Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования

| «Московский государственный технический университет имени Н.Э. Баумана» (МГТУ им.Н.Э. Баумана) |
Факультет РТ
Кафедра РЛ-1 «Радиоэлектронные системы и устройства»
Лабораторная работа по курсу «Спутниковые радионавигационные системы»
Выполнил: студент гр. РТ1-101 Березин А.А.
Руководитель: Мыкольников Я.В.
Москва, 2015
Введение
Данная лабораторная работа посвящена изучению приёмной аппаратуры потребителя навигационной информации, продуцируемой объединённой спутниковой радионавигационной системой, включающей в себя ГЛОНАСС и GPS.
Тема: «Основы характеристики навигационной аппаратуры потребителя»
Цель – изучение основных характеристик спутниковой радионавигационной системы при изменении конфигурации орбитального сегмента системы, моделируемом клиентской программой при управлении приёмником.
Описание лабораторной установки
Лабораторная установка представляет собой аппаратуру потребителя. Аппаратура потребителя включает в себя антенну, приёмник, компьютерную клиентскую программу (см. рис.1):
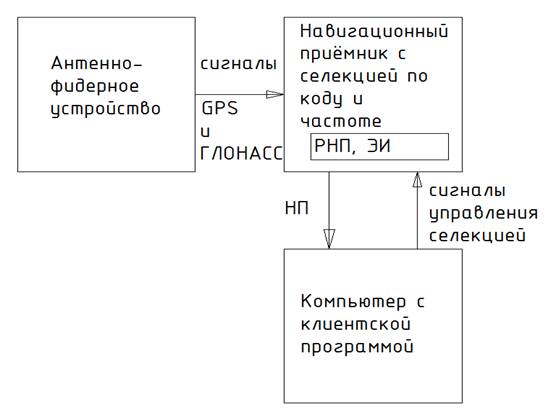
Рисунок 1 – Схема лабораторной установки
Аппаратура потребителя предназначена для многоканального приёма радиосигналов от навигационных спутников в антенно-фидерном устройстве, измерения радионавигационных параметров в приёмнике
Используемые системы координат
Геодезическая широта B определяется как угол меду нормалью к поверхности общеземного эллипсоида и плоскостью экватора. Геодезическая долгота L определяется как угол в плоскости экватора между плоскостью нулевого меридиана, в котором лежит ось X, и плоскостью меридиана, на котором расположена точка с задаваемыми координатами.
Е2 = (2 - α) α.
Рисунок 2 – Геодезические координаты
Переход от геодезических к геоцентрическим координатам:
Х = (N + Н) cosBcosL
У= (N + Н) cosBsinL
Z = (N + Н – Ne2)sinB,
где  – длина нормали на широте B.
– длина нормали на широте B.
Обратный переход к геодезическим координатам производится следующим образом:
L=arctg(Y/X)


Картографическая проекция Гаусса-Крюгера является равноугольной, то есть сохраняющей значения углов при развёртывании поверхности общеземного эллипсоида на плоскость. Разбивка значений производится на зоны – по 6° меридиана каждая. Например, координата Y=06183362 означает расположение определяемой координатами точки в 6-ой зоне.
Рисунок 3 – Картографическая проекция Гаусса-Крюгера
Геометрический фактор GDOP=HDOP2+VDOP2+TDOP2 (geometric delution of precision).
Ход работы
Часть 1
Лабораторная установка: модуль НВ-08 – навигационной приёмник, антенна, компьютер.
Полное включение
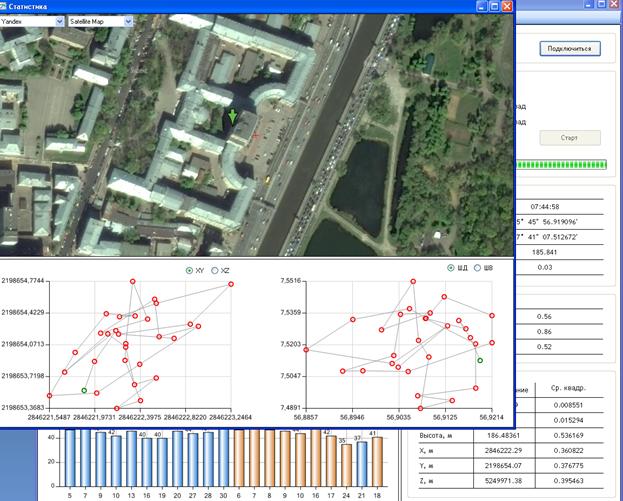
Рисунок 3 – Данные при обработке сигналов с группировки полного включения
При полном включении достигается самая высокая тонность определения координат.
GPS 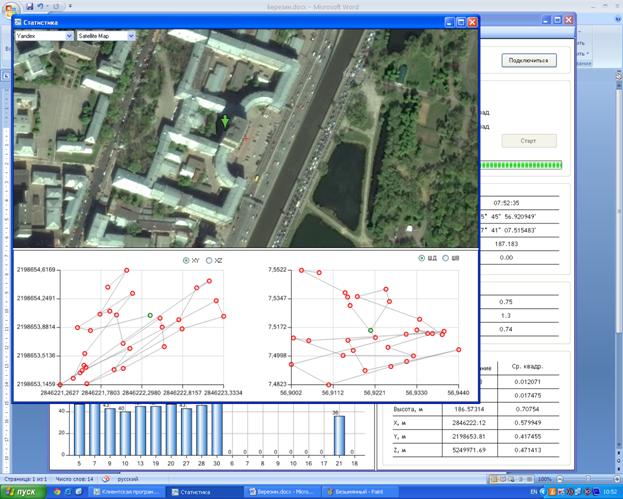
Рисунок 4 – Данные при обработке сигналов с группировки GPS
Рисунок 5 – Данные при обработке сигналов с группировки GPS
В настоящее время эфемеридные данные и синхронизация бортовой шкалы времени GPS более точные, чем у незаконченной группировки ГЛОНАСС. После окончания формирования группировки ГЛОНАСС точность сравнится с GPS. Данные параметров точности GPS, определяемые конфигурацией созвездия, имеют односуточную периодичность, ГЛОНАСС имеет четырёхсуточную периодичность.
ГЛОНАСС

Рисунок 6– Данные при обработке сигналов с группировки ГЛОНАСС
Точность навигационных данных с группировки GPS и ГЛОНАСС в отдельности примерно одинакова.
Квазиоптимальное созвездие
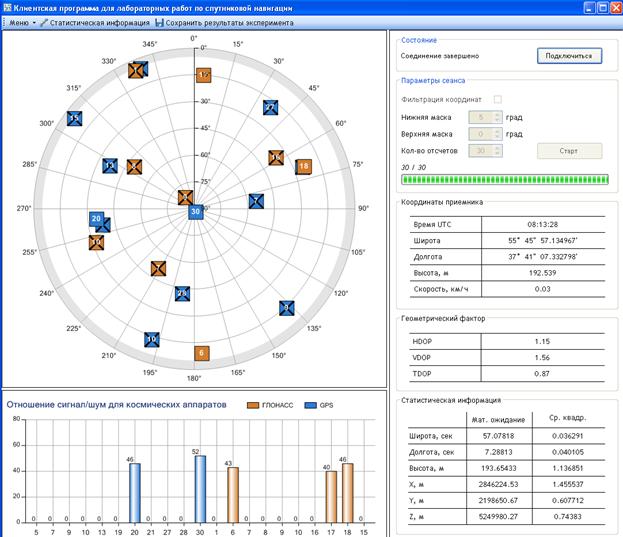
Рисунок 7 – Данные при обработке сигналов с группировки неполном включении
Выбранная группировка спутников является квазиоптимальной, в форме пентаэдра, что обеспечивает наименьший геометрический фактор. Необходимо выбирать группировку GPS и ГЛОНАСС спутников в пропорции 3X2, так как бортовые шкалы времени GPS и ГЛОНАСС различны, для определённого решения навигационного уравнения требуется минимум два спутника с одной шкалой.
Минимально достижимое значение геометрического фактора при оптимальном созвездии равен 2 в случае гарантированной работы с четырьмя спутниками в конфигурации тетраэдра.
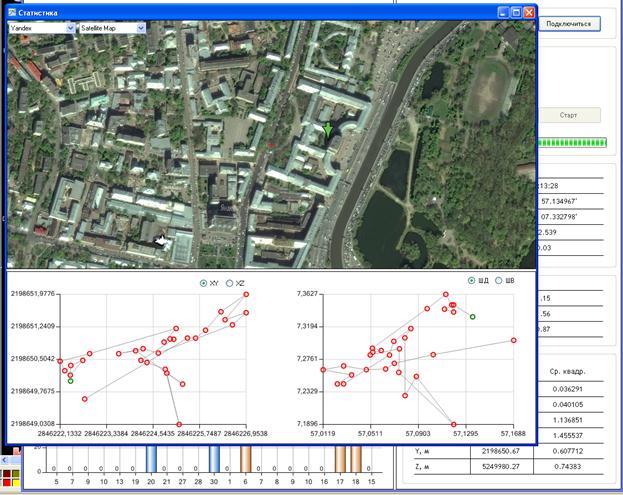
Рисунок 8 – Данные при обработке сигналов с группировки неполном включении
Группировка “Городской каньон”
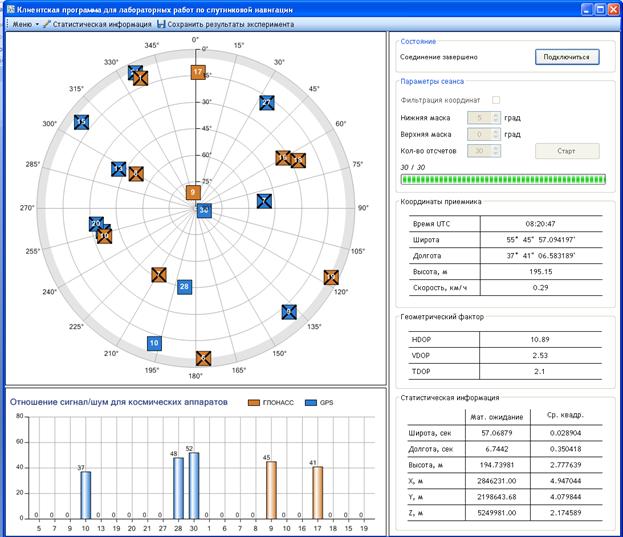
Рисунок 9 – Данные при обработке сигналов с группировки “Городской каньон”
Горизонтальный геометрический фактор увеличен вследствие уменьшения поперечной базы созвездия спутников.
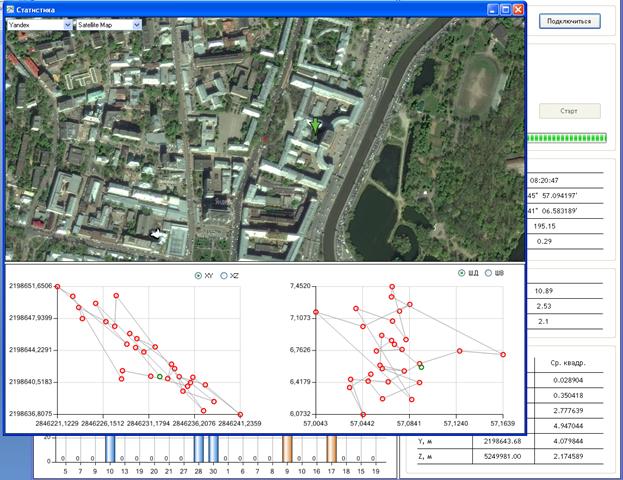
Рисунок 10 – Данные при обработке сигналов с группировки “Городской каньон”
Наблюдение низкого созвездия НКА
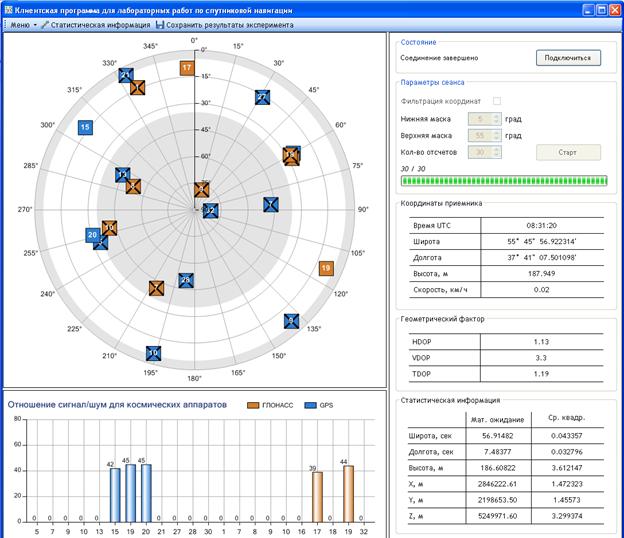
Рисунок 11 – Данные при обработке сигналов с группировки низкого созвездия
.

Рисунок 12 – Данные при обработке сигналов с группировки низкого созвездия

Рисунок 13 – Данные при обработке сигналов с группировки низкого созвездия
Наблюдение высокого созвездия НКА
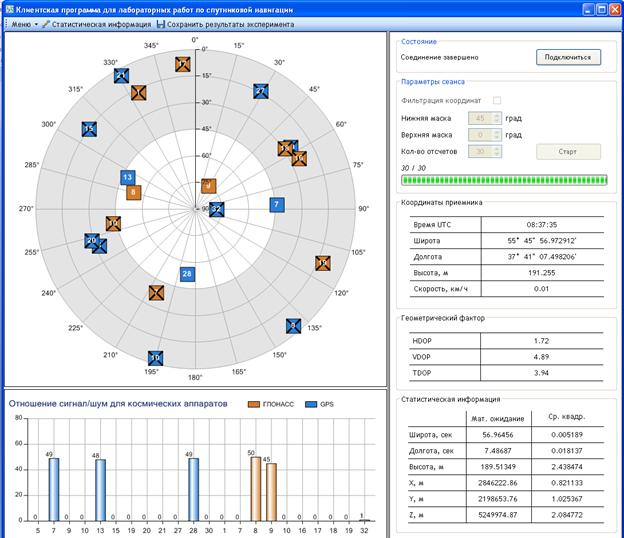
Рисунок 14 – Данные при обработке сигналов с группировки высокого созвездия
Погрешность по высоте по сравнению с низким созвездием в среднем не изменилась по причине неоптимальной конфигурации выбранных спутников. Точность определения координат по высоте должна быть выше, чем в случае низкого созвездия.
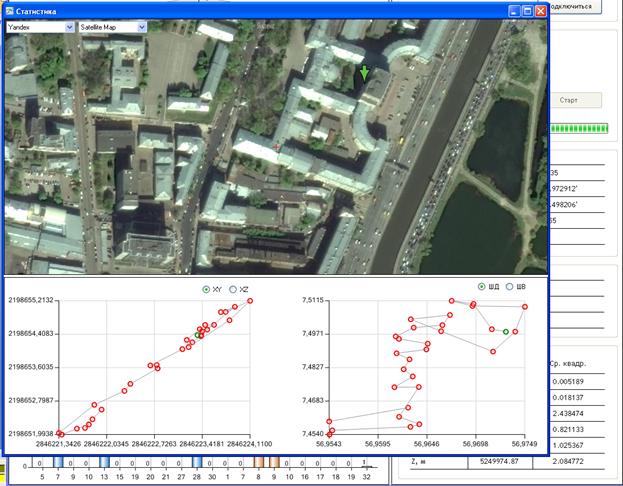
Рисунок 15 – Данные при обработке сигналов с группировки высокого созвездия
Увеличен вертикальный геометрический фактор и увеличилась ошибка временных определений.
Фильтрация
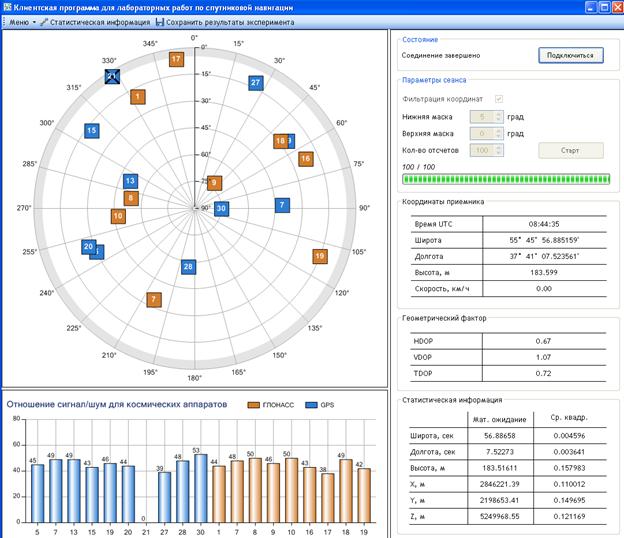
Рисунок 18 – Данные при обработке сигналов при включении фильтрации

Рисунок 19 – Данные при обработке сигналов при включении фильтрации
Выводы по части 1: конфигурация группировки спутников влияет на геометрический фактор, что приводит к увеличению зоны неопределённости измерений псевдодальности.
Часть 2
Экспериментальные данные
Точка 1
Прибор предыдущего поколения
X1=2846237,41
Y1=2198658,17
Z1=5249977,78
Прибор следующего поколения
Y1=06183362
X1=07417598
H1=184 м
Точка 2
Прибор предыдущего поколения
X2=2846217,22
Y2=2199856,79
Z2=5249996,30
Прибор следующего поколения
Y2=06183362
X2=07417598
H2=189 м
Точка 3
Прибор предыдущего поколения
X3=2846214,65
Y3=2198673,40
Z3=5249993,90
Прибор следующего поколения
Y3=06183377
X3=07417628
H3=194 м
Точка 4
Прибор предыдущего поколения
X4=2846238,50
Y4=2198677,30
Z4=5249980,60
Прибор следующего поколения
Y4=06183349
X4=07417615
H4=190 м
Точки 1-2
ДУ=24,83°
S=23,63 м
Точки 2-3
ДУ=113°25´20´´
S=18,33 м
𝛥H=0,08 м
ДУ=114,52°
S=16,18 м
Точки 3-4
ДУ=208°10´09´´
S=29,71 м
𝛥H=0,17 м
ДУ=206,85°
S=29,98 м
Расчёт