Определить частоту и период малых свободных колебаний механической системы с одной степенью свободы, пренебрегая силами сопротивления и массами нитей.
Найти уравнение движения груза 1 y — y(t), приняв за начало отсчета положение покоя груза 1 (при статической деформации пружин). Найти также амплитуду колебаний груза 1.
Схемы систем показаны на рис. 226 — 228, а необходимые данные приведены в табл. 60.
Таблица 60
| № вар | l | ix | ix’ | r4 | m1 | m2 | m3 m4 m5 | m6 | c | Начальное условие | |
| м | кг | Н/см | y0, см |  м/с
м/с
| |||||||
| 0,5 | - | - | - | - | 0,1 | 5,0 | |||||
| 0,5 | - | - - | 0,2 | 3. | 6,0 | ||||||
| 0,5 | 3/2r | - | - | - | 0,2 | 7,0 | |||||
| 0,6 | - | - | - | 0,2 | |||||||
| 0,6 | - | - | 0,15 | - | 8,0 | ||||||
| 0,6 | - | - | 0,15 | - | 0,3 | 7,0 | |||||
| - | - | - | - | - | 0,4 | ||||||
| - | - | - | - | - | 6,0 | ||||||
| 0,6 | - | - | - | - | 0,5 | 5,0 | |||||
| 0,6 | - | - | - | - | 6,0 | ||||||
| - | - | - | - | - | 0,4 | 7,0 | |||||
| 0,5 | - | - | - | - | 0,2 | ||||||
| 0,3 | - | - | - | 8,0 | |||||||
| 0,4 | - | - | 0,1 | - | 7,0 | ||||||
| 0,4 | 
| - | - | - | 0,1 | ||||||
| - | - | - | - | - | 0,3 | 6,0 | |||||
| - | - | - | - | - | 5,0 | ||||||
| - | - | - | - | - | 6,0 | ||||||
| 0,2 | - | - | - | - | 0,1 | ||||||
| 0,5 | - | - | - | - | 0,4 | 7,0 | |||||
| - | 2r | - | - | - | 8,0 | ||||||
| - | - | 
| - | - | 0,1 | 7,0 | |||||
| 0,4 | - | - | 0,2 | 0,3 | |||||||
| - | - | 
| - | - | 6,0 | ||||||
| 0,3 | - | - | 0,1 | 0,2 | 5,0 | ||||||
| - |
| - | - | - | - | 0,3 | |||||
| - | - | 3r/2 | - | - | 6,0 | ||||||
| - | - |
| - | - | 0,2 | ||||||
| - | - | 4r/3 | - | - | 7,0 | ||||||
| - | - | 
| - | - | 0,3 | 7,0 |
В задании приняты следующие обозначения: 1 — груз массой т1, 2 — блок массой т2 и радиусом г2 (сплошной однородный диск); 3 — блок массой, т3 и радиусом инерции ix; 4 — сплошной однородный диск массой m4 и радиусом r4; 5 — диск массой; m 5 и радиусом инерции i'x; 6 — тонкий однородный стержень массой т6 и длиной I; 7 — стержень, масса которого не учитывается; с — коэффициент жесткости пружины; у0 — начальное отклонение груза / по вертикали от положения покоя, соответствующего статической деформации пружины; у0 — проекция начальной скорости  0 груза 1 на вертикальную ось.
0 груза 1 на вертикальную ось.
На рис. 226 — 228 системы тел 1 — 7 показаны в положении покоя (при статической деформации пружин).
В вариантах 5, 6, 14 и 23 стержень 6 жестко соединен с диском 4.
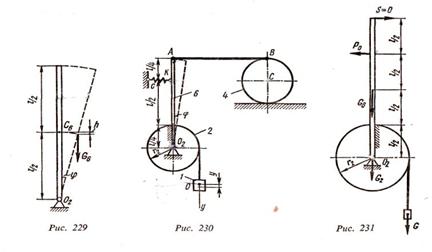
Пример выполнения задания. Дано: т1 = 1кг, т2=2 кг, т4= 1 кг, т6 = 3 кг; l = 0,6 м; с = 20 Н/см; у0 = 0,2 см; 0 = 8 см/с (рис. 229).
Определить циклическую частоту к и период Т малых свободных колебаний системы, а также получить уравнение у = у (t) колебаний груза 1и найти амплитуду а его колебаний.
Решение. Воспользуемся уравнением Лагранжа II рода для консервативной системы. Приняв за обобщенную координату системы вертикальное отклонение у груза 1от положения покоя, соответствующего статической деформации пружины, имеем
 |
где Т — кинетическая энергия системы; П — потенциальная энергия системы.
Кинетическую энергию T вычислим с точностью до величин второго порядка малости относительно и у, а потенциальную энергию П — с точностью до величин второго порядка малости относительно обобщенной координаты у.
Найдем кинетическую энергию системы, равную сумме кинетических энергий тел 1, 2, 6 и 4:
Выразим скорость центра масс тела 4 и угловые скорости тел 2, 4 и 6 через обобщенную скорость :
v1 = ; ω2= /r2; ω6 = ω2 = /r2
Так как рассматриваются малые колебания, то vB = vA, а ввиду того, что диск 4 катится без скольжения, vc = vB/2; следовательно,

 .
.
Момент инерции тела 4 относительно центральной оси

Моменты инерции тел 2 и 6 относительно оси вращения
J2 = m2r22/2; J6 = m6 l 2/3. Кинетическая энергия тел 1, 2, 4 и 6 имеет следующий вид:




Таким образом, кинетическая энергия рассматриваемой механической системы


Найдем потенциальную энергию системы, которая определится работой сил тяжести системы и силы упругости пружины на перемещении системы из отклоненного положения, когда груз имеет координату у, в нулевое положение, которым считаем положение покоя системы:
П = ПІ + ПІІ.
Потенциальная энергия, соответствующая силам тяжести при указан-" ном перемещении,
П1= - G1y - G6h,
где h — вертикальное смещение центра тяжести стержня 6, которое вычисляем с точностью до величины второго порядка малости относительно обобщенной координаты у. По рис. 230,
h = l/2- (1/2) cos φ = (l/2) (t - cos ф).
Ограничиваясь в формуле разложения
cos φ = 1 - φ2/2! + φ4/4!-…
двумя первыми членами и учитывая, что
φ = y/r2 = 4y/l
имеем

Таким образом,

Потенциальная энергия деформированной пружины при указанном перемещении системы равна

 где
где  - статическая деформация пружины; λК - перемещение точки прикрепления пружины К, соответствующее координате у. Так как (см. рис. 229)
- статическая деформация пружины; λК - перемещение точки прикрепления пружины К, соответствующее координате у. Так как (см. рис. 229)

т. е.  = Зу, то
= Зу, то

Потенциальная энергия системы

Так как в положении покоя, соответствующем статической деформации пружины,
 (a)
(a)
Уравнение (а) можно получить также, составив уравнение моментов сил  = 0 для положения покоя системы (рис. 231):
= 0 для положения покоя системы (рис. 231):

или
 т.е.
т.е. 
Таким образом, потенциальная энергия рассматриваемой механической системы

Найдем значения членов уравнения (1):



Уравнение (1) приобретает вид

или

Обозначив к2 коэффициент при у, имеем
 + к2у = 0. (2)
+ к2у = 0. (2)
Циклическая частота свободных колебаний

 1/с
1/с
Период свободных колебаний
Т = 2n/k = 2 • 3,14/27,1 = 0,23 с.
Интегрируя уравнение (2), получаем уравнение движения груза 1:
у = С1 cos kt + С2 sin kt..'
Для определения постоянных Ct и С2 найдем уравнение скорости груза
= - kC1 sin kt + кС2 cos kt
и воспользуемся начальными условиями задачи. Из уравнений у = у (t) и у — y(t) при t = 0 имеем:
y0 = C1; = k С2.
Следовательно,
C1=y0 С2 = / k
Подставляем эти значения Сх и С2 в уравнение y = y(t):
у = y0 cos kt + ( /к) sin kt;
у = 0,2 cos 27,1 t + 0,3 sin 27,l t.
Уравнение у = у (t) можно получить в другом виде, если перейти к другим постоянным интегрирования αиβ, приняв
C1=α sinβ; C2 = αcosβ
Тогда у = a sin (kt + β), где а =  , β= arctg (C1/C2) или
, β= arctg (C1/C2) или
а =  β = arctg (куо/ )
β = arctg (куо/ )
Найдем числовые значения а и β: а = 3,6 • 10 -2 м, β = arctg 0,68.
Так как sin β > 0 (С1> 0), то β = 34° 12' = 0,597 рад.
Окончательно
у = 3,6 • 10- 2 sin (27,1t + 0,595) м.