СНЯТИЕ КИНЕМАТИЧЕСКОЙ СХЕМЫУЗЛА СТАНКА
Методические указания
для студентов дневного, вечернего и заочного обучения
Тула 2005
Разработал: Г.В. Сундуков, доцент
| Рассмотрено на заседании кафедры АСС. Протокол № 1 от 31.08.2005 г. Зав. кафедрой ___________________А.Н. Иноземцев |
ЦЕЛЬ И ЗАДАЧИ РАБОТЫ
Целью работы является закрепление лекционного материала по устройству, работе и кинематическому разбору приводов металлорежущих станков.
Задачи работы:
- изучить устройство и кинематику коробки скоростей или подач металлорежущего станка. Составить кинематическую схему изучаемого узла;
- определить параметры зубчатых колес привода;
- произвести запись и подсчет передаточных отношений привода;
- выполнить эскизы панели управления и механизма переключения скоростей.
ТЕОРЕТИЧЕСКИЕ СВЕДЕНИЯ
2.1 В металлообрабатывающих станках имеются приводы главного движения, подач, установочных перемещений и другие, осуществляющие движение рабочих органов (шпинделей, столов, суппортов и т.д.).
Под приводом подразумевается совокупность устройств, обеспечивающих движение рабочего органа, и сам рабочий орган.
В совокупность устройств привода входят:
- источник движения, например, электродвигатель или какой-либо рабочий орган, от которого должно передаваться движение,
- устройства, передающие движение (одиночные и групповые зубчатые, ременные, гидравлические и другие передачи; механизмы, изменяющие направление движения; механизмы, преобразующие движение из вращательного в поступательное или наоборот, из непрерывного в прерывистое, и т.п.),
- валы, опоры, муфты и прочие элементы и устройства, обеспечивающие работу механизмов.
Приводы могут быть регулируемыми, позволяющими изменять скорость рабочего органа ступенчато или плавно, и нерегулируемыми.
Для ступенчатого регулирования скоростей обычно применяются различные групповые передачи или группы передач.
Группа передач – это механизм, состоящий из двух или более переключаемых передач, расположенных между двумя валами.
Часть передач и устройств или все регулируемого привода конструктивно оформляются в виде коробки скоростей (привод главного движения) или коробки подач (привод подачи).
2.2 Совокупность передач привода называют кинематической цепью.
Условное изображение кинематических цепей всех приводов станка вместе с источниками движения и рабочими органами, выполненное в контуре важнейшей проекции станка, называют его кинематической схемой.
Элементы кинематики на схеме даются в общепринятых условных изображениях. Некоторые условные изображения представлены на рис. 1,
| в частности, соединение детали о валом: свободное для вращения (рис. 1,а), подвижное без вращения (рис. 1,б), глухое (рис. 1,в); муфта кулачковая односторонняя (рис. 1,г); зубчатый конус механизма Нортона (рис. 1,д); накидная и скользящая шестерни то- |  Рис. 1. Условные изображения
элементов кинематики
Рис. 1. Условные изображения
элементов кинематики
|
го же механизма (рис. 1,е); накидная шестерня механизма Нортона, сопрягаемая с широкой шестерней (рис. 1, ж).При необходимости изображения кинематической схемы кого-либо узла станка она, как и кинематическая схема всего станка, вычерчивается в развернутом на плоскость виде с соблюдением примерных пропорций и в контуре узла.
2.3 Снятие кинематической схемы узла, т.е. рассмотрение и изображение на бумаге кинематических цепей изучаемого, узла следует начинать от первого вала, ведущего, через промежуточные к последнему, ведомому. Валы, начиная с первого вала привода, нумеруются римскими цифрами; кроме того, первый и последний валы обозначаются буквами: ведущий – ВЩ и ведомый – ВМ.
Шестерни обозначаются буквами Z с цифровым индексом по возрастающей от первого вала к последнему. Если, например, валы I и II связаны группой передач, то наименьшее колесо на валу I (ведущем) обозначается Z1, связанное с ним – Z2, следующее по величине на ведущем валу – Z3, связанное с ним – Z4 и т.д.
Пример исполнения кинематической схемы приведен на рис. 2. Привод, схема которого показана на рис. 2, содержит:
- между валами I и II реверсивный механизм с фрикционной муфтой М;
- между валами II и III группу передач на три скорости;
- между валами III и IV, IV и V две группы передач на две скорости каждая.
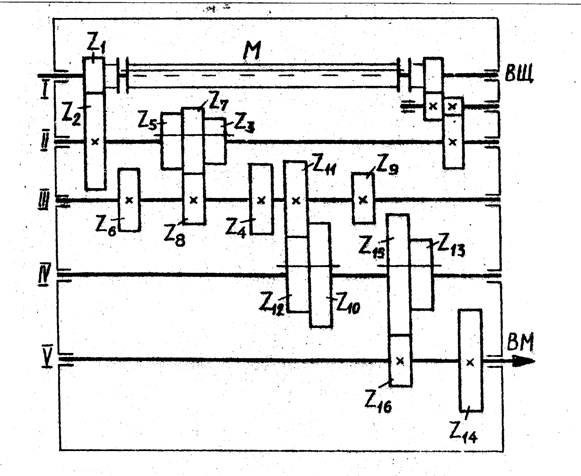 Рис. 2. Кинематическая схема коробки скоростей
Рис. 2. Кинематическая схема коробки скоростей
|
2.3 Параметры зубчатых колес реальной коробки могут быть определены следующим образом:
- числа зубьев – подсчетом;
- расчетный модуль – по формуле:
 (1)
(1)
Для расчета по формуле (1) необходимо знать наружный диаметр  одного из колес группы передач. Он замеряется с помощью кронциркуля и линейки или штангенциркуля.
одного из колес группы передач. Он замеряется с помощью кронциркуля и линейки или штангенциркуля.
Расчетный модуль сравнивается со стандартными значениями модулей из следующего ряда.
| m, мм | 1,25 | 1,5 | 1,75 | 2,25 | 2,5 | 2,75 | 3,5 |
Фактический модуль принимается равным ближайшему стандартному значению.
Коэффициенты ширины зубьев для каждой шестерни могут быть определены по формуле:
 , (2)
, (2)
где  – ширина зубчатого колеса, получаемая замером штангенциркулем или линейкой.
– ширина зубчатого колеса, получаемая замером штангенциркулем или линейкой.
Чаще всего значения  находятся в пределах 6...10.
находятся в пределах 6...10.
2.4 Передаточное отношение привода – это произведение передаточных отношений последовательно расположенных передач кинематической цепи. Передаточные отношения передач групп записываются в скобках через точку с запятой в порядке возрастания, начиная с меньшего. Любое передаточное отношение представляется в виде отношения чисел зубьев ведущего и ведомого колес.
Передаточное отношение привода может быть представлено в двух видах – буквенном и числовом.
Пример записи передаточного отношения для привода (см. рис. 2):


2.5 Расчет минимального и максимального передаточных отношений выполняется следующим образом (например, для привода по рис. 2):


| 2.6 Изменение передаточного отношения привода осуществляется при переключении передач групп с помощью специальных механизмов, часто приводимых рукоятками управления (рис. 3). На эскизе панели управления целесообразно показывать возможные положения |  Рис. 3. Эскиз панели управления
Рис. 3. Эскиз панели управления
|
рукояток управления, обозначая сами рукоятки – буквами, а их возможные положения – римскими цифрами.
2.7 Пример записи обозначения рукоятки управления, показанной на эскизе (см. рис. 3), числа возможных положений и назначения показан ниже:
| № п/п | Обозначение | Число положений | Назначение |
| I | А | 3 (I, II, III) | Для управления перемещением блока-тройки по валу II |
ОБЪЕКТЫИССЛЕДОВАНИЯ. ИНСТРУМЕНТЫ
Подлежат изучению коробки скоростей и подач универсальных металлорежущих станков, находящиеся на подставках в лаборатории станков. Таблички с наименованиями узлов прикреплены около каждого узла. Для измерения диаметров, ширины и шага шестерен следует использовать штангенциркули, кронциркули и масштабные линейки.
ЗАДАНИЕ НА РАБОТУ
Работа выполняется каждым студентом индивидуально или бригадами из двух (в порядке исключения – трех) студентов.
Каждой бригаде или индивидуально работающему студенту преподавателем предлагается для исследования конкретная коробка скоростей или подач станка.