовой номер, высота, остаток топлива и т.п.
Передача радиолокационной информации от РСП к КДП может выполняться как по широкополосному кабелю (кабелям), так и по широкополосной радиотрансляционной линии.
Контуры управления воздушными судами могут функционировать как в ручном, так и в полуавтоматическом режимах, автоматизированных систем управления полетами (АСУП).
В последние годы, с поступлением на вооружение новых высокоточных радиолокаторов, в АСУП стало возможным реализовать автоматический режим управления, например, на этапе посадки.
Среди наземных радиотехнических средств самолетовождения и посадки значительное место занимают радиолокационные системы посадки самолетов типа РСП-6, РСП-7, РСП-8, РСП-10, РСП-11 и их модификации, играющие важную роль в процессе обеспечения управления летательными аппаратами (ЛА).
Радиолокационные системы посадки предназначены для посадки самолетов, оборудованных обычными связными радиостанциями, в сложных метеоусловиях днем и ночью. РСП является необходимым дополнением к средствам инструментальной посадки и позволяет решать задачи вывода самолетов в район аэродрома, наблюдения за воздушной обстановкой и регулирования воздушного движения в районе аэродрома, опознавания отдельных самолетов и групп самолетов, обеспечения захода и расчета на посадку путем задания летчику (экипажу) самолета курса посадки и глиссады снижения по командам с земли. Использование РСП позволяет повысить безопасность полетов, надежность радиолокационного контроля.
В состав радиолокационной системы посадки входят обзорно-диспетчерский (ОДРЛ) и посадочный (ПРЛ) радиолокаторы, а также радиопеленгаторы и средства связи.
Пространственное положение самолета, заходящего на посадку, относительно заданной линии планирования в РСП определяется с помощью специального посадочного радиолокатора. ПРЛ обеспечивает секторный обзор пространства в зоне взлетно-посадочной полосы (ВПП) в плоскости курса и глиссады планирования. Уклонение самолета от заданных курса и глиссады регистрируется на экранах курсового и глиссадного индикаторов радиолокатора. Одновременно по индикаторам определяется расстояние от самолета до точки приземления. Учитывая данные о положении самолета относительно линии планирования, руководитель посадки передает по радио на борт самолета команды, выполняя которые летчик выводит самолет на ВПП. ПРЛ позволяет обеспечить снижение самолетов любых типов вне видимости земли до высоты примерно 50 м.
В качестве ПРЛ широкое применение получили РЛС сантиметрового диапазона волн. Высокая точность и разрешающая способность угломерных измерений у такого локатора обеспечивается за счет использования остронаправленных антенн. Точность и разрешающая способность по дальности достигаются применением коротких импульсов. Обзор рабочего сектора осуществляется сканированием двух остронаправленных ДН во взаимно перпендикулярных плоскостях. Для борьбы с помехами, вызванными отражением сигналов от местных предметов, РСП используют методы селекции движущихся целей (СДЦ), а для увеличения дальности действия предусмотрен активный режим работы с самолетным ответчиком (СО).
Обзорно-диспетчерские радиолокаторы систем РСП используются для опознавания и контроля полетов самолетов в ближней зоне радиусом 50…60 км. По отметкам от самолетов, наблюдаемых на индикаторах кругового обзора (ИКО) диспетчерских радиолокаторов, осуществляются объективный контроль воздушной обстановки, регулирование движения на предпосадочных этапах и вывод самолета с заданной точностью в зону действия ПРЛ.
Использование выносных индикаторов РСП, установленных непосредственно на КДП, обеспечивает высокую степень информированности ГРП и оперативность выдаваемых данных о воздушной обстановке.
РСП имеют ограниченную пропускную способность, не исключают погрешностей при выдаче данных из-за ошибок операторов и подверженности помехам за счет отражений от рельефа местности и метеофакторов. В связи с этими ограничениями РСП при посадке используются в качестве дублирующих систем.
В настоящее время аэродромы Военно-воздушных сил Российской Федерации (ВВС РФ) в основном оснащены радиолокационными системами посадки РСП-10МН и РСП-6М2.
ОБЩИЕ СВЕДЕДЕНИЯ О РАДИОЛОКАЦИОННОЙ СИСТЕМЕ ПОСАДКИ РСП-6М2
Предназначение и состав
Радиолокационная система посадки РСП-6М2 предназначена для решения задач основных звеньев АСУП (рис.1.1): звена получения информации о фактической траектории полета ЛА и звена передачи экипажу ЛА информации, необходимой для коррекции траектории полета. Звено получения информации о траектории полета ЛА составляют средства радиолокации (CРЛ), а звено передачи информации составляют средства радиосвязи (СРС). Объектом управления являются ЛА, вручную пилотируемые летчиком по данным приборного оборудования (ПО) и командам управления, принимаемым радиостанцией (РС). Группа руководителей полетами и средства представления информации, используемые ею, составляют звено обработки информации и формирования команд управления.
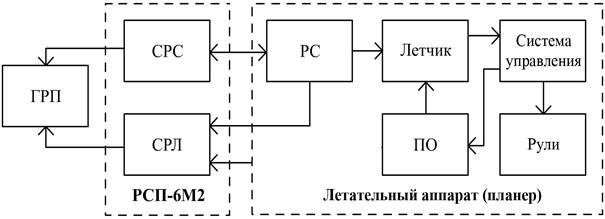
Рис.1.1. Структурная схема АСУП на базе РСП-6М2
В АСУП на базе РСП-6М2 реализуется ручной метод управления ЛА (летчик вручную исполняет команды управления) в два этапа. Первый этап включает: управляемый вывод ЛА в ближнюю зону (рис.1.2); полет ЛА в ближней зоне по заданной траектории на заданном эшелоне; выход определенного (назначаемого) ЛА в зону посадки. На этом этапе управление ЛА (летчиком) с помощью команд осуществляет руководитель полетами в ближней зоне (РБЗ). Второй этап включает заход ЛА на посадку с выходом на заданную линию планирования (ЗЛП) и снижение по ней до начала визуальной посадки ЛА.
Данная АСУП используется для управления ЛА, не оборудованных аппаратурой радиомаячных систем посадки.
В состав РСП-6М2 входят:
1. Посадочная радиолокационная станция ПРЛС-6М2 (рис.1.3), включающая -
- диспетчерский радиолокатор ДРЛ-6М2;
- посадочный радиолокатор ПРЛ-6М2;
- автоматический радиопеленгатор АРП-11(Е-519);
- аппаратуру фоторегистрации радиолокационной информации;

Рис.1.2. Распределение воздушного пространства в районе аэродрома

Рис.1.3. Посадочная радиолокационная станция ПРЛС-6М2
два магнитофона МН-61 для регистрации аудиоинформации;
три радиостанции Р-863;
радиотрансляционную линию Е-531;
средства проводной радиосвязи.
2. Передвижная автономная электростанция ПЭП-6М2, включающая -
- два дизельных агрегата АД30-Т/230/Ч-400;
- преобразователь частоты ВПЛ-30МД;
- преобразователь напряжения ПО-500;
- щит распределения электропитания.
Электропитание РСП-6М2 осуществляется от трехфазной промышленной электросети напряжением 220/380 В и частотой 50 Гц через преобразователь частоты ВПЛ-30МД или от одного из двух дизельных агрегатов.