в пакете MATLAB \ Simulink
Пример 1. Проведем моделирование однофазного выпрямителя со средней точкой, его расчет приведен в главе 2.2 (пример 1). Запустим MATLAB и вызовем приложение Simulink, создадим файл новой модели (Ctrl+N). Первоначально создадим упрощенную модель выпрямителя, с цепью источника приведенной к вторичной стороне трансформатора.
Блок идеального источника переменного напряжения “AC Voltage Source” находится в библиотеке “SimPowerSystems\Electrical Sources\”. Для перенесения стандартного блока в модель, необходимо щелкнуть левой кнопкой мыши на интересующем блоке в окне “Simulink Library Browser” и, удерживая ЛКМ, перетащить блок в окно модели. Для редактирования параметров блока следует дважды щелкнуть на нем ЛКМ и внести необходимые данные. Зададим параметры вторичной стороны (рис. 4.1):
- амплитуда ЭДС вторичной стороны (peak amplitude, V):  (В);
(В);
- начальная фаза ЭДС вторичной стороны (phase, deg): 0º (град);
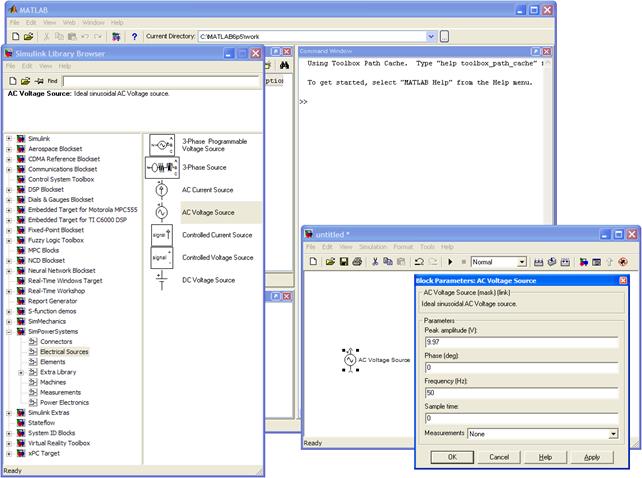
Рис. 4.1. Окно задания параметров блока источника “AC Voltage Source” библиотеки “SimPowerSystems\Electrical Sources\”.
- реальная частота ЭДС вторичной стороны (frequency, Hz):  (Гц).
(Гц).
Учтем активные сопротивления обмоток трансформатора, приведенные к фазе вторичной стороны. Используем стандартный блок последовательной RLC-цепи “Series RLC Branch” из библиотеки “SimPowerSystems\Elements\”. Зададим в блоке  (Ом), индуктивность цепи – ноль (пока не будем ее учитывать), емкость – inf (рис. 4.2).
(Ом), индуктивность цепи – ноль (пока не будем ее учитывать), емкость – inf (рис. 4.2).

Рис. 4.2. Окно задания параметров блока последовательной RLC-цепи
“Series RLC Branch” библиотеки “SimPowerSystems\Elements\”.
Так как применяется схема со средней точкой, то необходимо создать дополнительную вторичную обмотку. Нет необходимости создавать ее заново. Следует выделить уже созданный набор элементов, удерживая ЛКМ, скопировать их (Ctrl+C) и, щелкнув ЛКМ на свободной части модели, вставить (Ctrl+V).
Дополним модель блоками дискретных диодов “Diode” из библиотеки “SimPowerSystems\Power Electronics\” (рис. 4.3). Основные параметры диодов:
- сопротивление диода в открытом состоянии  (Ом);
(Ом);
- пороговое напряжение диода  = 0,8 (В);
= 0,8 (В);
Получим идеализированную ВАХ диода вида 3 (рис. 1.10). Цепь снаббера не используется, поэтому рекомендуется задавать  ,
,  - inf.
- inf.

Рис. 4.3. Окно задания параметров блока “Diode”.
Для соединения блоков следует щелкнуть ЛКМ на зажиме какого-либо блока и, удерживая ЛКМ, протянуть соединительную линию (провод) к зажиму другого блока. Выход одного блока может быть соединен с входом другого и наоборот. Соединение вход-вход и выход-выход блоков модели в MATLAB (версии 6.5) возможно только посредством соединительных элементов библиотеки “SimPowerSystems\Connectors\”. Используем блоки “Bus Bar (thin horiz)” для соединения всех элементов модели.
Дополним модель - конденсатором фильтра и цепью резистивной нагрузки, для чего используем стандартный блок последовательной RLC-цепи. Для удобства введем уникальные имена для этих блоков (рис. 4.4). Параметры конденсатора: С = 0,00378 (Ф), параметры нагрузки: R = 50 (Ом).
Можно воспользоваться набором команд меню, вызываемого при нажатии на блоке ПКМ, для редактирования его свойств. В подразделе “Format” содержатся команды “Rotate block” и “Flip block”, позволяющие повернуть блок, что удобно при его размещении в продольной или поперечной ветвях модели. Аналогичные действия можно выполнять с блоками соединителей “Bus Bar” и другими, для более удачного, с точки зрения восприятия, их размещения в области модели.
Оставим один измерительный вывод (m) диода VD1. Все неиспользуемые измерительные выводы в MATLAB рекомендуется замкнуть на заглушку “Terminator” (рис. 4.4) – элемент библиотеки “Simulink\Sinks\”.
После создания модели, ее следует сохранить под уникальным именем.
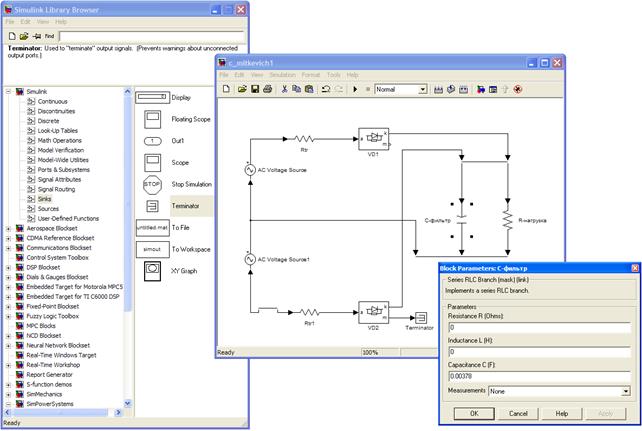
Рис. 4.4. Окно задания параметров С-фильтра.
Для измерения переменных состояния модель дополняется необходимыми измерительными блоками библиотеки “SimPowerSystems\ Measurements\” – идеальными вольтметрами “Voltage Measurement” и амперметрами “Current Measurement”. Только после измерения этими блоками переменные состояния становятся информационными сигналами и можно оценить их интегральные или спектральные характеристики. Для этого применяются стандартные блоки библиотеки “SimPowerSystems\Extra Library\Measurements\” и приложение SimPowerSystems - powergui.
Измерительный вывод (m) диода VD1 выдает обобщенный информационный вектор тока и напряжения диода. Для разделения сигналов используется стандартный блок библиотеки “Simulink\Signal Routing\” – “Demux”. В окне настройки параметров блока “Demux” задается только количество выходов блока, по умолчанию оно равно 2. Воспользуемся стандартным блоком библиотеки “SimPowerSystems\Extra Library\Measurements\” – “RMS” для измерения действующего значения тока диода. В окне настройки параметров блока “RMS” задается только основная реальная частота (Гц) – Fundamental frequency. По умолчанию она равна 60 Гц, поэтому для правильного измерения ее следует изменить на 50 Гц.
Дополним модель блоком “Voltage Measurement” для измерения напряжения на нагрузке. Для определения постоянной и амплитуды переменной составляющих этого сигнала воспользуемся стандартным блоком библиотеки “SimPowerSystems\Extra Library\Measurements\” – Фурье-анализатором “Fourier”. В окне настройки параметров блока “Fourier” задаются два параметра: основная (первая) реальная частота (Гц) – Fundamental frequency и номер гармонической в ряде Фурье. Для выделения постоянной и амплитуды 1-й гармонической составляющих необходимо два блока “Fourier”. Следует помнить, что основная частота пульсаций напряжения на конденсаторе превышает частоту сети переменного тока в m раз согласно формуле (2.27).
Для вычисления коэффициента пульсаций выпрямителя по первой гармонике  необходимо найти отношение амплитуды 1-й гармонической к постоянной составляющей ряда Фурье напряжения на конденсаторе (см. формулу 1.7). Математические действия с информационными сигналами осуществляются с применением стандартных блоков библиотеки “Simulink\Math Operations\”. Стандартный блок “Product” по умолчанию осуществляет перемножение двух сигналов, если в окне настройки параметров этого блока записать “ */ ”, то блок станет выполнять требуемые операции умножения и деления (рис. 4.5).
необходимо найти отношение амплитуды 1-й гармонической к постоянной составляющей ряда Фурье напряжения на конденсаторе (см. формулу 1.7). Математические действия с информационными сигналами осуществляются с применением стандартных блоков библиотеки “Simulink\Math Operations\”. Стандартный блок “Product” по умолчанию осуществляет перемножение двух сигналов, если в окне настройки параметров этого блока записать “ */ ”, то блок станет выполнять требуемые операции умножения и деления (рис. 4.5).
Величины интегральных или спектральных характеристик сигналов отражаются посредством стандартного блока библиотеки “Simulink\Sinks\” – “Display” (рис. 4.5).

Рис. 4.5. Окна модели и задания параметров блоков “Fourier” и “RMS”.
Включим в модель блок измерения углов отсечки вентилей (см. подглаву 3.1.4). Для корректной работы блока в командной строке MATLAB следует задать величину T = 0.02. Поскольку ток в нагрузке должен составлять 0,1 А, то шаг дискретизации “Quantization interval” в блоке “Quantizer” выберем 0,5%  , т.е. 0,0005. Поскольку измеряется ток вентиля, проводящего на положительной полуволне питающего напряжения, то время расчета должно быть кратно нечетному числу полупериодов Т /2.
, т.е. 0,0005. Поскольку измеряется ток вентиля, проводящего на положительной полуволне питающего напряжения, то время расчета должно быть кратно нечетному числу полупериодов Т /2.
Перед моделированием необходимо задать параметры моделирования в соответствующем меню модели “Simulation\Simulation Parameters…” (Ctrl+E) раздел Solver. По умолчанию выбирается решатель ode45 (Dormand-Prince), его настоятельно рекомендуется сменить на ode23tb (stiff/TR-BDF2), более подходящий для решения рассматриваемого класса задач. Улучшить точность расчета можно, если задать вручную максимальный расчетный шаг (max step size) - рекомендуется не более 1е-5 при частоте сети 50 Гц (рис. 4.6).
Для правильного расчета важно также корректно задать время окончания расчета (stop time). Время расчета должно быть всегда кратно полупериоду напряжения первичного источника, в этом случае все интегральные характеристики определяются верно. Следует помнить, что конденсатор фильтра первоначально разряжен и моделируется процесс его заряда, который не успеет завершиться и система не выйдет в квазиустановившийся режим, если выбрано малое время расчета. Время расчета рекомендуется выбирать не менее
 >
>  ,
,
где  - постоянная времени зарядной цепи. Для данного примера
- постоянная времени зарядной цепи. Для данного примера  сек, поэтому время расчета должно быть не менее 0,44 сек. Выберем время расчета - 0,61 сек (рис. 4.6).
сек, поэтому время расчета должно быть не менее 0,44 сек. Выберем время расчета - 0,61 сек (рис. 4.6).

Рис. 4.6. Окно настройки параметров моделирования.
Убедиться, что переходный процесс закончился и система вышла в квазиустановившийся режим можно, если дополнить модель стандартным блоком осциллографа “Scope” (“Simulink\Sinks\”). В параметрах блока “Scope” в разделе Data history следует отключить устанавливаемое по умолчанию ограничение на число выводимых расчетных точек (рис. 4.7).

Рис. 4.7. Окно настройки блока осциллографа “Scope”.
Для запуска процесса моделирования следует щелкнуть ЛКМ на соответствующей кнопке  “Start simulation” панели инструментов в окне модели. Результаты моделирования всей системы приведены на рис. 4.8.
“Start simulation” панели инструментов в окне модели. Результаты моделирования всей системы приведены на рис. 4.8.

Рис. 4.8. Модель однофазного выпрямителя со средней точкой, с цепью источника приведенной к вторичной стороне, и результаты моделирования.
Полученные на модели результаты сходятся с расчетными с очень высокой точностью: постоянное напряжение на нагрузке  = 4,999 В, эффективное значение тока через вентиль
= 4,999 В, эффективное значение тока через вентиль  = 0,1002 А, найденные углы отсечки составляют
= 0,1002 А, найденные углы отсечки составляют  =54,81º,
=54,81º,  =54º ( >
=54º ( >  ),
),  º - последний полностью совпадает с расчетным
º - последний полностью совпадает с расчетным  º.
º.
Несколько отличается от расчетного ( = 0,01) коэффициент пульсаций выпрямителя по первой гармонике
= 0,01) коэффициент пульсаций выпрямителя по первой гармонике  = 0,0116. Погрешность расчета
= 0,0116. Погрешность расчета  в данном случае составила 16%, что в целом для методики, с учетом хорошей сходимости интегральных характеристик, приемлемо. Поскольку величина связана с емкостью конденсатора фильтра обратной зависимостью, то для получения требуемого следует увеличить емкость в 1,16 раза до величины С = 0,00438 (Ф).
в данном случае составила 16%, что в целом для методики, с учетом хорошей сходимости интегральных характеристик, приемлемо. Поскольку величина связана с емкостью конденсатора фильтра обратной зависимостью, то для получения требуемого следует увеличить емкость в 1,16 раза до величины С = 0,00438 (Ф).
Учтем индуктивности рассеяния трансформатора и добавим их в соответствующих элементах модели (“Series RLC Branch”), проведем моделирование системы (рис. 4.9).

Рис. 4.9. Модель выпрямителя со средней точкой, с учтенными индуктивностями рассеяния трансформатора, и результаты моделирования.
Из данных рис. 4.9 видно, что индуктивность рассеяния трансформатора “затянула” импульс тока вентиля и, таким образом, повлияла соответственно на углы отсечки: уменьшился (был 54,81º стал 54,18º), увеличился (был 54º стал 55,53º),  в целом увеличился (был 54,4º стал 54,85º). Поскольку емкость конденсатора фильтра увеличена до С = 0,00438 (Ф), то имеем требуемый = 0,01.
в целом увеличился (был 54,4º стал 54,85º). Поскольку емкость конденсатора фильтра увеличена до С = 0,00438 (Ф), то имеем требуемый = 0,01.
Создадим аналогичную модель выпрямителя с линейным трансформатором “Linear Transformer” из библиотеки “SimPowerSystems\Elements\”. Параметры первичного источника “AC Voltage Source”:  (В), (Гц).
(В), (Гц).
При расчете модели трансформатора следует учитывать, что ориентировочные значения активного сопротивления обмоток и индуктивности рассеяния трансформатора в формулах (1.2) и (1.3), приведены к фазе вторичной обмотки, и обычно полагается, что выполняются равенства (1.4).
Определим параметры приведенной модели трансформатора, для чего воспользуемся некоторыми данными расчета (см. пример 1 в главе 2.2):
- номинальная мощность (nominal power Pn, VA):  = 1,2 ВА;
= 1,2 ВА;
- номинальная частота (nominal frequency fn, Hz): (Гц);
- действующее напряжение первичной стороны (V1 rms):  = 220 (В);
= 220 (В);
- действующее напряжение вторичной стороны (V2 rms):  = 7,05 (В).
= 7,05 (В).
Создадим m -файл – иконка  “New M-File” в окне MATLAB или через меню “File \ New” – M-file, в который занесем расчетные формулы (рис. 4.10).
“New M-File” в окне MATLAB или через меню “File \ New” – M-file, в который занесем расчетные формулы (рис. 4.10).
Через меню “View\Current Directory” MATLAB открываем каталог, где находится m -файл. Для запуска m -файла наводим на него курсор мыши в окне MATLAB и нажимаем ПКМ, из списка команд всплывающего меню выбираем ЛКМ - Run.

Рис. 4.10. Программа расчета параметров трансформатора.
После запуска m -файла получим в окне MATLAB следующие данные:
- базовое сопротивление первичной стороны  = 40333,3 (Ом);
= 40333,3 (Ом);
- базовое сопротивление вторичной стороны  = 41,419 (Ом);
= 41,419 (Ом);
- реальные параметры первичной обмотки R1 = 7236,8 (Ом), X1 = 208 (Ом);
- реальные параметры вторичной обмотки R2 = 7,432 (Ом), X2 = 0,214 (Ом);
Параметры первичной и вторичной обмоток, приведенные соответственно к первичной и вторичной сторонам через базовые сопротивления, должны быть равны, что и выполняется:
 = 0,1794 (о.е.),
= 0,1794 (о.е.),  = 0,0052 (о.е.).
= 0,0052 (о.е.).
В блок линейного трансформатора “Linear Transformer” можно заложить названия переменных из m -файла, в этом случае при новом сеансе в MATLAB придется повторно запустить m -файл, или численные значения переменных (рис. 4.11). В окне настройки параметров блока активирована строка “Three windings transformer”, т.е. трансформатор имеет две вторичные обмотки. Цепь намагничивания не учитывается, поэтому оставим параметры  и
и  - 500 (о.е.).
- 500 (о.е.).

Рис. 4.11. Окно задания параметров блока линейного трансформатора “Linear Transformer” (“SimPowerSystems\Elements\”).
Создадим модель выпрямителя с трансформатором и проведем моделирование системы (рис. 4.12). Из данных рис. 4.12 видно, что результаты в модели с трансформатором практически идентичны результатам в модели с цепью источника, приведенной к вторичной стороне трансформатора, и учтенными индуктивностями рассеяния (рис. 4.9).

Рис. 4.12. Модель выпрямителя с трансформатором и результаты моделирования.
Пример 2. Проведем моделирование однофазного мостового выпрямителя с трансформатором, его расчет приведен в главе 2.2 (пример 2). Запустим MATLAB и вызовем приложение Simulink, создадим файл новой модели (Ctrl+N). Параметры первичного источника “AC Voltage Source” (“SimPowerSystems\Electrical Sources\”):
- амплитуда ЭДС первичной стороны (peak amplitude, V): (В);
- начальная фаза ЭДС первичной стороны (phase, deg): 0º (град);
- реальная частота ЭДС первичной стороны (frequency, Hz): (Гц).
Определим параметры приведенной модели трансформатора “Linear Transformer”, расчетные формулы (рис. 4.13) при этом не будут отличаться от приведенных в предыдущем примере 1 (см. рис. 4.10). Основные параметры трансформатора заимствуются из данных расчета (см. пример 2 в главе 2.2).
После запуска m -файла получим следующие результаты:
- базовое сопротивление первичной стороны = 660,3 (Ом);
- базовое сопротивление вторичной стороны = 30,136 (Ом);
- реальные параметры первичной обмотки R1 = 38,34 (Ом), X1 = 17,21 (Ом);
- реальные параметры вторичной обмотки R2 = 1,75 (Ом), X2 = 0,785 (Ом).
Приведенные параметры первичной и вторичной обмоток:
= 0,0581 (о.е.), = 0,0261 (о.е.).

Рис. 4.13. Программа расчета параметров трансформатора.
Заложим полученные параметры в модель трансформатора “Linear Transformer” (рис. 4.14, а). В окне настройки параметров блока строку “Three windings transformer” необходимо деактивировать, так как необходима только одна вторичная обмотка. Цепь намагничивания не учитывается, поэтому оставим параметры и - 500 (о.е.).
Мостовой выпрямитель можно выполнить на дискретных элементах “Diode” или использовать стандартный блок “Universal Bridge” (“SimPowerSystems\Power Electronics\”). В окне настройки параметров блока “Universal Bridge” необходимо выбрать: 2 – число “плеч” моста (“Number of bridge arms”), Diodes – тип вентилей (“Power Electronic device”), сопротивление диода в открытом состоянии  (Ом),
(Ом),  = 0 (В) - поскольку в расчете пороговым напряжением диода пренебрегли (рис. 4.14, б).
= 0 (В) - поскольку в расчете пороговым напряжением диода пренебрегли (рис. 4.14, б).
Модель включает конденсатор фильтра и цепь резистивной нагрузки, для создания которых используем стандартные блоки последовательной RLC-цепи. Введем соответствующие уникальные имена для этих блоков. Параметры конденсатора: С = 0,002 (Ф), параметры нагрузки (рис. 4.14, в): R = 50 (Ом).
Для соединения электрических элементов модели используем блоки “Bus Bar (thin horiz)” из библиотеки “SimPowerSystems\Connectors\”.
Дополним модель необходимыми измерительными блоками (см. предыдущий пример). Включим в модель блок измерения углов отсечки вентилей (см. подглаву 3.1.4). Для корректной работы блока в командной строке MATLAB следует задать величину T = 0.02. Поскольку ток в нагрузке должен составлять 1 А, то шаг дискретизации “Quantization interval” в блоке “Quantizer” выберем 0,1%  , т.е. 0,001.
, т.е. 0,001.
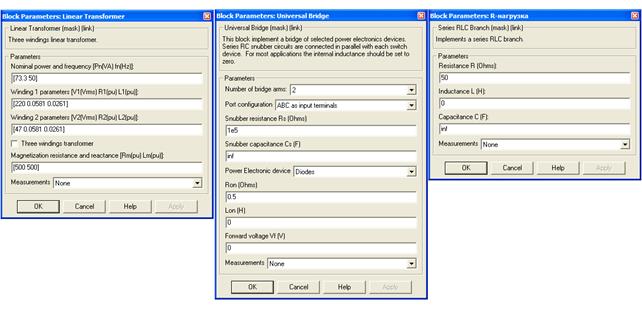
а) б) в)
Рис. 4.14. Окна задания параметров блоков модели выпрямителя.
Введем в модель стандартный блок осциллографа “Scope” (“Simulink\Sinks\”). Выведем на него напряжение на нагрузке и ток вторичной обмотки трансформатора, для чего в параметрах настройки блока (раздел General) изменим количество осей (number of axes) на – 2 (рис. 4.15, а). В разделе Data history следует отключить устанавливаемое по умолчанию ограничение на число выводимых расчетных точек (рис. 4.15, б). Активируем функцию “Save data to workspace” (рис. 4.15, б), что позволит в дальнейшем провести гармонический анализ данных сигналов.

а) б)
Рис. 4.15. Окна настройки блока осциллографа “Scope”.
Для гармонического анализа в модель следует добавить блок “powergui” (рис. 4.16) из “SimPowerSystems\”.
Помимо вычисления коэффициента пульсаций выпрямителя по первой гармонике , определим полный коэффициент пульсаций напряжения на нагрузке согласно формуле (1.6).
Для определения максимумов и минимумов напряжения на нагрузке используем блоки “Maximum” и “Minimum” библиотеки “DSP Blockset\Statistics\”. Для требуемой работы блоков в их параметрах следует задать режим (mode) - running. Для регистрации экстремумов функции в квазистатическом режиме необходимо сбрасывать данные, вычисленные блоками в переходном процессе. Для обнуления (сброса) удобно использовать напряжение идеального источника “AC Voltage Source”, сигнал сброса при этом формируется блоком “Sign” (“Simulink\Math Operations\”) при переходе напряжения через ноль (рис. 4.16). В настройках порта сброса “Reset port” блоков устанавливаем - either edge, т.е. сброс происходит как нарастающим (rising edge) так и спадающим (falling edge) фронтами.
Для работы блоков “Maximum” и “Minimum” все подаваемые на их входы непрерывные сигналы, в том числе сигналы сброса, необходимо предварительно дискретизировать по времени, иначе система выдаст сигнал об ошибке. Для этого применяется блок “Zero-Order Hold” библиотеки “Simulink\Discrete\”, в настройках которого необходимо задать шаг дискретизации, например 5e-6. Поскольку обнуление (сброс) блоков “Maximum” и “Minimum” осуществляется в моменты времени кратные полупериоду напряжения первичного источника, то необходимо передавать данные с их выходов на блоки “Display” с некоторой задержкой, иначе будем иметь по окончании расчета нули. Для задержки можно использовать как блок “Zero-Order Hold”, так и блок памяти “Memory” (“Simulink\Discrete\”).
Для определения постоянной составляющей напряжения на нагрузке можно использовать блок “Mean” библиотеки “DSP Blockset\Statistics\”. Особенности его настройки те же, что и для блоков “Maximum” и “Minimum”.
Для определения коэффициента пульсаций напряжения на нагрузке используем различные варианты формулы (1.6), очевидно результат должен получиться практически одинаковым. Для определения значения импульса тока через вентиль в квазиустановившемся режиме также используем блок “Maximum”.
После создания модели, ее следует сохранить под уникальным именем.
Перед моделированием необходимо задать параметры моделирования в соответствующем меню модели “Simulation\Simulation Parameters…” (Ctrl+E). По умолчанию выбирается решатель ode45 (Dormand-Prince), его следует сменить на ode23tb (stiff/TR-BDF2). Также в окне настройки параметров моделирования зададим максимальный расчетный шаг (max step size) – 5e-6, относительная точность расчета (relative tolerance) – 1e-3, абсолютная точность расчета (absolute tolerance) – 1e-5. Определим время окончания расчета (stop time), так как  сек, выберем время расчета - 0,16 сек.
сек, выберем время расчета - 0,16 сек.
Результаты моделирования всей системы приведены на рис. 4.16.

Рис. 4.16. Модель мостового выпрямителя с трансформатором и результаты моделирования.
Полученные на модели результаты сходятся с расчетными с высокой точностью: постоянное напряжение на нагрузке  = 50,16 В при расчетном = 50 В, действующее значение тока через конденсатор
= 50,16 В при расчетном = 50 В, действующее значение тока через конденсатор  = 1,204 А (при
= 1,204 А (при  =1,16 А), действующее значение тока вторичной обмотки
=1,16 А), действующее значение тока вторичной обмотки  = 1,568 А при расчетном
= 1,568 А при расчетном  = 1,56 А, значение импульса тока через вентиль
= 1,56 А, значение импульса тока через вентиль  = 3,139 А при расчетном
= 3,139 А при расчетном  = 3,125 А, действующее значение тока первичной обмотки
= 3,125 А, действующее значение тока первичной обмотки  = 0,3357 А при расчетном
= 0,3357 А при расчетном  = 0,333 А, = 0,02482 при расчетном =0,025. Коэффициент пульсаций напряжения на нагрузке составил
= 0,333 А, = 0,02482 при расчетном =0,025. Коэффициент пульсаций напряжения на нагрузке составил  =0,02723.
=0,02723.
Погрешность обычно связана с точностью графоаналитического метода определения коэффициентов  по данным рис. 2.5 - 2.9.
по данным рис. 2.5 - 2.9.
Очевидно, что расчетные данные, полученные по графическим зависимостям при  0 (т.е. когда учитывается индуктивность рассеяния трансформатора), в большей степени соответствуют результатам моделирования, чем полученные по аналитическим соотношениям для x = 0. Результаты моделирования показывают, что импульс тока вентилей заметно отличается по форме от косинусоидального (см. рис. 4.17) и имеет длительность, большую 2
0 (т.е. когда учитывается индуктивность рассеяния трансформатора), в большей степени соответствуют результатам моделирования, чем полученные по аналитическим соотношениям для x = 0. Результаты моделирования показывают, что импульс тока вентилей заметно отличается по форме от косинусоидального (см. рис. 4.17) и имеет длительность, большую 2  º (см. данные рис. 4.16).
º (см. данные рис. 4.16).
Вызовем окно блока “powergui”, для чего дважды щелкнем на нем ЛКМ, выберем раздел FFT Analysis. Выведем амплитудный спектр тока вторичной обмотки, настройки окна отражает рис. 4.17. Поскольку кривая тока симметрична относительно оси времени, то в ней отсутствуют постоянная составляющая и четные гармоники. Помимо основной (первой) гармонической, остальной вклад (в % от первой) вносят - 3-я (59,1%), 5-я (14,3%), 7-я (6,7%) и 9-я (3,7%) гармонические.

Рис. 4.17. Раздел FFT Analysis блока “powergui”: данные гармонического анализа кривой тока вторичной обмотки.
Построим внешнюю (нагрузочную) характеристику выпрямителя в пакете MATLAB. Поскольку при однократном моделировании параметры схемы должны быть неизменны, то следует создать m -файл в котором будет меняться некоторая переменная, в данном случае сопротивление нагрузки  , и происходить многократный автозапуск модели с сохранением результатов каждого моделирования. Так как многократное моделирование может отнимать значительное время, то для ускорения расчетов модель следует по возможности упростить и исключить из нее все ненужные измерительные схемы. Предварительно сохраним уже созданную модель под уникальным именем, а все изменения будем производить в новой модели.
, и происходить многократный автозапуск модели с сохранением результатов каждого моделирования. Так как многократное моделирование может отнимать значительное время, то для ускорения расчетов модель следует по возможности упростить и исключить из нее все ненужные измерительные схемы. Предварительно сохраним уже созданную модель под уникальным именем, а все изменения будем производить в новой модели.
В окне настройки блока “Series RLC Branch”, имитирующего нагрузку, зададим переменную – Rd (рис. 4.18). Помимо значения постоянной составляющей напряжения нагрузки  , будем сохранять в конце моделирования величины действующего значения тока вторичной обмотки
, будем сохранять в конце моделирования величины действующего значения тока вторичной обмотки  , коэффициента пульсаций и угла θ =
, коэффициента пульсаций и угла θ =  . Для сохранения результатов расчета в конце моделирования, измеряемые переменные должны быть переданы в блоки “To Workspace” (“Simulink\Sinks\”).
. Для сохранения результатов расчета в конце моделирования, измеряемые переменные должны быть переданы в блоки “To Workspace” (“Simulink\Sinks\”).

4.18. Вариант модели мостового выпрямителя для параметрического анализа.
В настройках каждого блока “To Workspace” следует задать (рис. 4.18):
- название переменной (Variable name) – устанавливается пользователем;
- число последних сохраняемых точек (Limit data points to last) – 1 (т.е. сохраняется последнее значение в конце расчета);
- время дискретизации (Sample time) – рекомендуется 5e-6;
- формат данных (Save format) – массив (Array).
В режимах близких к холостому ходу переходный процесс заряда конденсатора может значительно затянуться относительно заряда на номинальное сопротивление нагрузки, поэтому в окне настройки параметров моделирования введем варьируемую переменную tk, соответствующую времени окончания расчета (stop time, см. рис. 4.18). В дальнейшем для режима х.х. выберем время расчета tk = 1,6 сек, во всех остальных случаях tk = 0,32 сек.
В окне задания параметров блока мостового выпрямителя “Universal Bridge” введем сопротивление цепи снаббера  = 1e7, что также связано с особенностями моделирования режима х.х.
= 1e7, что также связано с особенностями моделирования режима х.х.
Создадим m -файл в котором опишем программу изменения сопротивления нагрузки с автоматическим сохранением данных моделирования. Листинг требуемой программы приведен на рис. 4.19.

4.19. Программа параметрического анализа выпрямительного устройства.
Для ускорения расчетов можно в окне модели перевести моделирование из режима Normal в режим Accelerator, файл модели при запуске компилируется и процесс расчета ускорится.
После запуска m -файла происходит многократное моделирование с сохранением данных. Спустя некоторое время программа завершает работу, массивы значений напряжения и тока сохраняются в файлы и выводится график, где найденные зависимости , , и θ отражаются в относительных единицах (от их максимума) в функции тока нагрузки (рис. 4.20). Это сделано с целью нормализации, поскольку каждый из параметров имеет свои абсолютные значения, порядок которых может отличаться. Максимальные значения , , и θ отражаются в командной строке MATLAB:  = 66,31 В,
= 66,31 В,  = 4,224 А,
= 4,224 А,  = 0,0939, θ
= 0,0939, θ  = 68,837º.
= 68,837º.
Отметим, что внешняя характеристика имеет ниспадающий вид. Уменьшение тока нагрузки приводит к уменьшению углов отсечки тока, снижению электромагнитных нагрузок, увеличению значения выпрямленного напряжения и сокращению его пульсаций (т.е. коэффициента пульсаций).

Рис. 4.20. Зависимости  ,
,  , и θ от тока нагрузки
, и θ от тока нагрузки  .
.
При моделировании в MATLAB первоначально задается сопротивление нагрузки  и в ходе моделирования определяется ток нагрузки . Данные моделирования, сохраненные в файлы, можно использовать для обработки в пакете MathCAD. Используя значения тока, полученные в MATLAB, можно по формулам (2.23), (2.24) и рис. 2.10 построить расчетную внешнюю характеристику и сравнить ее с данными моделирования. Задаваясь значениями тока в нескольких точках, определяем набор коэффициентов
и в ходе моделирования определяется ток нагрузки . Данные моделирования, сохраненные в файлы, можно использовать для обработки в пакете MathCAD. Используя значения тока, полученные в MATLAB, можно по формулам (2.23), (2.24) и рис. 2.10 построить расчетную внешнюю характеристику и сравнить ее с данными моделирования. Задаваясь значениями тока в нескольких точках, определяем набор коэффициентов  согласно формуле (2.24). Определив значения cos ψ
согласно формуле (2.24). Определив значения cos ψ  в зависимости от коэффициента
в зависимости от коэффициента  и угла φ = 19,3
и угла φ = 19,3  (см. данные примера 2 глава 2.2) по графику на риc. 2.10 и подставляя величину cos ψ в формулу (2.23) найдем для заданных значений .
(см. данные примера 2 глава 2.2) по графику на риc. 2.10 и подставляя величину cos ψ в формулу (2.23) найдем для заданных значений .
Программа вывода данных моделирования в пакет MathCAD, с построением расчетной внешней характеристики и по данным моделирования, представлена на рис. 4.21.

Рис. 4.21. Программа построения расчетной внешней характеристики и по данным моделирования в пакете MathCAD.
Нет необходимости рассчитывать все точки внешней характеристики полученной по данным моделирования, тем более при большом числе точек это было бы затруднительно. Достаточно построить 5-6 расчетных точек, поэтому в примере рис. 4.21 используется каждое 5-е значение тока нагрузки, полученное в MATLAB.
Точность графоаналитического метода построения внешней характеристики определяется погрешностью определения cos ψ по данным рис. 2.10 и обычно составляет 0,005 шкалы cos ψ (т.е. 0,5%), это и определяет погрешность в данных расчета и моделирования (рис. 4.21).
В качестве приложения. При проектировании выпрямителя расчет электромагнитных нагрузок, воздействующих на его элементы, производят по эмпирическим формулам, рассматривая работу устройства только в квазиустановившемся режиме, тогда как наиболее тяжелым режимом работы выпрямителя является включение в питающую сеть. Процесс включения выпрямителя в питающую сеть, при разряженном конденсаторе фильтра, как правило, сопровождается увеличением электромагнитных нагрузок и изменением режима работы схемы. Величины электромагнитных нагрузок в переходных режимах работы определяются параметрами схемы и начальной фазой включения выпрямителя в питающую сеть. Выбор параметров схемы выпрямителя без учета электромагнитных нагрузок в течение переходных процессов может привести к выходу из строя полупроводниковых приборов и элементов фильтра, а также к ухудшению массогабаритных, динамических, энергетических и надежностных показателей выпрямителя.
Используем возможности пакета MATLAB на примере данной модели для нахождения зависимости величин электромагнитных нагрузок от начальной фазы включения выпрямителя в питающую сеть. Предварительно сохраним уже созданную модель под уникальным именем, а все изменения будем производить в новой модели.
Найдем зависимости максимального значения тока через вентиль, его действующего и среднего значений за первую половину периода включения выпрямителя в питающую сеть, т.е. за интервал времени - 0,01 сек. Поэтому в окне настройки параметров моделирования зададим время расчета - 0,01 сек.
Для вывода сигнала тока вентиля в настройках блока “Universal Bridge” в разделе Measurements следует установить - Device currents (рис. 4.22, а) и добавить в модель блок “Multimeter” из библиотеки “SimPowerSystems\Measurements\”. В окне настройки блока “Multimeter” следует выбрать необходимый сигнал из раздела доступных измерений “Available Measurements” и добавить его в раздел выбранных измерений “Selected Measurements” (рис. 4.22, б). Так как блок “Multimeter” имеет один выход, то, в случае когда выбрано два и более сигналов, их следует разделить посредством элемента “Demux” (“Simulink\Signal Routing\”). Если в конце моделирования требуется вывести графики выбранных сигналов, то в окне настройки блока “Multimeter” следует активировать пункт Plot selected measurements (рис. 4.22, б).

а) б)
Рис. 4.22. Окна настройки блока “Universal Bridge” (а) и блока “Multimeter” (б).
Максимальное значение тока вентиля можно определить с помощью блока “Maximum” (“DSP Blockset\Statistics\”). Действующее значение тока вентиля определяется стандартным блоком “RMS” (“SimPowerSystems\Extra Library\Measurements\”). Так как измерение производится на половине периода, то в настройках блока “RMS” следует задать частоту 100 Гц.
Среднее значение тока вентиля определяется блоком “Mean” (“DSP Blockset\Statistics\”) или блоком “Fourier” (“SimPowerSystems\Extra Library\Measurements\”), в настройках последнего следует задать: основная частота (Fundamental frequency f1) – 100 Гц и номер гармонической в ряде Фурье - 0. Независимо от того какой блок используется “Mean” или “Fourier” - результат должен быть одинаковым (рис. 4.23).
Для требуемой работы блоков “Maximum” и “Mean” в их параметрах следует задать режим (mode) - running. В данном случае сигналов обнуления (сброса) не требуется, поэтому в настройках порта сброса “Reset port” блоков устанавливаем – none.
Для сохранения результатов расчета в конце моделирования, измеряемые переменные должны быть переданы в блоки “To Workspace” (“Simulink\Sinks\”). В настройках каждого блока следует задать:
- название переменной (Variable name) – устанавливается пользователем;
- число последних сохраняемых точек (Limit data points to last) – 1 (т.е. сохраняется последнее значение в конце расчета);
- время дискретизации (Sample time) - 5e-6;
- формат данных (Save format) – массив (Array);
Для ускорения расчетов следует исключить из модели все ненужные измерительные схемы (рис. 4.23). Можно также в окне модели перевести моделирование из режима Normal в режим Accelerator, файл модели при запуске компилируется и процесс расчета может значите