Для определения минимального радиуса кулачка с плоским толкателем необходимо построить график изменения приведенного ускорения толкателя в зависимости от его перемещения.
Приведенной скоростью  i, м, называется отношение линейной скорости центра ролика (толкателя или колебателя) к угловой скорости кулачка
i, м, называется отношение линейной скорости центра ролика (толкателя или колебателя) к угловой скорости кулачка
 ,
,

где
 - линейная скорость толкателя или центра ролика колебателя, соответствующая его положению;
- линейная скорость толкателя или центра ролика колебателя, соответствующая его положению;
 - угловая скорость кулачка.
- угловая скорость кулачка.
Приведенным ускорением  , мм, толкателя называется отношение линейного ускорения толкателя к квадрату угловой скорости кулачка
, мм, толкателя называется отношение линейного ускорения толкателя к квадрату угловой скорости кулачка
 ,
,
где
 - линейное ускорение толкателя, соответствующее его положению.
- линейное ускорение толкателя, соответствующее его положению.
При построении графиков приведенной скорости  или приведенного ускорения
или приведенного ускорения  , значение перемещения толкателя (колебателя) и соответствующие им значения откладываются на графике в одном стандартном масштабе
, значение перемещения толкателя (колебателя) и соответствующие им значения откладываются на графике в одном стандартном масштабе  или
или  . По оси ординат графика откладываются в принятом масштабе перемещения, а по оси абсцисс в этом же масштабе - отрезки приведенных скоростей или ускорений, соответствующие данным перемещениям. Соединив на графике концы приведенных скоростей или ускорений плавной кривой получим график
. По оси ординат графика откладываются в принятом масштабе перемещения, а по оси абсцисс в этом же масштабе - отрезки приведенных скоростей или ускорений, соответствующие данным перемещениям. Соединив на графике концы приведенных скоростей или ускорений плавной кривой получим график  или
или  .
.
Рекомендуемые масштабные коэффициенты  или для построения графиков: 0,001 (1:1), 0,002 (1:2), 0,0025 (1:2,5), 0,0005 (2:1), 0,0004 (2,5:1), 0,00025 (4:1), 0,0002 (5:1).
или для построения графиков: 0,001 (1:1), 0,002 (1:2), 0,0025 (1:2,5), 0,0005 (2:1), 0,0004 (2,5:1), 0,00025 (4:1), 0,0002 (5:1).
Значения перемещения толкателя или колебателя и соответствующие им значения приведенных скоростей или ускорений в принятом масштабе или могут быть определены для каждого положения или аналитически или графически.
Перемещение в масштабе  или
или  для каждого положения будет следующим:
для каждого положения будет следующим:
- для толкателя перемещение  , мм, вычисляют по формуле
, мм, вычисляют по формуле
 ,
,
- для колебателя перемещение , мм, вычисляют по формуле
 ,
,
где
 ,
,  - текущее значение ординат на графиках s-t или Ψ-t, мм;
- текущее значение ординат на графиках s-t или Ψ-t, мм;
 ,
,  - масштабные коэффициенты графиков s-t или Ψ-t;
- масштабные коэффициенты графиков s-t или Ψ-t;
 или
или  - принятый стандартный масштабный коэффициент графика или ;
- принятый стандартный масштабный коэффициент графика или ;
L -длина колебателя, м.
Отрезки приведенных скоростей или ускорений в принятом масштабе  или Кl для каждого положения могут быть определены по формулам:
или Кl для каждого положения могут быть определены по формулам:
для толкателя
 ,
,  ,
,
для колебателя
 ,
,
где
yvi, yai, yωi - текущие значения ординат на графиках v-t или v-s,; W-tилиW-Ψ; a-t или a-s, мм;
 ,
,  ,
,  - масштабные коэффициенты графиков v-t или v-s; ω-t или W-Ψ; a-t или a-s соответственно;
- масштабные коэффициенты графиков v-t или v-s; ω-t или W-Ψ; a-t или a-s соответственно;
 - угловая скорость кулачка;
- угловая скорость кулачка;
L - длина колебателя, м;
 или
или  - принятый стандартный коэффициент графика ли .
- принятый стандартный коэффициент графика ли .
Графическое определение значений перемещений приведенных скоростей или ускорений рассмотрено ниже в примерах 1, 2, 3, 4.
По построенному графику приведенной скорости или ускорения в функции
от перемещения толкателя (колебателя) определяют минимальный радиус кулачка. Определение минимальных радиусов кулачков с различными типами толкателя.
Построение профиля кулачка
После определения минимального радиуса кулачка строится профиль кулачка. Построение профиля с различными типами рассмотрим на примерах.
Пример 1
Выполнить кинематический анализ и динамический синтез центрального кулачкового механизма с роликовым толкателем по следующим данным: закон движения толкателя задан графиком a-t (рисунок 5), перемещение толкателя h =35 мм, рабочий угол кулачка  =180, максимальный допустимый угол давления равен
=180, максимальный допустимый угол давления равен  = 300. Частота вращения кулачка nk =120 мин-1.
= 300. Частота вращения кулачка nk =120 мин-1.
Решение
1 Построение кинематических графиков. Построение всех графиков изображено на рисунке 5 и выполнено методами, описанными в варианте 2 настоящего руководства.
2 Определение масштабных коэффициентов графиков.
а) Масштабный коэффициент перемещения  , м/мм, вычисляют по формуле
, м/мм, вычисляют по формуле
 ,
,
где
h - заданное перемещение толкателя, h =0,035;
 - максимальная ордината на графике s-t, =40 мм.
- максимальная ордината на графике s-t, =40 мм.
б) Масштабный коэффициент времени  , с/мм, вычисляют по формуле
, с/мм, вычисляют по формуле
 ,
,
где
 - заданный рабочий угол кулачка,
- заданный рабочий угол кулачка,  =1800;
=1800;
nk - заданная частота вращения кулачка, nk =120 мин-1;
Xt - длина отрезка на оси абсцисс графика s-t (рисунок 5), изображающая время вращения кулачка на рабочий угол, Xt =86 мм.
в) Масштабный коэффициент скорости  , с/мм, вычисляют по формуле
, с/мм, вычисляют по формуле
 ,
,
где
 - полюсное расстояние в мм на графике V (рисунок 5),
- полюсное расстояние в мм на графике V (рисунок 5),  =17 мм.
=17 мм.
г) Масштабный коэффициент ускорения  , м/с2·мм, вычисляют по формуле
, м/с2·мм, вычисляют по формуле
 .
.
Принимаем стандартный масштабный коэффициент = 0,001 м/мм. По оси ординат графика  в масштабе откладываем величину перемещения толкателя
в масштабе откладываем величину перемещения толкателя  , мм, следующим образом (рисунок 6, а):
, мм, следующим образом (рисунок 6, а):
 .
.
а)

б)
а – диаграмма приведенных скоростей; б – проектирование профиля кулачка.
Рисунок 6 – Синтез центрального кулачкового механизма с роликовым толкателем.
Разделим величину перемещения толкателя  на искомом графике
на искомом графике  на столько равных частей, на сколько разделена ось абсцисс (ось S) графика v-s (рисунок 5). Если ось S графика v-s или s-t окажется при построении разделенной на неравные части, то и ординату графика следует разделить в пропорциональном отношении, т.е. найти отрезки в масштабе
на столько равных частей, на сколько разделена ось абсцисс (ось S) графика v-s (рисунок 5). Если ось S графика v-s или s-t окажется при построении разделенной на неравные части, то и ординату графика следует разделить в пропорциональном отношении, т.е. найти отрезки в масштабе  , изображающие перемещение толкателя в каждом положении или аналитически
, изображающие перемещение толкателя в каждом положении или аналитически
(точки: 0, 1, 2, 3, 4 на графике (рисунок 6, a) или графически (рисунок 5) – график v-s.

Определяем угловую скорость кулачка  , 1/с
, 1/с
 .
.
Определяем в каждом положении толкателя в масштабе  отрезки приведенной скорости
отрезки приведенной скорости
 ;
;  ;
;  ,
,
где


 - ординаты скорости толкателя на графике v-sили v-t(рисунок 5), мм;
- ординаты скорости толкателя на графике v-sили v-t(рисунок 5), мм;
 - масштабный коэффициент графика v-sили v-t.
- масштабный коэффициент графика v-sили v-t.
Отрезки приведенной скорости толкателя можно определить также графически, для чего находим максимальное значение приведенной скорости
 ,
,
где
 - максимальная ордината скорости на графике v-s или v-t.
- максимальная ордината скорости на графике v-s или v-t.
Для остальных положений отрезки приведенной скорости определяются графически, как показано на рисунке 5 (график v-s).
Через начало координат графика v-s под произвольным углом к оси V графика проводим прямую АВ и на этой прямой от начала координат, т.е. от точки О, отложим отрезок максимальной приведенной скорости Оа=  =29. Затем на ось V графика v-sпереносим ординату максимальной скорости =0-
=29. Затем на ось V графика v-sпереносим ординату максимальной скорости =0-  и ординаты скоростей в конце каждого участка
и ординаты скоростей в конце каждого участка  = 0,
= 0,  = 0-1,
= 0-1,  =
=  = 0-2,
= 0-2,  =0-3..,
=0-3..,  = 0.
= 0.
Соединим конец ординаты максимальной скорости с концом ординаты на максимальной приведенной скорости  на линии АВ, т.е. точку
на линии АВ, т.е. точку  соединим с точкой а. Параллельно отрезку а-
соединим с точкой а. Параллельно отрезку а-  проводим прямые через точки
проводим прямые через точки  , ,
, ,  и т.д., которые на прямой АВ отсекут отрезки приведенных скоростей толкателя 0-0, 0-1, 0-2, 0-3, 0-4, 0-5, 0-6, 0-7, 0-8 в принятом масштабе в положениях 0, 1, 2, 3,...8. Теперь отрезки 0-0, 0-1, 0-2,...0-8 из графика v-s переносим на график и откладываем от оси S’ по обе стороны в точках 0,1,2,3,...8 соответственно. Концы этих отрезков (точки: 0, 1’, 2’, 3’,...8’) (рисунок 6) соединяем плавной кривой и получаем график
и т.д., которые на прямой АВ отсекут отрезки приведенных скоростей толкателя 0-0, 0-1, 0-2, 0-3, 0-4, 0-5, 0-6, 0-7, 0-8 в принятом масштабе в положениях 0, 1, 2, 3,...8. Теперь отрезки 0-0, 0-1, 0-2,...0-8 из графика v-s переносим на график и откладываем от оси S’ по обе стороны в точках 0,1,2,3,...8 соответственно. Концы этих отрезков (точки: 0, 1’, 2’, 3’,...8’) (рисунок 6) соединяем плавной кривой и получаем график  . Проводим под заданным углом давления α =300 к обеим ветвям полученного графика касательные и находим минимальный радиус центрового профиля кулачка
. Проводим под заданным углом давления α =300 к обеим ветвям полученного графика касательные и находим минимальный радиус центрового профиля кулачка  . Отрезок О10 и будет представлять собой в масштабе минимальный радиус . Определяем истинную величину минимального радиуса
. Отрезок О10 и будет представлять собой в масштабе минимальный радиус . Определяем истинную величину минимального радиуса
= О10· =36·0,001=0,036м=36мм.
Теперь радиусом в масштабе строим окружность минимального радиуса центрального профиля кулачка (рисунок 6) и от точки О в обращенном движении откладываем рабочий угол =180, дугу которого делим на столько частей (в примере 1 на восемь), на сколько разделена ось t графика s-t (рисунок 5).
Из центра окружности О1 (рисунок 6) через точки деления 1, 2, 3,..., 8, проводим радиус-векторы, на которых откладываем от окружности минимального радиуса значения перемещения толкателя, найденные в масштабе . Соединив концы этих отрезков плавной кривой, получим центровой профиль кулачка (см. рисунок 6).
Выбираем радиус ролика r = (0,2…0,4) = 0,35  36 = 12,5 мм. Методом обкатки центрового профиля радиусом r строим действительный профиль кулачка и изображаем тип толкателя.
36 = 12,5 мм. Методом обкатки центрового профиля радиусом r строим действительный профиль кулачка и изображаем тип толкателя.
Пример 2
По исходным данным (пример 1) произвести анализ и синтез дезаксиального кулачкового механизма с роликовым толкателем. Если величина дезаксиала е =10 мм.
Решение.
1 Построение графиков описано в варианте 2 и изображено на рисунке 5. Определение масштабных коэффициентов графиков дано в решении примера 1. Рассмотрим особенности определения минимального радиуса и построения профиля кулачка. Построение графика  описано в решении примера 1.
описано в решении примера 1.
2 Определение минимального радиуса кулачка.
Определяем в масштабе  величину дезаксиала Х е, мм, следующим образом:
величину дезаксиала Х е, мм, следующим образом:
 .
.
От оси os’ графика  (рисунок 6, a) откладываем в масштабе
(рисунок 6, a) откладываем в масштабе  величину дезаксиала е = 10 мм в противоположную сторону выбранному направлению угловой скорости кулачка и через конец отрезка е проводим вертикальную линию. Расстояние от точки пересечения вертикали с касательной к графику до начала координат графика (
величину дезаксиала е = 10 мм в противоположную сторону выбранному направлению угловой скорости кулачка и через конец отрезка е проводим вертикальную линию. Расстояние от точки пересечения вертикали с касательной к графику до начала координат графика ( 0) и будет минимальным радиусом кулачка в выбранном масштабе
0) и будет минимальным радиусом кулачка в выбранном масштабе  , т.е. R0'=O1'0·Ks'.
, т.е. R0'=O1'0·Ks'.
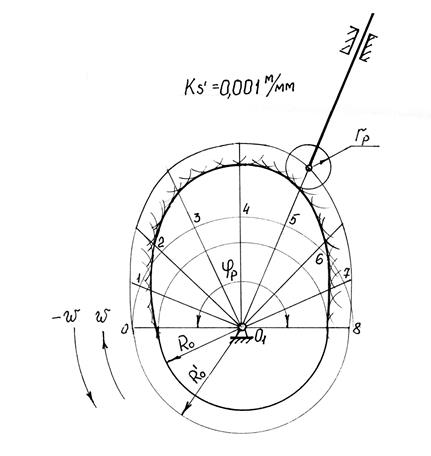
3 Построение профиля кулачка.
Из точки  ' (рисунок 7) в масштабе
' (рисунок 7) в масштабе  проводим две окружности: окружность минимального радиуса
проводим две окружности: окружность минимального радиуса  и окружность дезаксиала радиусом е.
и окружность дезаксиала радиусом е.

Рисунок 7 - Проектирование дезаксиального кулачкового механизма с роликовым толкателем.
На дуге окружности минимального радиуса от точки О в обращенном движении откладываем рабочий угол φp и делим его на столько равных частей, на сколько разделена ось t графика s-t (рисунок 5). Через точки деления 0, 1, 2, 3..., 8 проводим навстречу выбранному направлению угловой скорости кулачка касательные к окружности дезаксиала. На касательных в каждом положении от окружности минимального радиуса откладываем в масштабе перемещения толкателя  ,
,  ,
,  , ,
, , 
 ,
,  ,
,  и т.д. Соединив концы этих отрезков плавной кривой, получаем центровой профиль кулачка. Выбираем радиус ролика r = (0,2-0,4)
и т.д. Соединив концы этих отрезков плавной кривой, получаем центровой профиль кулачка. Выбираем радиус ролика r = (0,2-0,4)  и обкаткой во внутрь центрового профиля получаем действительный профиль кулачка. Изображаем тип толкателя (см. рисунок 7).
и обкаткой во внутрь центрового профиля получаем действительный профиль кулачка. Изображаем тип толкателя (см. рисунок 7).
Пример 3
По исходным данным (пример 1) произвести анализ и синтез кулачкового механизма с плоским толкателем.
Решение.
1 Построение графиков описано в варианте 2 и изображено на рисунке 5. Определение масштабных коэффициентов графиков рассмотрено в решении примера 1.
2 Определение минимального радиуса кулачка.
Выбираем масштабный коэффициент графика приведенного ускорения в функции перемещения  ’. По оси ординат искомого графика откладываем в масштабе величину перемещения толкателя
’. По оси ординат искомого графика откладываем в масштабе величину перемещения толкателя  =35 мм и делим его на столько частей, на сколько разделена ось s графика o-s на рисунке 5 графически или аналитически.
=35 мм и делим его на столько частей, на сколько разделена ось s графика o-s на рисунке 5 графически или аналитически.
 .
.
Определяем в масштабе отрезки приведенных ускорений в каждом положении толкателя или аналитически
 ,
,
или графически
 .
.
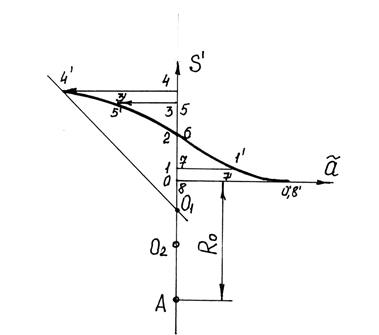
Графическое определение приведенных ускорений в масштабе показано на рисунке 8, а, где изображен отдельно график a-sиз рисунка 5. Теперь от оси s’ в каждом положении толкателя откладываем отрезки приведенных ускорений  и т.д. и, соединив их концы кривой, получим график a-s’ (рисунок 8, а). К отрицательной части графика под углом
и т.д. и, соединив их концы кривой, получим график a-s’ (рисунок 8, а). К отрицательной части графика под углом
а)
б)
а – диаграмма приведенных ускорений; б – проектирование кулачкового механизма.
Рисунок 8 – Синтез кулачкового механизма с плоским толкателем.
450 проводим касательную до пересечения ее с осью o-s’ в точкеО1. Увеличим отрезок ОО1 на величину 10 мм в масштабе  получим точкуО2.
получим точкуО2.
Расстояние O2О будет представлять в масштабе  величину минимального радиуса кулачка, т.е.
величину минимального радиуса кулачка, т.е.  = O2О
= O2О  . Конструктивный радиус кулачка принимаем равным АО, т.е. =АО , что допускается.
. Конструктивный радиус кулачка принимаем равным АО, т.е. =АО , что допускается.
Примечание - Если касательная к графику пересечет ось выше начала координат графика  ’, то величину минимального радиуса кулачка принимают не менее величины перемещения толкателя, т.е.
’, то величину минимального радиуса кулачка принимают не менее величины перемещения толкателя, т.е. 
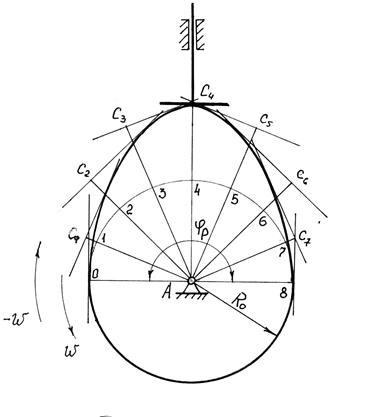
 h. На окружности минимального радиуса в обращенном движении (рисунок 8, б) откладываем рабочий угол
h. На окружности минимального радиуса в обращенном движении (рисунок 8, б) откладываем рабочий угол  и делим его на равные части, как и ось t графика s-t(рисунок 5). Через точки 0, 1, 2.., 8 из центра O1 проводим лучи, на которых от окружности радиуса
и делим его на равные части, как и ось t графика s-t(рисунок 5). Через точки 0, 1, 2.., 8 из центра O1 проводим лучи, на которых от окружности радиуса  откладываем перемещения
откладываем перемещения  ,
,  ,
,  и т.д., соответствующие данным положения толкателя (определены графически, рисунок 5) получим точки C0, С1, C2,…, C8. Через эти точки проводим перпендикуляры в лучам, т.е. положение тарелки толкателя в обращенном движении. Действительным профилем будет огибающая всех положений тарелки, т.е. необходимо построить плавную кривую, касающуюся перпендикуляров в каждом положении.
и т.д., соответствующие данным положения толкателя (определены графически, рисунок 5) получим точки C0, С1, C2,…, C8. Через эти точки проводим перпендикуляры в лучам, т.е. положение тарелки толкателя в обращенном движении. Действительным профилем будет огибающая всех положений тарелки, т.е. необходимо построить плавную кривую, касающуюся перпендикуляров в каждом положении.
Пример 4
Произвести анализ и синтез кулачкового механизма с роликовым колебателем.
- Закон движения толкателя задан графиком ψ-t (рисунок 4).
- Угол размаха колебателя  =200.
=200.
- Длина колебателя L =75 мм.
- Рабочий угол кулачка  =2400.
=2400.
- Частота вращения кулачка nк =125 мин-1.
- Угол давления α =400.
Решение.
1 Построение графиков приведено в варианте 1.
2 Определение масштабных коэффициентов.
а) Масштабный коэффициент углового перемещения колебателя  , 1/мм, будет равен
, 1/мм, будет равен
 ,
,
где
уψ - ордината на графике  -t, уψ =30 мм.
-t, уψ =30 мм.
б) Масштабный коэффициент времени  , c/мм, будет равен
, c/мм, будет равен
 ,
,
где
- длина абсциссы, соответствующая времени поворота кулачка на рабочий угол, =60 мм.
в) Масштабный коэффициент угловой скорости колебателя  , 1/c×мм, будет равен
, 1/c×мм, будет равен
 ,
,
где
 - полюсное расстояние на графике
- полюсное расстояние на графике  ,
,  = 15 мм.
= 15 мм.
г) Масштабный коэффициент углового ускорения колебателя  , 1/c2×мм, будет
, 1/c2×мм, будет
 .
.
3 Построение графика  и определение минимального радиуса.
и определение минимального радиуса.
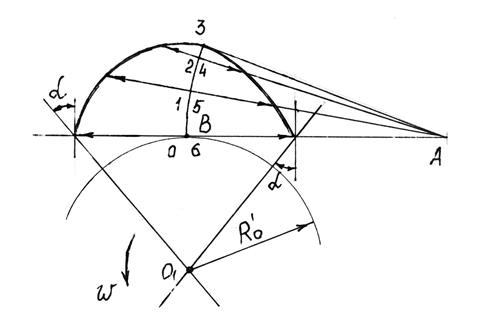
Принимаем масштабный коэффициент построения Кl =0,001 м/мм. Откладываем из точки А (рисунок 9, а) длину колебателя АВ в масштабе Кl и строим угол размаха колебателя β. Определяем линейное перемещение конца колебателя (длину дуги,  , мм) в этом же масштабе
, мм) в этом же масштабе
 .
.
Разбиваем ось t графика  на равные части и графическим построением на графике
на равные части и графическим построением на графике  (см. рисунок 4) определяем линейные перемещения конца колебателя соответствующие положением 0, 1, 2, 3..., 6. Перемещение конца колебателя 0-1, 1-2, 2-3 и т.д. переносим на дугу центрального угла β размаха колебателя, и через эти точки деления из центра А проводим лучи А-0, А-1, А-2,... и т.д. (рисунок 9, а).
(см. рисунок 4) определяем линейные перемещения конца колебателя соответствующие положением 0, 1, 2, 3..., 6. Перемещение конца колебателя 0-1, 1-2, 2-3 и т.д. переносим на дугу центрального угла β размаха колебателя, и через эти точки деления из центра А проводим лучи А-0, А-1, А-2,... и т.д. (рисунок 9, а).
Определяем приведенные скорости конца колебателя, соответствующие перемещениям колебателя в положениях 0, 1, 2, 3…, 6 аналитически

или графическим построением, как показано на графике  (рисунок 4), для этого найдем в масштабе Кl максимальную приведенную скорость конца колебателя
(рисунок 4), для этого найдем в масштабе Кl максимальную приведенную скорость конца колебателя
 ,
,
где
ωк - угловая скорость кулачка
 .
.
На лучах А-1, А-2 и т.д. графика  (рисунок 9, а) откладываем от дуги приведенные скорости
(рисунок 9, а) откладываем от дуги приведенные скорости  и т.д., и соединив концы их плавной кривой, получим график
и т.д., и соединив концы их плавной кривой, получим график  .
.
На концах приведенных скоростей во всех положениях колебателя строим угол давления α =400 (см. рисунок 9, а) и определяем в масштабе Кl минимальный радиус  кулачка
кулачка  =О1 0·Кl=O10·Kl.
=О1 0·Кl=O10·Kl.
При построении графика на участке, где вращение колебателя совпадает с вращением кулачка, положительные значения приведенных скоростей откладываются по колебателю к центру его вращения, а при разных направлениях угловых скоростей кулачка и колебателя на продолжении колебателя.
4 Построение профиля кулачка.
В масштабе Кe из центра О1 строим две окружности: минимального радиуса  и радиусом О1А (расстояние между осями вращения кулачка и колебателя определяется из графика). От точки А на окружности радиуса О1А в противоположную сторону угловой скорости кулачка откладываем рабочий угол кулачка и делим его на несколько равных частей А0, А1, А2 и т.д., как разделен график . Из точки А (рисунок 9, б) радиусом, равным длине колебателя в масштабе Кl от окружности минимального радиуса строим дугу
и радиусом О1А (расстояние между осями вращения кулачка и колебателя определяется из графика). От точки А на окружности радиуса О1А в противоположную сторону угловой скорости кулачка откладываем рабочий угол кулачка и делим его на несколько равных частей А0, А1, А2 и т.д., как разделен график . Из точки А (рисунок 9, б) радиусом, равным длине колебателя в масштабе Кl от окружности минимального радиуса строим дугу  угла размаха колебателя, перенося разметку положений конца колебателя 0, 1, 2, 3 и т.д. из (рисунок 9, а).
угла размаха колебателя, перенося разметку положений конца колебателя 0, 1, 2, 3 и т.д. из (рисунок 9, а).
Из центра О1 через точки 0, 1, 2, 3, 4, 5, 6 на дуге колебателя радиусами 0-1, 0-2 проводим концентрические окружности, а из точек А0, А1, А2 и т.д. на этих окружностях длиной колебателя в масштабе делаем засечки и получаем точки 0, 1, 2, 3, 4, 5, 6. Соединив точки плавной кривой, получаем центровой профиль кулачка. Выбрав радиус ролика, и сделав обкатку во внутрь, получим действительный профиль кулачка.
а)
б)

а – диаграмма приведенных скоростей; б – проектирование кулачкового механизма.
Рисунок 9 – Синтез кулачкового механизма с роликовым колебателем.
Примечание - При построении профилей кулачков масштабный коэффициент построения можно принимать любой другой отличный от Кs', но стандартный, однако в этом случае при построении необходимо будет также определить и перемещение толкателя (колебателя) в новом принятом масштабе построения.