Под схемой механизации погрузочно-разгрузочных работ (ПРР) и складских операций понимают комплекс машин, устройств и складского оборудования, обеспечивающий переработку заданного объема грузов с наименьшим числом операций или максимальным числом совмещений грузовых операций и минимальными затратами.
При выборе подъемно-транспортных машин и устройств руководствуются следующими критериями:
· машины и устройства должны иметь эксплуатационную надежность, необходимую прочность и устойчивость, высокий КПД, безопасный режим для обслуживающего персонала, небольшую собственную массу;
· производительность должна соответствовать условиям и объему работ, обеспечивая сокращение простоя транспортных средств под грузовыми операциями;
· должна обеспечиваться комплексная механизация погрузочно-разгрузочных и складских работ, а где возможно, и автоматизация этих работ;
· при производстве погрузочно-разгрузочных и складских работ должна обеспечиваться сохранность грузов;
· тип подъемно-транспортных машин должен соответствовать габаритным размерам и массе перерабатываемых грузов;
· должна обеспечиваться экономичность применяемых машин и устройств.
Выбор и характеристика механизации поргузочно-выгрузочных работ на местах общего пользования
Повагонные отправки
Комплексная механизация, автоматизация погрузочно-разгрузочных работ с тарно-штучными грузами. Для производства погрузочно-разгрузочных работ я предлагаю использовать следующие механизмы:
1. Электропогрузчик ЭП-103КАС;
2. Кран-штабелер стеллажный опирающийся на напольный рельс, опирающийся на стеллаж и подвесной г/п 0,25...12,5 т
 Для погрузки и выгрузки повагонных отправок я выбрал электропогрузчик ЭП-103КАС;
Для погрузки и выгрузки повагонных отправок я выбрал электропогрузчик ЭП-103КАС;
Электропогрузчик – это машина циклического действия для подъема и перемещения штучных грузов совершают необходимый для этого рабочий ход, чередующийся с обратным холостым ходом, период действия их чередуется с паузами на захват и отдачу груза.
Технические характеристики:
| данные | Изготовитель | ОАО «МЗиК» (Россия) | |
| Модель | ЭП-103КАС | ||
| Электропривод, электрическая сеть | Электрический | ||
| Управление: ручное, поводковое, стоя, сидя | Сидя | ||
| Грузоподъемность | |||
| Расстояние до центра тяжести груза | |||
| Расстояние от спинки вил до оси переднего моста | |||
| Колесная база | |||
| Масса | Собственная масса (включая батарею строка 6.5) | ||
| Нагрузка на ось с грузом спереди | |||
| Нагрузка на ось с грузом сзади | |||
| Нагрузка на ось без груза спереди | |||
| Нагрузка на ось без груза сзади | |||
| Колёса и шины | |||
| Размеры шин спереди | 6.00-9 SE | ||
| Размеры шин сзади | 4.00-8 SE | ||
| Колеса, количество спереди (х = приводные) | 2x | ||
| Колеса, количество сзади | |||
| Ширина колеи спереди | |||
| Ширина колеи сзади | |||
| Размеры | Угол наклона мачты/каретки вил вперед | ||
| Угол наклона мачты/каретки вил назад | |||
| Высота мачты, в задвинутом положении | 2130 (2020**) | ||
| Высота свободного подъема вил | 0 (1500**) | ||
| Высота подъема вил | 3300 (2000, 2900, 3200, 4500)** | ||
| Высота мачты, в выдвинутом положении | 3770 (3370**) | ||
| Высота по ограждению | 2145 (2065**) | ||
| Общая длина, включая вилы | |||
| Длина, включая спинку вил | |||
| Общая ширина | |||
| Ширина вил | |||
| Длина вил | |||
| Дорожный просвет под мачтой | |||
| Дорожный просвет по центру колесной базы | |||
| Ширина прохода с поддоном 1000х 1200 (l6х b12), расположенного поперёк вил | |||
| Ширина прохода с поддоном 800 х1200 (l6х b12), расположенного вдоль вил | |||
| Минимальный радиус поворота | |||
| Расстояние до центра поворота |
Для производства погрузочно-разгрузочных работ предлагается:
Стеллажный кран – штабелер.
Для обслуживания складов тарно-штучных грузов применяют мостовые канны – штабелеры, которые являются одной из разновидностей мостовых кранов. Вместо гибкой канатной грузовой подвески они имеют вертикальную колонну, по которой перемещается грузозахват. Это обеспечивает жесткий подвес груза и возможность полной автоматизации перегрузочных и складских работ при переработке тарно-штучных грузов на складах. Применяют мостовые краны-штабелеры в закрытых складах для переработки тарно-штучных грузов. Разновидностью мостовых кранов-штабелеров являются стеллажные краны-штабелеры, обслуживающие преимущественно высотные склады. По конструкции бывают:
– по числу вертикальных колонн – с одной или двумя колоннами;
– по способу управления – с ручным управлением из подъемной кабины, полуавтоматическим, автоматическим;
– по числу грузозахватов – с одним или двумя;
– по типу грузозахвата – с телескопическим грузозахватом; с поворотно-выдвижными вилами.
Грузоподъемность стеллажных кранов находится в пределах 0,25-12,5 т, наибольшая высота подъема 18 м, скорость подъема 0,1-0,5 м/с, скорость передвижения 1,0-2,5 м/с, скорость выдвижения грузозахвата 0,13-0,26 м/с, высота нижнего (первого) яруса над полом 0,4-0,75 м; ширина межстеллажного прохода 0,8-1,4 м (на 150-300 мм шире перемещаемого груза).
Достоинства стеллажных кранов-штабелеров: хорошее заполнение складских объемов грузами (за счет узкого межстеллажного прохода и большой высоты подъема); высокая производительность; возможность полной автоматизации складских работ.
Недостатки: узкая специализация по функциям (только обслуживание высотных стеллажей в зоне хранения) и по перерабатываемым грузам (определенные размеры пакетов); обслуживание только двух стеллажей, ограниченная зона действия.
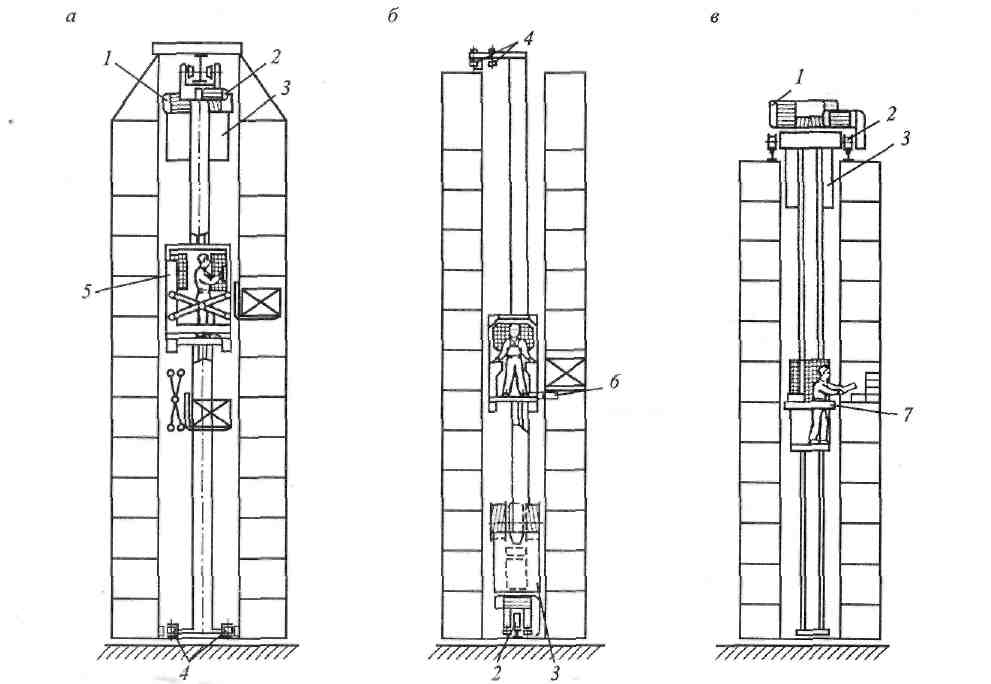
Рисунок 2.1 – Стеллажные краны-штабелеры:
а – подвесной; б – опирающийся на напольный рельс: в – опирающийся на стеллаж;
1 – механизм подъема; 2 – ходовая часть; 3 – шкаф с электроаппаратурой; 4 – горизонтальные ролики; 5 – выдвижной поворотный захват; 6 –подвижной телескопический захват; 7– стол.