Геометрическая функциональная модель машины постоянного тока, работающей в режиме генератора, представлена на рис. 1.
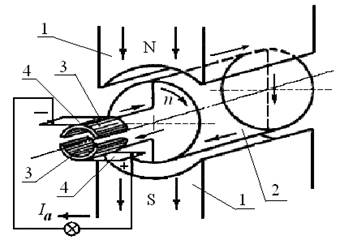
Рис. 1. Геометрическая функциональная модель машины постоянного тока
Машина постоянного тока, как любая электрическая машина, имеет неподвижную и вращающуюся части.
Неподвижная часть машины, называемая индуктором, состоит из полюсов 1 и круглого стального ярма, к которому прикрепляются полюсы. Назначением индуктора является создание в машине основного магнитного потока.
Вращающаяся часть машины состоит из цилиндрического якоря 2 и коллектора 3. Якорь состоит из сердечника, набранного из листов электротехнической стали, и обмотки, укрепленной на сердечнике якоря. Концы секций обмотки соединены с изолированными от вала медными пластинами коллектора. На коллектор налегают неподвижные щетки 4, с помощью которых обмотка якоря соединяется с внешней цепью, если машина работает генератором, или подключаются к источнику питания постоянного тока, если работает двигателем.
Основной магнитный поток в машинах постоянного тока создается обмоткой возбуждения, которая расположена на сердечниках полюсов и питается постоянным током.
Магнитный поток проходит от северного полюса N через якорь к южному полюсу S и от него через ярмо снова к северному полюсу.
В режиме двигателя машина работает, если к ее обмотке якоря подвести постоянный ток от внешнего источника. При этом на проводники обмотки якоря будут действовать электромагнитные силы  и возникнет электромагнитный момент
и возникнет электромагнитный момент  . При достаточной величине
. При достаточной величине  якорь машины придет во вращение и будет развивать механическую мощность. Момент при этом является движущим и действует в направлении вращения[1].
якорь машины придет во вращение и будет развивать механическую мощность. Момент при этом является движущим и действует в направлении вращения[1].
В режиме двигателя коллектор превращает потребляемый из внешней цепи постоянный ток в обмотке якоря в переменный ток и работает, таким образом, в качестве механического инвертора тока.
Проводники обмотки якоря двигателя также вращаются в магнитном поле, и поэтому в обмотке якоря двигателя индуктируется ЭДС  . В двигателе ЭДС якоря направлена против тока
. В двигателе ЭДС якоря направлена против тока  и приложенного к зажимам якоря напряжения
и приложенного к зажимам якоря напряжения  . Поэтому ЭДС якоря двигателя называется противоэлектродвижущей силой, противо-ЭДС.
. Поэтому ЭДС якоря двигателя называется противоэлектродвижущей силой, противо-ЭДС.
Для двигателей постоянного тока принято их работоспособность рассматривать по следующим режимам работы:
- установившийся режим работы;
- пусковые, тормозные режимы работы и режим реверса, который связан с изменением направления вращения вала двигателя;
- режимы регулирования скорости вращения вала.
1.2. Расчетная схема двигателя постоянного тока
Учитывая конструктивные особенности исполнения ДПТ, где взаимодействия магнитных полей перпендикулярны друг другу, а ЭДС вращения наводится в обмотке якоря, расчетную схему модели двигателя можно представить в виде (рис. 2) [2].
Рис. 2. Расчетная схема ДПТ
для математической модели
Обмотка возбуждения (ОВ) располагается на оси  , а обмотка якоря на оси
, а обмотка якоря на оси  .
.  – напряжения обмоток ОВ и ОЯ соответственно.
– напряжения обмоток ОВ и ОЯ соответственно.  – ЭДС вращения в обмотке якоря (ОЯ). Координатные оси a, b неподвижны в пространстве (w k = 0) с расположенными на них обмотками ОВ и ОЯ. В обмотке возбуждения (ОВ) ЭДС вращения не наводится, так как магнитное поле обмотки якоря неподвижно в пространстве.
– ЭДС вращения в обмотке якоря (ОЯ). Координатные оси a, b неподвижны в пространстве (w k = 0) с расположенными на них обмотками ОВ и ОЯ. В обмотке возбуждения (ОВ) ЭДС вращения не наводится, так как магнитное поле обмотки якоря неподвижно в пространстве.
2 Математическое описание процессов в ДПТ
Для электромеханического преобразователя постоянного тока, т. е. ДПТ, необходимо записать следующую систему уравнений равновесия напряжений, в которых в качестве переменных приняты значения токов в обмотках ОВ и ОЯ:
 (1)
(1)
где U B= US a - напряжение обмотки возбуждения; U Я= Ur b - напряжение обмотки якоря; i В, i Я, R В, R Я, L В, L Я - токи, сопротивления и индуктивности соответственно обмотки возбуждения и обмотки якоря; er b= ce wF - противо-ЭДС обмотки якоря (ЭДС вращения)[3].
Эти уравнения дополняются уравнением механического равновесия и выражением для электромагнитного момента, представленного через токи двух обмоток. Полученную систему уравнений нужно привестит к виду, удобному для математического моделирования (к виду Коши).
На этом заканчивается этап математического описания процессов в электромеханическом преобразователе энергии постоянного тока, и приступаем к разработке расчетной части математической модели[4].
 (2)
(2)
Lm - взаимная индуктивность обмотки якоря и обмотки возбуждения; LВ = Lm + LσS; L Я= Lm + Lσr - индуктивности обмоток возбуждения и якоря.
Установившийся режим работы двигателя постоянного тока описывается так называемой полной системой уравнений, которую можно получить, приравняв все производные нулю:
 (3)
(3)
где  – конструктивный коэффициент;
– конструктивный коэффициент;  – магнитный поток, создаваемый обмоткой возбуждения;
– магнитный поток, создаваемый обмоткой возбуждения;  – ЭДС вращения.
– ЭДС вращения.
В теории электропривода постоянного тока вводят понятие коэффициента связи  при номинальном потоке возбуждения
при номинальном потоке возбуждения  , отражающего взаимосвязи обмотки якоря ДПТ с ЭДС вращения и электромагнитным моментом:
, отражающего взаимосвязи обмотки якоря ДПТ с ЭДС вращения и электромагнитным моментом:
 .
.
Для разработки математических моделей необходимо сформировать блок исходных данных, который обычно для двигателей постоянного тока содержит каталожные данные, а именно:
 – номинальную мощность двигателя, кВт;
– номинальную мощность двигателя, кВт;
 – номинальное напряжение обмотки якоря, В;
– номинальное напряжение обмотки якоря, В;
 – номинальный ток обмотки якоря двигателя, А;
– номинальный ток обмотки якоря двигателя, А;
 – сопротивление обмотки якоря двигателя, Ом;
– сопротивление обмотки якоря двигателя, Ом;
 – сопротивление дополнительных полюсов двигателя, Ом;
– сопротивление дополнительных полюсов двигателя, Ом;
 – сопротивление компенсационной обмотки двигателя, Ом;
– сопротивление компенсационной обмотки двигателя, Ом;
 – индуктивность обмотки якоря двигателя, Гн;
– индуктивность обмотки якоря двигателя, Гн;
 – номинальный коэффициент полезного действия, %;
– номинальный коэффициент полезного действия, %;
 – номинальную частоту вращения, об/мин;
– номинальную частоту вращения, об/мин;
 – момент инерции якоря, кг×м2.
– момент инерции якоря, кг×м2.
Далее необходимо определить параметры двигателя и соответственно
С помощью естественных и искусственных статических электромеханических  и механических характеристик
и механических характеристик  двигателя постоянного тока оценивают принудительное регулирование скорости электродвигателя в зависимости от требований технологического процесса[5].
двигателя постоянного тока оценивают принудительное регулирование скорости электродвигателя в зависимости от требований технологического процесса[5].
Аналитические выражения для данных характеристик получают из системы уравнения (3), и они имеют следующий вид:
 ; (4)
; (4)
 , (5)
, (5)
где знак «+» соответствует режиму рекуперативного (генераторного) торможения; знак «–» – режимам двигательному, противовключения и динамическому торможению;  – полное сопротивление цепи обмотки якоря;
– полное сопротивление цепи обмотки якоря;  – сопротивление двигателя, равное сумме сопротивлений обмотки якоря, дополнительных полюсов и компенсационной обмотки.[6]
– сопротивление двигателя, равное сумме сопротивлений обмотки якоря, дополнительных полюсов и компенсационной обмотки.[6]
Задаем параметры двигателя в MathCAD:



Динамические режимы электропривода постоянного тока – это режимы работы при переходе от одного установившегося состояния привода к другому, происходящие во время пуска, торможения, реверсирования или изменения нагрузки на валу двигателя. Эти режимы характеризуются изменениями ЭДС, угловой скорости, момента и тока.
Все эти режимы сопровождаются электромеханическими переходными процессами, которые представляют взаимосвязанные между собой электромагнитные и механические процессы.
Анализ этих процессов достаточно легко в настоящее время осуществить с использованием математических моделей ДПТ НВ, реализованных в системе MathCAD[7].
Для реализации таких моделей в среде MathCAD воспользуемся численным методом решения уравнений.
Принимаем при исследовании динамического режима пуска двигателя допущение, что магнитный поток – величина постоянная, и определяется только значением тока в обмотке возбуждения.
Поэтому с учетом допущения систему уравнений (2) приведем к уравнениям Коши и запишем в виде:
 (6)
(6)
При нулевых начальных условиях система итерационных уравнений для расчета переходных процессов при пуске двигателя постоянного тока будет иметь следующий вид

 (7)
(7)
 .
.

Принцип работы транзисторного ШИМ основан на использовании транзисторов в ключевом режиме: транзистор пропускает ток при подаче управляющего сигнала и перестает его пропускать после снятия сигнала.
Транзисторные ШИМ в первом приближении можно считать идеальными звеньями с бесконечно малой инерционностью и бесконечно малым внутренним сопротивлением и для анализа систем ШИМ пользоваться выражениями механической характеритики и передаточной функции, полученной непосредственно для двигателя.
Схема управления ШИМ вырабатывает и распределяет во времени последовательности импульсов для управления отпиранием и запиранием силовых тиристоров и транзисторов. Эта схема, позволяющая получить силовые импульсы требуемой длительности в зависимости от уровня напряжения управления при постоянном периоде следования импульсов, получила название широтно-импульсного модулятора (ШИМ). 


Заключение
Математическая модель позволяет анализировать пуск электропривода с импульсным управлением на участке контактной сети.
В ходе выполнения данной лабораторной работы была произведена оценка эффективности использования широтно-импульсных преобразователей для плавного пуска двигателя.
В процессе работы были построены статические и энергетические характеристики, а также методом математического моделирования в пакете “Matcad” получена модель системы ШИМ – ДПТ.
Из построенных графиков видно, что при постепенном увеличении коэффициента заполнения, пусковой ток сократился примерно в 6 раз, снизилась начальная угловая скорость, что позволит продлить срок жизни двигателя.
Список использованной литературы:
1 Бронов, С. А. Автоматизированное проектирование электромеханических систем: учебное пособие / С. А. Бронов, А. В. Марарескул. — Красноярск, 2007. — 100с.
2 Бронов, С. А. Автоматизированное проектирование электромеханических систем: учебное пособие для самостоятельного изучения / С. А. Бронов, А. В. Марарескул. — Красноярск, 2007. — 50 с.
3 Вольдек, А. И. Электрические машины: Учебник для вузов. — 3-е изд., перераб. / А. И. Вольдек. — Л.: Энергия, 1978. — 832 с.
4 Важнов, А. И. Переходные процессы в машинах переменного тока / А. И. Важнов. — Л.: Энергия. Ленингр. отд-ние, 1980. — 256 с.
5 Ковач, К. П. Переходные процессы в машинах переменного тока: пер. с нем. / К. П. Ковач, И. Рац. — М.; Л.: Госэнергоиздат, 1963. — 744 с.
6 Копылов, И. П. Математическое моделирование электрических машин: учебник для вузов / И. П. Копылов. — М.: Высшая школа, 1987. — 248 с.
7 Копылов, И. П. Математическое моделирование электрических машин: учебник для вузов / И. П. Копылов. — 3-е изд., перераб. и доп. — М.: Высшая школа, 2001. — 327 с. — ISBN 5-06-003861-0.
8 Сипайлов, Г. А. Электрические машины (специальный курс): учебник для вузов / Г. А. Сипайлов, Е. В. Кононенко, К. А. Хорьков. — 2-е изд., перераб. и доп. — М.: Высшая школа, 1987. — 287 с.