За годы своего существования электропривод претерпел коренные изменения. В первую очередь, совершенствовались способы передачи механической энергии от двигателей к рабочим машинам. Например, в нашей стране до начала первой пятилетки (1928) господствовал групповой электропривод – "электропривод с одним электродвигателем, обеспечивающий движение исполнительных органов нескольких рабочих машин или нескольких ИО одной рабочей машины" [1], но уже к концу первой пятилетки (1932) он был изъят из промышленности.
На рис. 2.1 показана функциональная схема группового электропривода предприятия. Особенность данной схемы в механическом распределении энергии по всему предприятию и, соответственно, в механическом управлении процессом, т.е. управлении работой исполнительных органов рабочих машин. На рис. 2.2 показана другая схема группового ЭП – группового электропривода рабочих машин. В отличии от предыдущей схемы электрическая энергия здесь подводится непосредственно к РМ, а уже в них происходит ее механическое распределение. Сохраняется механическое управление работой.
К числу общих недостатков группового электропривода можно отнести: ступенчатое регулирование скорости;
малый диапазон регулирования;
опасные условия труда;
малая производительность.
Групповой электропривод был заменен более перспективным и экономичным индивидуальным электроприводом это "ЭП, обеспечивающий движение одного исполнительного органа рабочей машины" [1], функциональная схема показана на рис. 2.3.

Рис. 2.1. Групповой электропривод предприятия
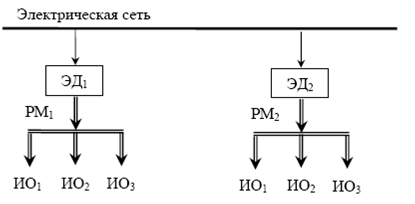
Рис. 2.2. Групповой электропривод рабочих машин
В таком варианте электропривода распределение электрической энергии происходит вплоть до рабочих органов. Также появляется возможность управления механической энергией электрическим способом. Кроме этого, индивидуальный привод позволяет в ряде случаев упростить конструкции РМ, т.к. ЭД нередко конструктивно является рабочим органом (вентилятор, электродрель и т.п.).
В настоящее время индивидуальный ЭП – это основной тип промышленно используемого электропривода. Но не единственный. В ряде производственных механизмов находит применение взаимосвязанный электропривод это два или несколько электрически или механически связанных между собой электроприводов, при работе которых поддерживается заданное соотношение их скоростей и (или) нагрузок и (или) положения исполнительных органов рабочих машин".
Этот тип электропривода объединяет два вида электроприводов – многодвигательный ЭП и электрический вал.
Многодвигательный электропривод (рис. 2.4) – "электропривод, содержащий несколько электродвигателей, механическая связь между которыми осуществляется через исполнительный орган рабочей машины" [1]. Подобный электропривод в ряде случаев позволяет снизить усилия в рабочем органе, распределить их в механизме более равномерно, повысить надежность и производительность установки.

Рис. 2.3. Индивидуальный электропривод

Рис. 2.4. Многодвигательный электропривод

Рис. 2.5. Иллюстрация работы электрического вала
Многодвигательный электропривод применяется в шахтных подъемниках, в частности впервые был использован в Шепетовке в конце XIX века.
Электрический вал – "взаимосвязанный электропривод, обеспечивающий синхронное движение двух или более исполнительных органов рабочей машины, не имеющих механической связи" [1]. В качестве примера можно привести приводы шлюзов и длинные конвейерные линии. На рис. 2.5 приведена схема конвейера на асинхронных ЭД с фазным ротором, поясняющая принцип работы электрического вала. Частоты вращения ω1 и ω2, благодаря электрическому соединению роторов электродвигателей, будут одинаковыми или синхронными.
Современный электропривод отличается широким разнообразием применяемых средств управления от обычной коммутационной аппаратуры до управляющих ЭВМ, большем диапазоном мощностей ЭД – от долей ватта до 50000 кВт, диапазоном регулирования скоростей до 10000:1 и более, применением как тихоходных двигателей (сотни об/мин), так и сверхскоростных (до 200000 об/мин). ЭП является основой автоматизации технологических объектов в промышленности, сельском хозяйстве, космосе; реализуя важнейшую задачу современности - повышение производительности труда.
В настоящее время для электропривода характерна тенденция использования энергосберегающих технологий. К традиционным системам, позволяющим возвращать энергию в сеть (этот процесс называется рекуперацией), таким как система генератор-двигатель (система Г-Д), электрический каскад ( регулируемый ЭП с АД с фазным ротором, в котором энергия скольжения возвращается в электрическую сеть ), электромеханический каскад (регулируемый ЭП с АД с фазным ротором, в котором энергия скольжения преобразуется в механическую и передается на вал ЭД), происходит массовая замена нерегулируемого электропривода на регулируемый. Как следствие этого, конструкция ЭП становится безредукторной, что повышает общий КПД привода. Прогресс в области конструирования преобразовательной техники, в частности, для преобразователей частоты стимулирует замену двигателей постоянного тока и синхронных ЭД на более дешевые и надежные асинхронные ЭД с короткозамкнутым ротором.
Если рассматривать электродвигательные установки с позиций теории электропривода, то как объект изучения это электромеханическая система, являющаяся совокупностью механических и электромеханических устройств, объединенных общими силовыми электрическими цепями и (или) цепями управления, предназначенная для осуществления механического движения объекта. В электроприводе в единое целое объединяется три части (рис 2.6): механическая часть, электрический двигатель и система управления. Механическая часть включает все движущиеся элементы механизма – ротор двигателя РД, передаточное устройство ПУ, исполнительный механизм ИМ, на который передается полезный механический момент Ммех.
В электродвигательное устройство входят электромеханический преобразователь энергии ЭМП, преобразующий электрическую мощность в механическую, и ротор двигателя РД на который воздействует электромагнитный момент М двигателя при угловой скорости ω.
Система управления (СУ) включает в себя энергетическую часть ЭСУ и информационную часть ИСУ. На ИСУ поступают сигналы от задающих устройств ЗУ и датчиков обратной связи ДOC.

Рис. 2.6. Функциональная схема ЭП
Передаточное устройство ПУ служит для преобразования механических параметров на валу ЭД – момента МВ и частоты вращения ωВ и передачи их исполнительному механизму ИМ.
Примером ПУ может служить редуктор для преобразования угловой частоты вращения (рисунок 1.2,а) в соответствии с передаточным числом i = ωВЫХ/ωВХ. ПУ может также служить для преобразования вращательного движения вала двигателя с частотой ω в возвратно – поступательное с линейной скоростью V (рисунок 1.2,b, c).
В автоматизированных электроприводах сигнал управления формируется при сравнении сигналов задающего устройства (ЗУ) и датчиков обратных связей (ДОС).
 |