Электропривод в современных технологиях
Учебно-методическое пособие по курсовому
проектированию для студентов направления
13.03.02 «Электроэнергетика и электротехника»
всех форм обучения
Барнаул 2015
УДК 621.312
Стальная, М. И., Еремочкин, С.Ю. Электропривод в современных технологиях: Учебно-методическое пособие по курсовому проектированию для студентов направления 13.03.02 «Электроэнергетика и электротехника» всех форм обучения / М. И. Стальная, С. Ю. Еремочкин. – Барнаул: Изд-во АлтГТУ, 2015. – 29 с.
Учебно-методическое пособие представляет собой комплекс заданий к курсовому проекту по дисциплине «Электропривод в современных технологиях» и краткие методические указания по его оформлению. При выполнении курсового проекта ставятся задачи, связанные с закреплением знаний по одному из базовых курсов специальности; развитием практических навыков по расчету электромеханических систем; умение самостоятельно применять приобретенные знания при решении конкретных инженерных задач; расширением практики пользования учебной, монографической, справочной литературой; углублением навыков по выполнению графических работ и составлению технической документации.
Рассмотрено и утверждено
на заседании кафедры
«Электротехника и
автоматизированный электропривод»
Протокол №11
от 11.06.2015 г.
© ФГБОУ ВПО «Алтайский государственный технический университет им. И. И. Ползунова», 2015
© Стальная Мая Ивановна, 2015
© Еремочкин Сергей Юрьевич, 2015
СОДЕРЖАНИЕ
1.Задание ..…………………..……………………………………………... 4
2. Пример выполнения курсового проекта ……………………………... 17
3.Разработка системы управления на основе полученного алгоритма ………………………………………………………………………… 19
4. Программа на языке программирования STL ………..……………… 23
5. Согласование сигналов датчиков с входами схемы и выходных сигналов с нагрузкой …………………………………….…………………….... 26
Заключение ……………………………………….………………………. 29
Библиографический список ……………………………………………… 30
ЗАДАНИЕ
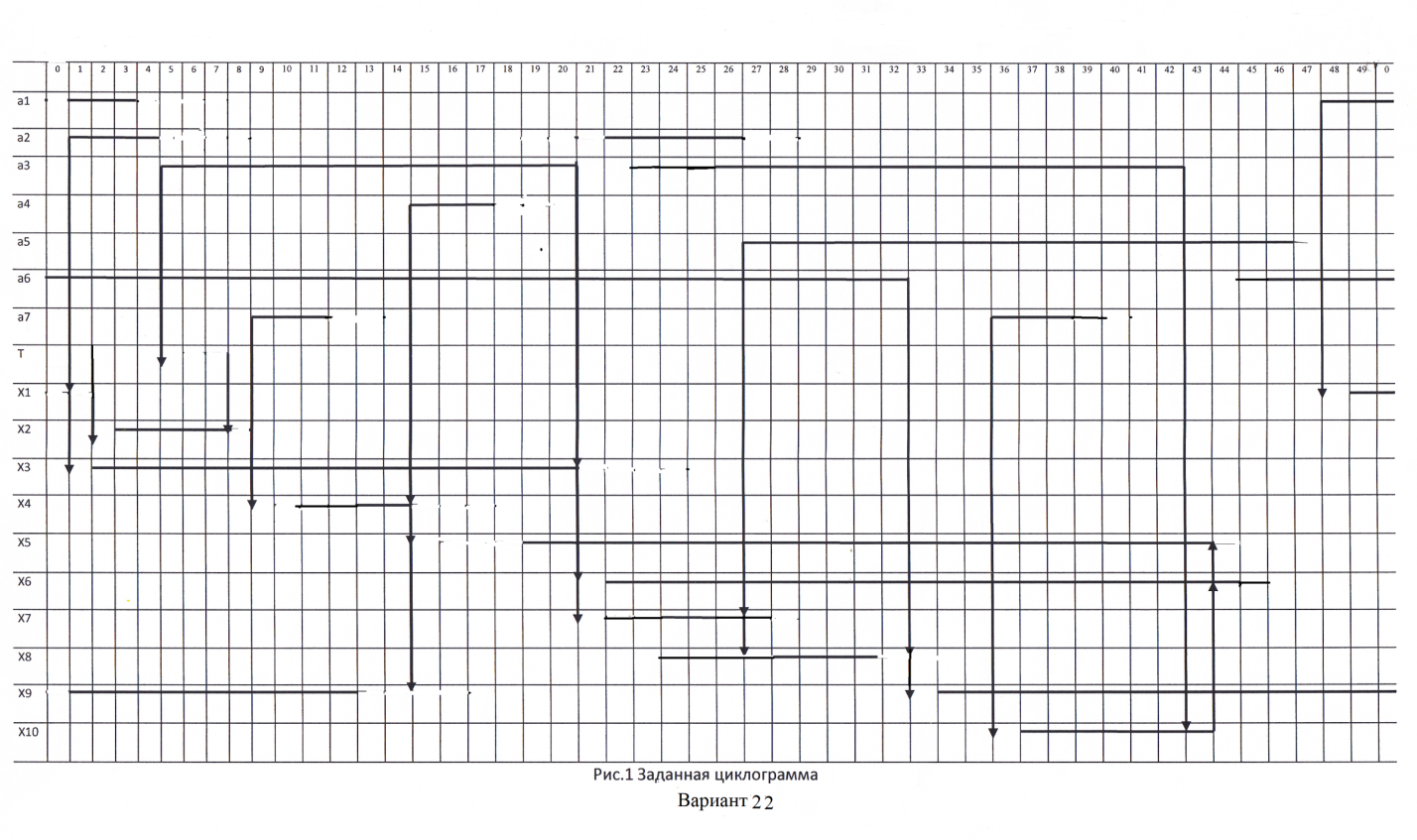
Разработать систему (схему) управления механизмами, составляющими определенный технологический комплекс. Циклограмма агрегата задается по варианту. При разработке системы управления возможно использование программируемого контроллера или схемы с использованием логических элементов той или иной интегральной серии.
Параметры датчиков и нагрузки.
a1  a3 – индукционный датчик, 24 В;
a3 – индукционный датчик, 24 В;
а4 - датчик тока, 10 В;
a5 a7 -фотодатчик, 12 В;
х5 - тиристор-двигатель, 10 В; 0,5 А;
x6 x7 - реле, 100 В; 0,1 А;
x8 x10 - контактор, ~220 В; 0,5 А;
T – время.
| № | Вариант | |||||
| А | (а4 ÷ a3) индук. датчик | |||||
| a4 датчик тока | ||||||
| a5 ÷ a7 фотодатчик | ||||||
| Б | X5 Тир – дв-ль | 10В, 0,5А | 12В, 1А | 14В, 0,8А | 10В, 1А | 12В, 2А |
| В | X6 ÷ X7 Реле | 100В, 0,1А | 50В, 0,1А | 60В, 0,2А | 70В, 0,3А | 80В, 0,4А |
| X 8 ÷ X 10 контактор | ~220В, 0,5А | ~220В, 1А | ~220В, 2А | ~110В, 0,2А | ~110В, 1А | |
| Г | Время Т | |||||
| Тип логики, серия | И-Не КS61 | Контр. | ИЛИ- НЕ К176 | Контр. | И-НЕ К156 |
Таблица 1 – Варианты заданий























ПРИМЕРНОЕ СОДЕРЖАНИЕ ПОЯСНИТЕЛЬНОЙ ЗАПИСКИ
Введение.
1. Задание на проектирование. Исходные данные.
2. Получение алгоритма логического устройства.
3. Разработка системы управления на основе полученного алгоритма.
4. Программа на языке программирования STL.
5. Согласование сигналов датчиков с входами схемы и выходных сигналов с нагрузкой.
Заключение.
Список использованных источников.
2 ПРИМЕР ВЫПОЛНЕНИЯ КУРСОВОГО ПРОЕКТА
Для каждого периода включения выходной переменной составляется исходное уравнение в виде произведения условия включения и инверсии условия отключения.
Полученные выражения подвергаются первой проверке, по результатам
которой в необходимых случаях вводится самоблокировка.
Производится вторая Проверка, которая проверяет, существует ли
отключающий сигнал весь включающий период неизменным. Если это условие не выполняется, вводиться дополнительная переменная pi так, чтобы переменная изменила своё значение после того, как отключающий сигнал изменит свое состояние.
Производится третья проверка. Смысл ее состоит в следующем: необходимо убедиться, что каждая конъюнкция йодной дизъюнктивной формы выходной переменной обращается в ноль во всех без исключения тактах отключающих периодов. Если это условие не выполняется, необходимо ввести промежуточную переменную pi которая обращает в ноль данную конъюнкцию только в обнаруженных тактах. В качестве pi желательно использовать любую да входных или выходных переменных, которая удовлетворяет этим требованиям.
После проведения трех проверок алгебраические выражения для каждой выходной переменной по возможности минимизируются на основе законов алгебры логики.
1) Выходная переменная X1:
X1=a∙  2;
2;
2) Выходная переменная X2:
x2=  1∙T
1∙T  1∙
1∙  a2 = 1
a2 = 1  + 1 2
+ 1 2  1 2p1+ 1p1 ( 2+ );
1 2p1+ 1p1 ( 2+ );
3) Выходная переменная X3:
x3=a2∙a3  a2+x3∙a3
a2+x3∙a3  a2+x3a3a2
a2+x3a3a2  a2x3+x3a3a2=a2(x3+x3a3);
a2x3+x3a3a2=a2(x3+x3a3);
4) Выходная переменная X4:
x4=a7∙ 4 a7+x4 4  a7a6+x4 4;
a7a6+x4 4;
5) Выходная переменная X5:
x5=a4∙x10 a4+x5∙x10 a4+x5  1+x5∙ 10 a
1+x5∙ 10 a  +x5 1x5x10a5;
+x5 1x5x10a5;
6) Выходная переменная X6:
x6= 3∙x10  3+x6x10
3+x6x10  3+x6 5+x6∙ 10
3+x6 5+x6∙ 10  3x9+x6 5+x6 10a5;
3x9+x6 5+x6 10a5;
7) Выходная переменная X7:
x7= 3∙ 5  3+x7 5;
3+x7 5;
8) Выходная переменная X8:
x8=a5∙a6 a5a6p1;
9) Выходная переменная X9:
x9= 6∙ 4 6∙x9 4  6(x5+x3)+ x9 4;
6(x5+x3)+ x9 4;
10) Выходная переменная X10:
x10=a7a3 a7+x10a3 a7x3+x10a3;
11) Введенная переменная P1:
p1=T∙a5  T+p1a5
T+p1a5  T+p1a5a6=T+p1 5+p1 6 T+p1 5a6+p1 6
T+p1a5a6=T+p1 5+p1 6 T+p1 5a6+p1 6
РАЗРАБОТКА СХЕМЫУПРАВЛЕНИЯ НА ОСНОВЕ ПОЛУЧЕННОГО АЛГОРИТМА
Алгоритм будет реализован на программируемом контроллере Siemens Simatic S7-200.
Разработку схемы начнем с выбора процессора и необходимых модулей расширения. Тип процессора: CPU 224 с источником питания переменного тока, входы постоянного тока, релейные выходы. Процессор содержит 14 встроенных входов и 10 встроенных выходов. Дополнительные модули устанавливать не нужно, так как модуль процессора содержит необходимое число входов 1 выходов.
Серия S7-200 - это ряд программируемых логических микроконтроллеров, которые могут управлять разнообразными прикладными системами автоматизации. Компактная конструкция, низкая стоимость и мощная система команд делают контроллеры S7-200 идеальным средством решения для управления малыми приложениями. Большое разнообразие размеров CPU и напряжений и инструментальные средства программирования на основе Windows обеспечивают необходимую гибкость при решении ваших задач автоматизации.
Серия продуктов S7-200 была перепроектирована с целью уменьшения
размеров, увеличения скорости и расширения функциональных возможностей. Новые продукты S7-200 предназначены для замены предыдущих изделий.
Отличительные особенности семейства SIMATIC S7-200:
• время выполнения 1Кб логических инструкций не превышает 0.37 мс;
• наличие скоростных счетчиков внешних событий;
• наличие быстродействующих входов внешних прерываний;
• возможность наращивания количества обслуживаемых входов-выходов(за исключением систем на основе CPU)
• наличие импульсных выходов (ШИМ или ЧИМ);
• потенциометры аналогового задания цифровых параметров;
• часы реального времени (встроенных или устанавливаемых в виде субмодуля)
• мощный набор инструкций языка программирования;
• последовательный РР I -интерфейс, который может быть использован в качестве свободно программируемого интерфейса;
• функции ведущего устройства AS-интерфейса, обеспечиваемые
коммуникационным модулем СР 243-2;
• функции ведомого устройства PROFIBUS-DP, обеспечиваемые
коммуникационным модулем 277;
• дружественная оболочка программирования STEP 7 Micro/Win;
• трехуровневая парольная защита программ;
• возможность работы с устройствами человеко-машинного интерфейса,
Приведем основные характеристики CPU 224 в таблице 1.
Для программирования такого вида контроллеров используется пакет
программ Step 7 Micro/Win работающий в операционной системе Windows или Step 7 Micro/Dos работающий под управлением системы MS-DOS или
программатор. Если программирование наполняется через последовательный
интерфейс компьютера (RS 232), то для подключения контроллера необходим PC/PPI кабель. Программирование может выполняться с программаторов или компьютеров, оснащенных коммуникационными процессорами СР 5511 или СР 5611. Связь с контроллером в этом случае устанавливается по MPI интерфейсу. STEP 7 Micro/Win позволяет выполнять все операции по программированию контроллера SIMATIC SP200, их конфигурированию и программированию, а также решать вопросы конфигурирования и программирования PPI сетей, устройств человеко-машинного интерфейса, систем регулирования, обеспечивает
поддержку OS’S протокола.
Для программирования всех типов центральных процессоров могут быть использованы языки LAD (Ladder Diagram - диаграммы лестничной логики), STL (Statement List - список инструкций) и FBD (Function Block Diagram – диаграммы функциональных блоков),
Описание языка программирования STL:
Будем описывать только те функции, которые используются для логических контроллеров то есть битовые логические команды.
• Логические команды (описаны не все логические команды, а только
наиболее распространенные):
L-(LOAD) - загрузка переменной с указанным адресом на первый уровень стека, при этом значение на первом стеке сдвигается на второй.
LN-(LOAD NOT) - загрузка инверсии переменной с указанным адресом на первый уровень стека.
A-(AND) - логическое умножение переменной с указанным адресом на переменную на первом уровне стека, результат записывается на первый уровень стека при этом переменная записанная до этого на первом уровне стека сгорает.
О-(OR) - логическое сложение умножение переменной с указанным
адресом на переменную на первом уровне стека, результат записывается на первый уровень стека,
AN-(AND NOT) - логическое умножение инверсии переменной с
указанным адресом на переменную на первом уровне стека при этом переменная записанная до этого на первом уровне стека сгорает.
ON-(OR NOT) - логическое сложение инверсии переменной с указанным адресом на переменную на первом уровне стека.
= - возбуждение выхода с указанным адресом, при этом переменная беретсяс первого уроня стека.
| Основные технические характеристики CPU 224 | |
| количество входов прерываний | 4, программируемые на обработку нарастающего или спадающего фронта. |
| количество счетчиков | 6 суммирующих или вычитающих счетчика с входной частотой до З0 кГц 32 бита, включая знаковый разряд. |
| • импульсные выходы | 2 скоростных выхода, способные формировать прерывания. Частота следования вы- ходных сигналов до 20кГц. ШИМ или ЧИМ. |
| Коммуникационный интерфейс: Шина расширения ввода-вывода | RS485 Для подключения модулей ввода-вывода или коммуникационного модуля. |
| встроенных входов встроенных выходов потенциометров аналогового задания цифровых параметров | 14 дискретных входов, включая 4 входа прерываний и 6 каналов скоростного счета 10 дискретных выходов, включая 2 для выполнения встроенных функций 2 (разрешающая способность 8 бит) |
| Количество модулей расширения | |
| Степень защиты Диапазон рабочих температур Относительная влажность | IP в соответствии с ШС 529 0... +45°С 5... 95% |
| Напряжение питания L-/L1: допустимый диапазон изменений частота переменного тока Входной ток | ~120...230В ~85...264В 47..,63Гц 35... 220мА |
| Напряжение питания входов (встроенный источник питания): • номинальное значение • допустимый диапазон изменений | =24В/280мА ~20.4... 28.8В |
| Количество входов процессора входное напряжение «1» входное напряжение «0» | 24 (15..35)В 0..5В |
| Изоляция входных цепей | оптоэлектронная |
| Количество выходов процессора Тип выходного ключа Напряжение питания выходных цепей L+/L1 | реле =24В/ ~24...230В |
| Максимальный выходной ток | 2А |
| Количество циклов переключений контактов | 107 |
| Механических Электрических при номинальной нагрузке | 105 |
| Масса | 0,41 кг |
Таблица 2 – Основные технические характеристики
· Логические операции со стеком:
OLD –сложение переменной на первом уровне стека с переменной на
второй, результат записывается на первый, уровень стека, при этом глубина стека уменьшается на единицу и на последний уровень (8) загружается произвольное число;
ALD - умножение переменной на первом уровне стека с переменной на
второй, результат записывается на первый уровень, при этом глубина стека уменьшается на единицу.
Адресация входных и выходных переменных:
CPU S7-200 хранит информацию и различных ячейках памяти, имеющих уникальные адреса. Вы можете явно указать адрес в памяти, к которому вы хотите обратиться. Это позволяет вашей программе иметь прямой доступ к информации.
Для обращения к биту в области памяти вы указываете адрес, который
включает в себя идентификатор области памяти, адрес байта и номер бита.
Например, I1.2.Обращение в этом примере производится к области памяти “I” - вход (input), “l” - байт 1 (или номер модуля; 0 - основной модуль), следует точка, чтобы отделить адрес бита “2” (номер входа или клеммы входа).
В данной курсовой работе используются также области памяти “Q” -
выходные переменные.
Всем переменным присваиваются адреса. Присвоения указаны в таблице 2.
Таблица 2 – Переменные данные
| Символ | Адрес | Комментарий | |
| A1 | E0.0 | I0.0 | Входная переменная a1 |
| A2 | E0.1 | I0.1 | Входная переменная a2 |
| A3 | E0.2 | I0.2 | Входная переменная a3 |
| A4 | E0.3 | I0.3 | Входная переменная a4 |
| A5 | E0.4 | I0.4 | Входная переменная a5 |
| A6 | E0.5 | I0.5 | Входная переменная a6 |
| A7 | E0.6 | I0.6 | Входная переменная a7 |
| T | T1 | ||
| X1 | A0.0 | Q0.0 | Входная переменная x6 |
| X2 | A0.1 | Q0.1 | Входная переменная x7 |
| X3 | A0.2 | Q0.2 | Входная переменная x8 |
| X4 | A0.3 | Q0.3 | Входная переменная x9 |
| X5 | A0.4 | Q0.4 | Входная переменная x1 |
| X6 | A0.5 | Q0.5 | Входная переменная x2 |
| X7 | A0.6 | Q0.6 | Входная переменная x3 |
| X8 | A0.7 | Q0.7 | Входная переменная x4 |
| X9 | A1.0 | Q1.0 | Входная переменная x5 |
| X10 | A1.1 | Q1.1 | Входная переменная x10 |
| P1 | M0.1 | Промежуточная переменная p1 |