При измерении импульсных давлений применяются методы, основанные на зависимости физических свойств среды от давления, или методы, при которых гидростатическое давление передается некоторому телу и затем используется зависимость физических свойств тела от давления.
При использовании датчика, вносимого в среду, можно выделить следующие этапы преобразований:
а) преобразование поля давлений в среде в поле давлений на поверхности преобразователя;
б) преобразование поля давлений на поверхности в поле напряжений внутри преобразователя;
в) преобразование поля напряжений в деформацию преобразователя;
г) преобразование деформации в электрический сигнал и измерение электрического сигнала.
На рис. 14.5 датчик состоит из металлических стержней-волноводов 1 и 3 и пьезокерамического элемента 2. Деформационная волна, вызванная импульсом давления, распространяется по стержню 1, достигает границы пьезоэлемента, частично отражается от нее, частично проходит и вызывает деформацию пьезокерамики и появление электрического сигнала. Далее деформационная волна проходит в волновод 3, который должен быть достаточно длинным, чтобы на выходной сигнал не наложилась помеха, вызванная деформационной волной, отраженной от торца волновода 3.
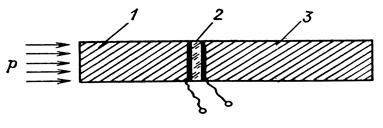
Рис. 14.5. Схема волноводного преобразователя
Преимуществом волноводных датчиков является задержка выходного сигнала на время пробега по волноводу 1 и, следовательно, возможность разделения во времени помехи, вызванной источником импульсного давления и выходного сигнала.
Принципы измерений параметров движения твердого тела
Движение твердого тела характеризуется движением его центра масс, оно полностью определяется тремя поступательными перемещениями центра масс и тремя углами поворота вокруг центра масс. Под параметрами движения твердого тела понимают линейные и угловые перемещения центра масс и все их производные во времени (перемещение, скорость, ускорение, резкость и т. д.).
Параметры движения – векторные величины. Поэтому их измерение осуществляется одним из двух путей:
а) определяются модули соответствующих векторов и углы, характеризующие положение этих векторов в выбранной системе отсчета;
б) определяются составляющие векторов по осям выбранной системы отсчета.
Принципы измерения параметров движения делятся на две группы:
а) абсолютные (инерциальные) принципы, в основе которых лежит принцип инерции (здесь справедливы законы Ньютона);
б) относительные принципы, при которых параметры движения одной системы координат измеряют относительно другой.
Погрешность этих принципов зависит не только от погрешности средств измерения, но и от погрешностей построения систем отсчета, а также от точности установки измерительных осей приборов по осям системы отсчета.
Относительные принципы
В этих принципах измеряются параметры движения движущегося тела относительно другого движущегося или неподвижного тела. Здесь применяются способы и средства измерений линейных и угловых перемещений, основанные на использовании емкостных, индуктивных, оптических и других преобразователей.
На рис. 15.1 пробное тело 2, выполненное в виде уголкового отражателя, свободно падает в вакуумированной трубе 1. Пройденный телом путь измеряется двулучевым интерферометром Майкельсона. В качестве источника излучения используется лазер 3. Интерференционная картина преобразуется фотоэлектронным умножителем 4 в последовательность импульсов, подсчет которых осуществляется счетчиками 5 и 6, управляемыми генератором частоты 7. Высокая точность достигается за счет применения стабилизированного лазера.
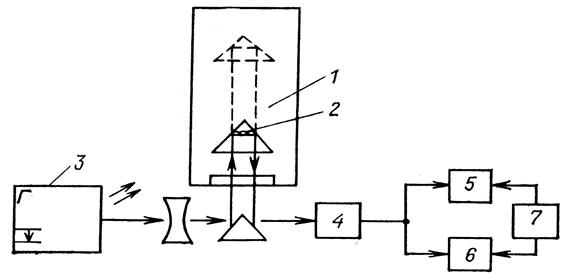
Рис. 15.1. Схема интерферометра для измерения
ускорения свободного падания
Для измерения параметров движения используются и принципы, основанные на применении эффектов Доплера и Мессбауэра [3].
Инерциальные принципы
В основе принципов лежит свойство инерции. Этими принципами измеряют линейные ускорения твердого тела и другие, связанные с ускорением параметры линейного движения.
Недостатком принципов является необходимость вносить поправки
на составляющие гравитационного ускорения по направлению измерительной оси акселерометра (прибора для измерения ускорения) либо строить такие системы отсчета, в которых этими системами можно пренебречь.
Для повышения точности применяют маятниковые приборы и приборы уравновешивающего преобразования.
Центр масс О1 гиромотора 1 (рис. 15.2) смещен по оси его вращения на расстояние ℓ от оси х его рамки 2, подвешенной в наружной рамке 3. Относительно оси наружной рамки ун прибор сбалансирован, и центр масс гиромотора при перпендикулярности осей z и ун расположен на оси ун. При ускорении, направленном по оси ун, момент относительно оси х уравновешивается гироскопическим моментом. Угол поворота α рамки 3 измеряется преобразователем 4. Недостатками являются методические погрешности, возникающие при работе на вращающемся основании.
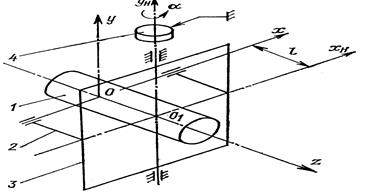
Рис. 15.2. Схема гироскопического акселерометра
Для измерения параметров движения применяются принципы, основанные на применении пьезоэлектрических, струнных и электрокинетических преобразователей [5].