Задание Д. 14. Применение принципа возможных перемещений
К решению задач о равновесии сил, приложенных
К механической системе с одной степенью свободы
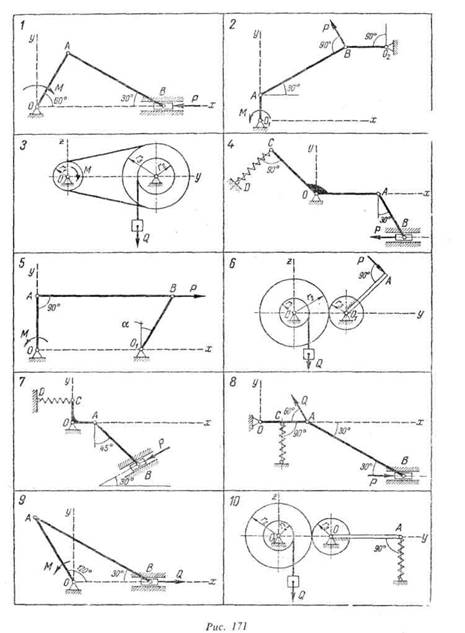
Схемымеханизмов, находящихся под действием взаимно уравновешивающихся сил, показаны на рис. 171 — 173, анеобходимые данные приведены в табл. 50.
Применяя принцип возможных перемещений и пренебрегая силами сопротивления, определить величину, указанную в предпоследней графе табл. 50.
Примечание, Механизмы в вариантах 3, 6, 10, 14, 46, 18, 19, 25 30 расположены в вертикальной плоскости, а остальные — в горизонтальной.
Таблица 50
| № вар | Линейные размеры | Силы | Момент па-ры сил М | Коэффициент жесткости с | Деформация пружины h | Величины подлежащие опр. | Примечание | |
| Q | P | |||||||
| OA=10см | - | - | - | - | P | |||
| O1A=20см | - | - | - | - | M | |||
| r1=20см r2=20см r3=40см | - | - | - | - | Q | |||
| OC:OA=4:5 | - | - | - | c | ||||
| OA=100 см | - | - | - | - | P | |||
| r1=15см r2=50см r3=20см O1A=80см | - | - | - | - | P | Вес рукоятки О1А не учитывать | ||
| OC=AC | - | - | - | P | Пружина сжата | |||
| OC=OA | - | - | Q | то же | ||||
| OA=20см | - | - | - | - | M | Вес рукоятки ОА не учитывать | ||
| r1=15см r2=40см r3=20см OA=100см | 2*103 | - | - | - | c | |||
| OA=20см | - | - | - | - | P | |||
| O1D=60см AO=20см | - | - | - | - | P | |||
| OA=40см | - | - | - | - | P | |||
| OB=2*OA | - | - | P | Вес стержней ОА и ОВ не учитывать; пружина растянута | ||||
| AC=OC=OD | 3*103 | - | - | P | Пружина сжата | |||
| d1=80см d2=25см | 5*103 | - | - | P | Вес стержней О1 А и О2 В не учитывать; | |||
| OA=20см | - | - | - | - | P | Пружина растянута | ||
| - | - | h | Р-вес блока радиусом r2 | |||||
| r1=20см r2=30см OA=25см | - | - | - | - | P | Вес звена АВ не учитывать | ||
| OA=AB=AC=50см | - | - | - | M | ||||
| OA=AB=AC=DC=25см | - | - | - | - | M | |||
| OA=40см | - | - | - | - | P | |||
| OC=2OA=100см | - | - | h | |||||
| AD=OD=OB | - | - | 2,5 | Q | Пружина сжата | |||
| OD=DB=0.8AO | - | - | P | Вес стержней ОА и ОВ не учитывать; пружина растянута | ||||
| OA=25см | - | - | C | Пружина растянута | ||||
| OB=AB | - | - | - | P | ||||
| OB=5/4OA | - | - | - | - | Q | |||
| AO=30,BD=O1D | - | - | - | h | ||||
| r1=15см r2=36см r3=10см r4=20см | - | - | - | Q |
 |  | ||

Задание Д. 16. Применение принципа Даламбера к определению реакций связей
Определить реакции внешних связей механической системы:
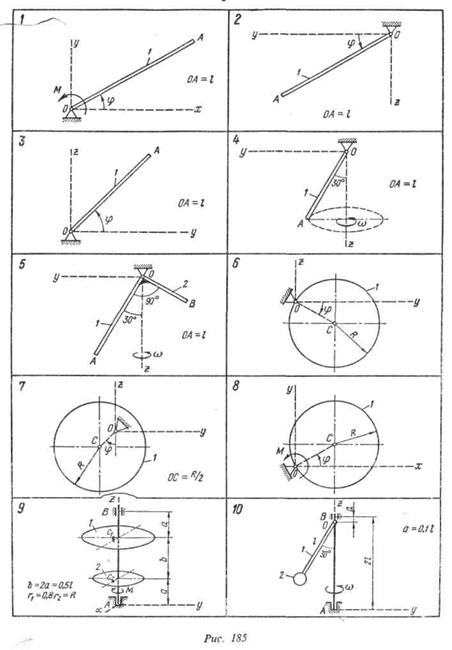
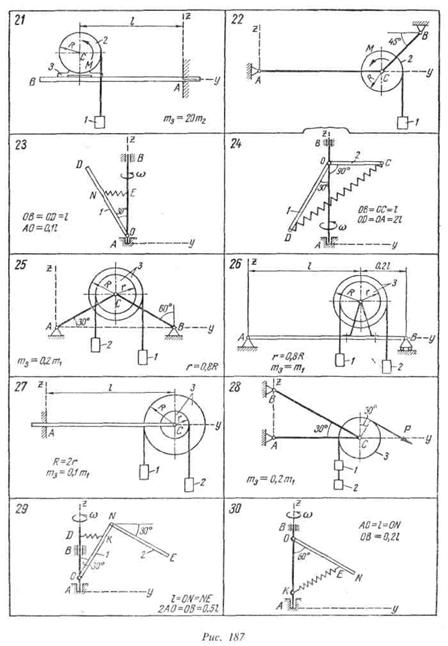
а) в произвольный момент времени — для вариантов 4, 5, 10, 12—18,
21-30 (рис. 185-187);
б) в момент времени t = t1 —для вариантов 1, 8, 9, 11, 20;
в) в тот момент времени, когда угол поворота φ = φ1,— для вариантов
2, 3, 6, 7;
г) в положении, показанном на чертеже для вариантов 15 и 19.
На схемах (рис. 185 — 187) плоскость хОу (хАу) горизонтальна, плоскость yOz (yAz) вертикальна. Необходимые для решения данные приведены в табл. 52, в которой ω — угловая скорость, φ0 и ω0 — значения угла поворота и угловой скорости в начальный момент времени.
Таблица 52
| № Вар | т1 | т2 | l | R | М, | ω, (const) рад/с | t1 | φ | φо | ω0 рад/с | Примечания |
| кг | м | Н м | c | гад | |||||||
| - | 0,60 | - | 1,0 | - | - | ||||||
| - | 0,50 | - | - | - | - | ||||||
| - | 0,80 | - | - | - | - | 6,3 | |||||
| - | 0,80 | - | - | - | - | - | - | - | |||
| 1,5 | 0,60 | - | - | - | - | - | - | - | |||
| - | - | 0,30 | - | - | - | ||||||
| - | - | 0,25 | - | - | - | 5,5 | |||||
| - | - | 0,30 | 4,0 | - | - | ||||||
| 0,50 | 0,10 | 20-0,1t | При t=t1 координаты центров тяжести шкивов C1 и С2; xC1=0; yC1=-0.1 см; zC1=a+b; xC2 =0,l см; | ||||||||
| 0,25 | - | - | - | - | - | - | - | yC2=0; zC2=a | |||
| 0,30 | 5-0.1t | При t = t1 ось стержня 1 параллельна оси у, а ось стержня 2 параллельна оси х; l1 = 25, l 2 = 40 см | |||||||||
| - | 0,40 | - | - | - | - | - | - | ||||
| 0,40 | - | - | - | - | - | - | |||||
| 0,40 | - | - | - | - | - | - | - | ||||
| 0,20 | - | - | - | - | - | - | |||||
| - | 0,10 | - | - | - | - | - | |||||
| 1,50 | - | - | - | - | - | Радиус инерции ротора 2 двигателя 3 iх = 0,10 м | |||||
| - | 0,40 | - | - | - | - | - | - | ||||
| - | 0,60 | - | - | - | - | - | - | ||||
| - | - | 0,30 | 3,0 | - | - | 2,0 | |||||
| 1,20 | 0,15 | Радиус инерции ротора 2 двигателя 3 ix = 0,12 м | |||||||||
| - | 0,20 | ||||||||||
| - | 0,60 | - | - | - | - | - | - | ||||
| 0,50 | - | - | - | - | - | - | - | ||||
| - | 0,20 | - | Радиус инерции шкива 3 ix = 0,18 м | ||||||||
| 1,50 | 0,25 | - | То же, ix.= 0,22 м | ||||||||
| 1,20 | 0,20 | - | ix = 0,15 м | ||||||||
| - | - | - | - | - | - | - | - | P=1300 Н | |||
| 0,42 | - | - | - | - | - | - | - | ||||
| - | 0,60 | - | - | - | - | - | - |
Примечания: 1. Вращающиеся тела, для которых не указан радиус инерции, рассматривать как тонкие однородные стержни (варианты 1-5, 11-15, 18, 19, 23, 24, 29, 30) или сплошные однородные диски (варианты 6 — 9, 16, 20, 22, 28); в варианте 10 тело 2 рассматривать как материальную точку.
2. На схемах 1, 8, 9, 11, 16, 17, 20—22 указаны внешние моменты М.
Пример выполнения задания. Дано: т1=3 кг, т2 = 2 кг, т3 = 5 кг; l 1= 0,30 м, l 2 = 0,20 м; α = 30°; ω = 120 рад/с = const. Схема системы и необходимые размеры приведены на рис. 188, а.
Найти реакции подпятника А, подшипника В, а также пружины DN. Поперечными размерами стержней 1, 2, 3 и массой пружины пренебречь.
Решение. Для определения реакций связей воспользуемся принципом Даламбера. Так как ω = const, рассмотрим только центробежные силы инерции частиц каждого стержня. Известно, что главный вектор сил инерции точек вращающегося тела определяется по формуле

где т — масса тела, а ас — ускорение центра масс тела.
Равнодействующая сил инерции точек тела равна их главному вектору. Поэтому для стержней 1 и 2


Для определения реакций опор необходимо знать точку приложения силы  (линия действия силы
(линия действия силы  совпадает с осью стержня 2 и поэтому определена). Так как сумма моментов параллельных сил инерции точек
совпадает с осью стержня 2 и поэтому определена). Так как сумма моментов параллельных сил инерции точек
 | |||
 | |||

стержня относительно точки О равна моменту равнодействующей этих сил, то
где h - плечо силы относительно точки О; dФ - сила инерции элемента стержня длиной dξ; ξ, — координата элемента стержня (рис. 188, 6). Используя значение силы и учитывая, что

где γ_ масса участка стержня единичной длины, получаем

откуда после интегрирования
 |
Показываем составляющие реакции подпятника  ,
,  ,
,  и подшипника
и подшипника  ,
,  , силы тяжести стержней
, силы тяжести стержней  ,
,  ,
,  и силы инерции и (рис. 188, в). Эти силы должны удовлетворять уравнениям, вытекающим из принципа Даламбера:
и силы инерции и (рис. 188, в). Эти силы должны удовлетворять уравнениям, вытекающим из принципа Даламбера:



Так как рассматриваемые силы расположены в плоскости yAz, то
Хв = ХА = 0.
Для определения реакции пружины DN составим уравнение  = 0, рассматривая силы, приложенные к стержню 1 (рис. 188, г):
= 0, рассматривая силы, приложенные к стержню 1 (рис. 188, г):

откуда Р = 6,47 кН.