А.Д. Захарченко
В.Н. Подножкина
Теоретическая механика
Конспект лекций
Часть 1
Статика. Кинематика
Таганрог 2010
УДК 531. 01
Рецензенты:
кандидат технических наук, доцент Таганрогского филиала
ДГТУ Телеш А.Д.
кандидат технических наук, зав. кафедрой технологии машиностроения Таганрогского филиала ДГТУ
доцент Анкудимов Ю.П.
Захарченко А. Д., Подножкина В.Н. Теоретическая механика. Конспект лекций. Часть 1. Статика. Кинематика. – Таганрог: Изд-во ТТИ ЮФУ, 2010. – 112 с.
Конспект лекций предназначен для студентов технических специальностей машиностроительного профиля. Содержание конспекта включает в себя первые два раздела теоретической механики: статику и кинематику. Материал конспекта представлен теоретической частью дисциплины, в которой сформулированы основные понятия и определения, теоремы и законы, раскрывающие суть данной дисциплины в соответствии с рабочей программой и стандартом специальности.
Ил. 108. Библиогр.: 6 назв.
© ТТИ ЮФУ, 2010
© Захарченко А.Д.,2010
© Подножкина В.Н., 2010
Содержание
| ВВЕДЕНИЕ …………………………………………………………. Раздел 1. СТАТИКА ……………………………………………… Тема 1.1. Основные понятия и аксиомы статики ………………… Тема 1.2. Моменты силы относительно точки и оси …………….. Тема 1.3. Теория пар сил ………………………………………… Тема 1.4. Приведение произвольной системы сил ………………. Тема 1.5. Частные случаи пространственных систем сил ………… Тема 1.6. Плоская система сил ………………………………. …. Тема 1.7 Основные законы трения ………………………………. Тема 1.8. Центр параллельных сил. Центр тяжести тела ………… Раздел 2. КИНЕМАТИКА ………………………………... Тема 2.1. Кинематика точки ……………………………………. Тема 2.2. Простейшие движения твердого тела ………………… Тема 2.3. Плоское движение твердого тела …………………….. Тема 2.4. Общий случай движения свободного твердого тела …… Тема 2.5. Движение свободного твердого тела, имеющего одну неподвижную точку ………………………………………. Тема 2.6. Сложное движение точки ……………………………. Тема 2.7. Сложное движение твердого тела …………………….. ЗАКЛЮЧЕНИЕ …………………………………………………… КОНТРОЛЬНЫЕ ВОПРОСЫ……………………………….. БИБЛИОГРАФИЧЕСКИЙ СПИСОК ……………………………… |
ВВЕДЕНИЕ
Дальнейшее развитие материально-технической базы страны основывается на совершенствовании производства, повышении его эффективности, ускорении научно-технического процесса и внедрении научных разработок в производство. Выполнение этих задач невозможно без более совершенной и углубленной общетеоретической подготовки специалистов строительных, машиностроительных и других специальностей и, в частности, основательного изучения ими дисциплин механики.
Теоретическая механика есть научная основа важнейших разделов современной техники. Знание законов механики необходимо для понимания широкого класса явлений природы и формирования материалистического мировоззрения. Без усвоения методов механики не может быть современного образования, потому что в современной технической жизни механическая форма движения все еще остается доминирующей. При изучении курса рассматриваются три раздела теоретической механики.
Статика, задача которой является изучение вопросов замены данной системы сил другой, эквивалентной ей по механическому воздействию на твердое тело, а также установление необходимых и достаточных условий равновесия различных системы сил.
Кинематика, задача которой является исследование движения материальных тел в пространстве и во времени с геометрической точки зрения без рассмотрения причин, вызывающих это движение.
Динамика, задачей которой является изучение движения материальных тел в связи с действующими силами.
Знания, полученные студентами по теоретической механике, необходимы при изучении последующих, предусмотренных учебным планом, дисциплин: прикладная механика; основы теории надежности и диагностики; сопротивление материалов; механика жидкости и газа; гидро- и пневмопривод; эксплуатация автомобилей, детали машин и механизмов; термодинамика и рабочие процессы двигателей, а также разделов специальных дисциплин.
Основоположником механики как науки принято считать знаменитого ученого древности Архимеда (287 – 212 г.г. до н.э.). Он сформулировал точное решение задачи о равновесии сил, приложенных к рычагу, создал учение о центре тяжести тел, открыл закон о гидростатическом давлении жидкости на погруженное в неё тело.
С эпохи Возрождения начинается следующий этап развития механики. Гениальный итальянский художник, физик, механик и инженер Леонардо да Ви нчи (1451 – 1519 гг.) изучил движение падающего тела, движение тела по наклонной плоскости, изучил явление трения и ввел понятие момента силы.
Создание основ динамики как важнейшего раздела механики принадлежит итальянцу Галилео Галилею (1564 – 1642 гг.) и англичанину Исааку Ньютону (1643 – 1727 гг.). Ньютон в систематическом виде изложил основные законы классической механики.
Развитие механики в России связано с основателем Московского университета М.В.Ломоносовым (1711 – 1765 гг.) и знаменитым ученым Леонардо Эйлером (1707 – 1783 гг.)
Огромное значение для развития механики оказали работы отечественных ученых М.В.Остроградского (1801 – 1861 гг.), А.М.Ляпунова (1857 – 1918 гг.), И.В.Мещерского (1859 – 1935 г.г.), К.Э.Циолковского (1857 – 1935 гг.), Н.Е.Жуковского (1847 – 1921 гг.) и др.
В настоящее время теоретическая механика обеспечивает фундаментальные исследования по теории полета ракет, реактивных самолетов, искусственных спутников Земли, космических кораблей, создание и развитие робототехнических систем с искусственным интеллектом и др.
Основная задача изучения дисциплины – приобретение студентами знаний, умений и навыков, необходимых при решении практически любой технической задачи.
Часть понятий и определений теоретической механики в определенной мере знакомы студентам из предшествующих курсов, в частности, физики и математики. Остальные важнейшие понятия будут рассмотрены в соответствующих разделах.
Раздел 1. СТАТИКА ТВЕРДОГО ТЕЛА
В статике твердого тела рассматривается общее учение о силах и их свойствах; условиях преобразования и равновесия сил, приложенных к твердому телу. Под равновесием будем понимать состояние покоя тела по отношению к другим телам, например по отношению к Земле.
Тема 1.1. Основные понятия и аксиомы статики
1.1.1. Основные понятия и определения
Абсолютно твердое тело – тело, расстояние между любыми точками которого остается неизменным.
Материальная точка – материальное тело, размерами которого в рассматриваемых условиях можно пренебречь.
Кинематическое состояние тела – состояние покоя, или какого-либо движения тела.
Механическое взаимодействие тел – взаимодействие, способное изменить их кинематическое состояние.
Механическая система – любая совокупность материальных точек.
Сила – мера механического взаимодействия тел, определяющая интенсивность и направление этого взаимодействия.
Внешние силы – силы, действующие на материальные точки данной системы со стороны материальных точек, не принадлежащих этой системе.
Внутренние силы – силы взаимодействия между материальными точками рассматриваемой системы.
Системой сил называют совокупность сил, действующих на точки механической системы.
Системой сил, эквивалентной нулю (или равновесной системой сил), называют такую систему сил, действие которой на твердое тело или материальную точку не приводит в изменению их кинематического состояния.
Системы называют эквивалентными, если их действие по отдельности на одно и то же тело или материальную точку одинаково при прочих равных условиях. Условие эквивалентности двух систем сил  и
и  выражается в форме
выражается в форме
 , (1.1)
, (1.1)
где n и k – число сил в системах.
Равнодействующей силой рассматриваемой системы сил называют силу, действие которой на твердое тело или материальную точку эквивалентно действию этой системы сил. Равнодействующая сила обозначается  , и условие ее эквивалентности рассматриваемой системе сил выражается в виде
, и условие ее эквивалентности рассматриваемой системе сил выражается в виде
 . (1.2)
. (1.2)
Уравновешивающей силой заданной системы сил считается такая сила, добавление которой к заданной дает новую систему, эквивалентную нулю. Если  является уравновешивающей силой системы сил , то, согласно определению, она удовлетворяет условию
является уравновешивающей силой системы сил , то, согласно определению, она удовлетворяет условию
 . (1.3)
. (1.3)
Не всякая система сил имеет равнодействующую и уравновешивающую силы. Есть системы сил, которые не находятся в равновесии и не эквивалентны одной силе.
Связи – материальные объекты (тела, точки), которые ограничивают свободу перемещения рассматриваемого тела.
Реакция связи – сила или система сил, выражающая механическое действие связи на тело.
1.1.2. Аксиомы статики
Справедливости аксиом механики проверяется на опыте как непосредственно, так и по тем следствиям, которые из них получают.
1. Аксиома о равновесии системы двух сил. Для равновесия системы двух сил, приложенным к точкам твердого тела, необходимо и достаточно, чтобы эти силы были равны по величине и действовали вдоль одной прямой, проходящей через точки их приложения, в противоположных направлениях (рис. 1.1). Этой аксиомой устанавливается простейшая система сил, эквивалентная нулю. Если силы  и
и  находятся в равновесии, то, естественно, они образуют систему сил, эквивалентную нулю.
находятся в равновесии, то, естественно, они образуют систему сил, эквивалентную нулю.
Рис. 1.1 Рис. 1.2
2. Аксиома о добавлении (отбрасывании) системы сил, эквивалентной нулю. Если на твердое тело действует система сил, то к ней можно добавить (отбросить) систему сил, эквивалентную нулю. Полученная после добавления (отбрасывания) новая система сил является эквивалентной первоначальной системе сил.
Из этой аксиомы вытекает следствие: не изменяя кинематического состояния абсолютно твердого тела, силу можно переносить вдоль линии её действия, сохраняя её модуль и направление.
3. Аксиома параллелограмма сил. Две силы, действующие в одной точке твердого тела или на одну материальную точку, можно заменить одной равнодействующей силой, равной по величине и направлению диагонали параллелограмма, построенного на заданных силах (рис. 1.2). Очевидно, справедливо и обратное. Одну силу, приняв за равнодействующую, можно разложить по правилу параллелограмма на две составляющие силы.
Замену двух сил одной равнодействующей силой по правилу параллелограмма называют векторным сложением этих сил. Векторное сложение сил и математически выражают так:
 . (1.4)
. (1.4)
Если силы и направлены по одной прямой в одну или противоположные стороны, то векторное сложение переходит в алгебраическое сложение.
Модуль равнодействующей силы как величину векторной суммы сил вычисляют по формуле диагонали параллелограмма:
 . (1.5)
. (1.5)
4. Аксиома о равенстве сил действия и противодействия согласно основным законам классической механики, сформулированной Ньютоном, утверждает: всякой силе действия есть равная, но противоположная сила противодействия (рис. 1.3).
Рис. 1.3
5. Аксиома связей. Всякую связь можно отбросить и заменить силой – реакцией связи (в простейшем случае) или системой сил (в общем случае).
6. Аксиома затвердевания. Если деформируемое тело находится в равновесии, то при условном затвердевании тела равновесие его не нарушается (при рассмотрении равновесия цепи или троса).
Сформулированные аксиомы и являются той основой, на которой строится вся статика сил, приложенных к твердому телу.
1.1.3. Виды связей и их реакции
Твердое тело называется свободным, если оно может перемещаться в пространстве в любом направлении без ограничения. Тело, свобода движения которого ограничена связями, называется несвободным.
Многие теоремы теоретической механики формулируются для твердых тел, освобожденных от связей. Поэтому очень важно уметь правильно заменить отброшенные связи силами – реакциями связей.
Основные типы связей и реакций, соответствующих этим связям, показаны на рис. 1.4.
Гладкая опорная поверхность. Реакция  направлена по нормали к опорной поверхности (рис. 1.4, а,б).
направлена по нормали к опорной поверхности (рис. 1.4, а,б).
Опорная точка опирающейся гладкой поверхности. Реакция направлена по нормали к опирающейся поверхности (рис. 1.4, в).
Гибкая связь – цепь, нить, канат, трос. Реакция  приложена в точке прикрепления связи к телу и направлена от этой точки по оси внутрь ее (рис. 1.4, г).
приложена в точке прикрепления связи к телу и направлена от этой точки по оси внутрь ее (рис. 1.4, г).
Шарнирно-подвижная опора. Реакция  направлена перпендикулярно к плоскости, по которой могут перемещаться катки опоры (рис. 1.4, д).
направлена перпендикулярно к плоскости, по которой могут перемещаться катки опоры (рис. 1.4, д).
Неподвижный цилиндрический шарнир (рис. 14, е). Реакция раскладывается на составляющие  и
и  , направленные по осям координат, т. е.
, направленные по осям координат, т. е.  .
.
Жесткий стержень с двухшарнирным креплением, нагрузка на который действует только в шарнирах. Реакция  направлена по оси, соединяющей шарниры (рис. 1.4, ж).
направлена по оси, соединяющей шарниры (рис. 1.4, ж).
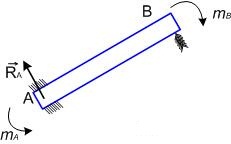
Неподвижная жесткая заделка балки с приложенными к ней заданными силами в плоскости (рис. 1.4, з). Реакция эквивалентна силе и паре сил с моментом  , причем силу раскладывают на составляющие и , направленные по осям координат, т. е. . (Понятие пары сил и ее момента будет дано в п. 1.3.)
, причем силу раскладывают на составляющие и , направленные по осям координат, т. е. . (Понятие пары сил и ее момента будет дано в п. 1.3.)
Скользящая заделка (рис. 1.4, и). При действии на тело плоской системы сил в заделке возникает пара сил с моментом и сила , направленная перпендикулярно к оси, вдоль которой возможно скольжение. Если скольжение возможно вдоль двух взаимно перпендикулярных направлений (в точке B), то в заделке возникает только пара сил с моментом  .
.
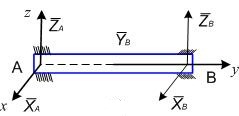
Неподвижный цилиндрический подшипник А (рис. 1.4, к). Реакция пересекает ось вращения тела и лежит в плоскости, перпендикулярной этой оси; раскладывается по направлениям осей x и z, т. е. .
Упорный подшипник В (рис. 1.4, к). Реакция  опорной плоскости направлена по оси подшипника у и раскладывается по направлениям осей x и z на составляющие
опорной плоскости направлена по оси подшипника у и раскладывается по направлениям осей x и z на составляющие  и
и  . Частным случаем упорного подшипника является подпятник – упорная плоскость горизонтальная (см. рис. 1.4, л).
. Частным случаем упорного подшипника является подпятник – упорная плоскость горизонтальная (см. рис. 1.4, л).





 а б в
а б в
 г д е
г д е
ж з и


 к л м
к л м
н
Рис.1.4
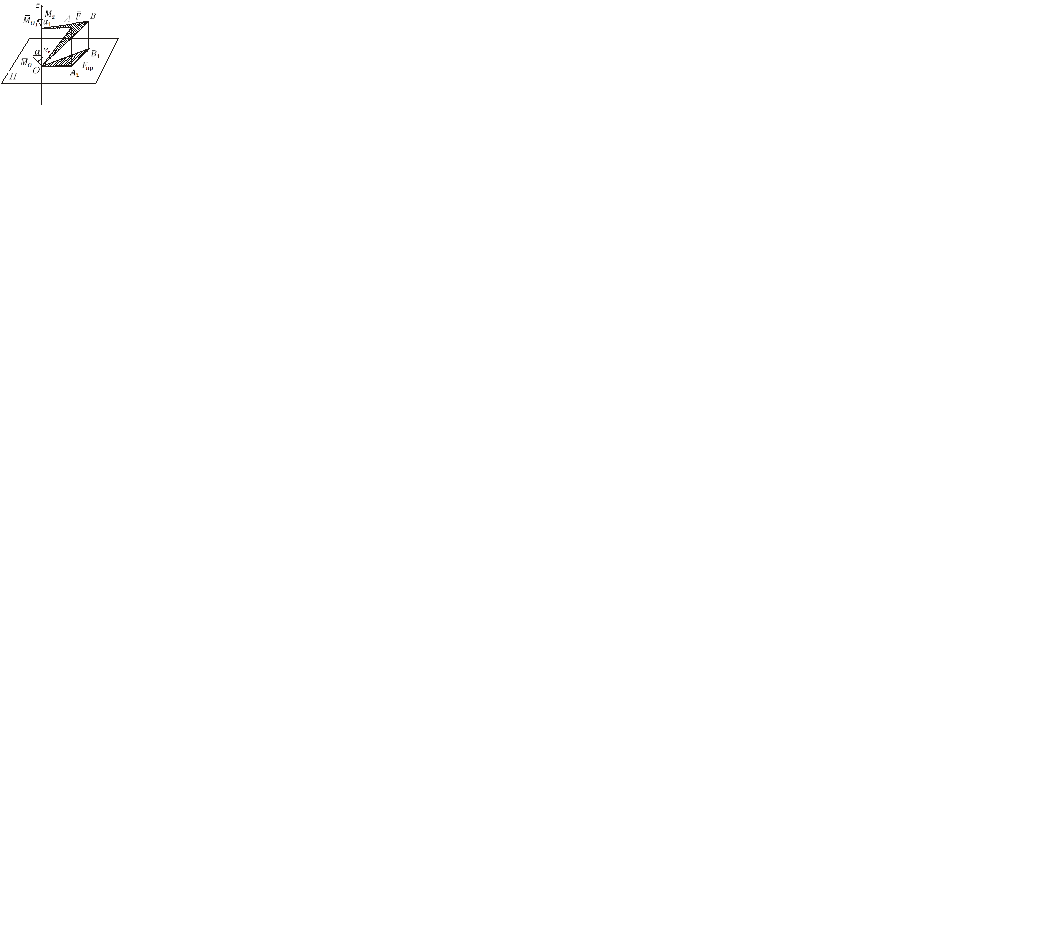
Петля В (рис. 1.4, м). Эта связь эквивалентна цилиндрическому подшипнику, ось которого совпадает с осью вращения тела у, следовательно, реакция лежит в плоскости, перпендикулярной оси вращения и раскладывается по направлениям осей x и z на составляющие и .
Сферический шарнир А (рис. 1.4, м). Реакция проходит через центр шарнира и раскладывается на три составляющие , ,  по направлениям выбранных осей координат, т. е.
по направлениям выбранных осей координат, т. е.
 .
.
Неподвижная жесткая пространственная заделка балки с приложенными к ней заданными силами в пространстве (рис. 1.4, н). Реакция эквивалентна силе (проходит через точку А и раскладывается на три составляющие , , по направлениям выбранных осей координат, т. е. ), и паре сил с моментом  , проекции которого на соответствующие оси координат
, проекции которого на соответствующие оси координат  ,
,  ,
,  (подробнее см. п. 1.6.5).
(подробнее см. п. 1.6.5).
Тема 1.2. Моменты силы относительно точки и оси
При исследовании условий равновесия плоской и пространственной систем сил очень важное значение имеют такие понятия как моменты силы относительно точки и моменты силы относительно оси.
1.2.1. Алгебраический момент силы относительно точки
Алгебраическим моментом силы относительно точки называют произведение модуля силы на плечо силы относительно этой точки (рис. 1.5), взятое со знаком плюс или минус.
Плечом h силы  относительно точки называют кратчайшее расстояние между этой точкой и линией действия силы. Обозначим
относительно точки называют кратчайшее расстояние между этой точкой и линией действия силы. Обозначим  или
или  алгебраический момент силы относительно точки О, тогда
алгебраический момент силы относительно точки О, тогда
 (1.6)
(1.6)
Если сила стремится вращать тело вокруг моментной точки (точки, относительно которой вычисляют алгебраический момент силы) против часовой стрелки, то берем знак плюс, если по часовой стрелке – знак минус.
Алгебраический момент силы представляет собой произведение силы на длину (в системе СИ –  ).
Алгебраический момент силы относительно точки равен нулю, если линия действия силы проходит через моментную точку. Численно алгебраический момент относительно точки равен удвоенной площад ).
Алгебраический момент силы относительно точки равен нулю, если линия действия силы проходит через моментную точку. Численно алгебраический момент относительно точки равен удвоенной площад
|  Рис. 1.5 Рис. 1.5
|
треугольника, построенного на силе и моментной точке:
 . (1.7)
. (1.7)
1.2.2. Векторный момент силы относительно точки
При рассмотрении пространственной системы сил, приложенных к твердому телу, применяется понятие векторного момента силы относительно точки.
| Рис. 1.6 |
 Векторным моментом силы относительно точки называют вектор, приложенный в этой точке и равный по модулю произведению силы на плечо относительно этой точки. Векторный момент силы направлен перпендикулярно плоскости, в которой лежат сила и моментная точка, таким образом, что с его конца можно видеть стремление силы вращать тело против движения часовой стрелки (рис. 1.6).
Векторным моментом силы относительно точки называют вектор, приложенный в этой точке и равный по модулю произведению силы на плечо относительно этой точки. Векторный момент силы направлен перпендикулярно плоскости, в которой лежат сила и моментная точка, таким образом, что с его конца можно видеть стремление силы вращать тело против движения часовой стрелки (рис. 1.6).
Условимся векторный момент силы относительно точки О обозначать , а его числовую величину  . Тогда, согласно определению,
. Тогда, согласно определению,
 . (1.8)
. (1.8)
Как и для алгебраического момента, векторный момент силы относительно точки равен удвоенной площади треугольника, построенного на силе и моментной точке:
 . (1.9)
. (1.9)
Справедлива формула
 , (1.10)
, (1.10)
где  – радиус-вектор, проведенный из моментной точки О в точку приложения силы или любую другую точку линии действия силы.
– радиус-вектор, проведенный из моментной точки О в точку приложения силы или любую другую точку линии действия силы.
1.2.3. Момент силы относительно оси

| Рис. 1.7 |
 . По определению
. По определению
 , (1.11)
, (1.11)
где  – вектор проекции силы на плоскость П, перпендикулярную оси Oz с плоскостью П.
– вектор проекции силы на плоскость П, перпендикулярную оси Oz с плоскостью П.
Момент силы относительно оси можно выразить через площадь треугольника построенного на проекции силы и точке пересечения O оси с плоскостью
 . (1.12)
. (1.12)
Из формулы (1.12) можно получить следующие важные свойства моменты силы относительно оси:
1. Момент силы относительно оси равен нулю, если сила пары параллельна оси.
2. Момент силы относительно оси равен нулю, если линия действия силы пересекает эту ось.
В обоих случаях оси и сила лежат в одной плоскости. Объединяя их, можно сказать, что момент силы относительно оси равен нулю, если силы и ось лежат в одной плоскости.
1.2.4. Связь момента силы относительно оси с векторным моментом силы относительно точки
Используя формулу (1.11), имеем (рис. 1.8):
 . (1.13)
. (1.13)
 Векторный момент силы относительно точки О, взятой на пересечении оси Oz с перпендикулярной плоскостью П, выражается в виде
Векторный момент силы относительно точки О, взятой на пересечении оси Oz с перпендикулярной плоскостью П, выражается в виде
 . (1.14)
. (1.14)
Векторный момент  направлен перпендикулярно плоскости треугольника OАВ. Аналогично для другой точки
направлен перпендикулярно плоскости треугольника OАВ. Аналогично для другой точки  по оси Oz: Рис. 1.8
по оси Oz: Рис. 1.8
 . (1.15)
. (1.15)
Причем векторный момент  направлен перпендикулярно плоскости треугольника
направлен перпендикулярно плоскости треугольника  . Треугольник
. Треугольник  является проекцией треугольников
является проекцией треугольников  и на плоскость П. Таким образом,
и на плоскость П. Таким образом,
 , (1.16)
, (1.16)
где  – угол между вектором и осью Oz.
– угол между вектором и осью Oz.
Из формул (1.2) и (1.3) следует, что
 . (1.17)
. (1.17)
Причем знак  полностью определяется знаком
полностью определяется знаком  .
.
Аналогично,
 , (1.18)
, (1.18)
т. е.
 (1.19)
(1.19)
где – любая точка на оси Oz.
Момент силы относительно оси равен проекции на эту ось векторного момента силы относительно любой точки оси.