МАТЕМАТИЧЕСКИЕ МОДЕЛИ В ФОРМЕ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ
Базовые понятия
Математические модели в форме передаточных функций получили наибольшее применение для описания физических процессов в линейных стационарных динамических системах. Передаточные функции - динамические модели.
Базовым понятием в теории передаточных функций является преобразование Лапласа:
 (3.1)
(3.1)
которое устанавливает соответствие между функцией x(t) – вещественной переменной t и функцией X(s) – комплексной переменной s:
s = σ + jω, (3.2)
где x(t) – оригинал; X(s) – изображение (изображение по Лапласу).
Это соответствие обозначается так:

 X(s) (3.3)
X(s) (3.3)
или  (3.4)
(3.4)
Основные свойства преобразования Лапласа:
1) линейность:
 (3.5)
(3.5)
2) дифференцирование:
при нулевых начальных условиях –
x(0) = x′(0) = x″(0) = … = x(n-1) (0) = 0 (3.6)
справедливо:
 (3.7)
(3.7)
3) интегрирование:
 (3.8)
(3.8)
4) теорема запаздывания:
 (3.9)
(3.9)
5) теорема о свертке:
 (3.10)
(3.10)
где  ,
,  – свертка функций x1(t) и x2(t) (интеграл свертывания).
– свертка функций x1(t) и x2(t) (интеграл свертывания).
Передаточная функция в форме изображений Лапласа
Пусть физическая система (см. рис. 3.1) описывается математической моделью в форме линейного дифференциального уравнения
a2y″(t)+a1y′(t)+a0y(t) = b1x′(t)+b0x(t) (3.11)
при нулевых начальных условиях:
 y(0) = y′(0) = 0.
y(0) = y′(0) = 0.
Применим преобразование Лапласа:
 (3.12)
(3.12)
Используя свойства линейности и дифференцирования оригинала, получим:
 (3.13)
(3.13)
или
 . (3.14)
. (3.14)
Выразим отношение изображения выходной величины Y(s) системы к изображению входной величины X(s):
 (3.15)
(3.15)
где  – передаточная функция системы в форме изображений Лапласа.
– передаточная функция системы в форме изображений Лапласа.
Рассмотрим физическую систему с двумя входами (рис. 3.1).
Если физическая система имеет несколько входов, то она может быть описана несколькими передаточными функциями по каждому входу.
При определении передаточной функции относительно одной из входных величин остальные входные величины полагаются равными нулю.
Пусть физическая система описывается математической моделью вида:
a3y′′′(t)+a1y′(t)+a0y(t)= b2x′′(t)+b0x(t)+c0f(t) (3.16)
при нулевых начальных условиях.
Перейдем к изображениям Лапласа:
 (3.17)
(3.17)
Положим F(s) = 0, тогда передаточная функция относительно входа x(t)
 (3.18)
(3.18)
Положим X(s) = 0, тогда передаточная функция относительно входа f(t)
 (3.19)
(3.19)
Для линейной физической системы с несколькими входами и выходами (рис. 3.2) передаточная функция превращается в матричную передаточную функцию:
 (3.20)
(3.20)
где
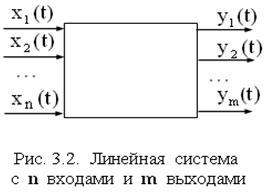
 – (3.21)
– (3.21)
передаточная функция между i-м входом и j-м выходом.
Передаточная функция
В операторной форме
Передаточная функция в операторной форме получается формальным путем из дифференциального уравнения.
Пусть физическая система описывается линейной математической моделью вида:
a2y′′(t) + a1y′(t) + a0y(t) = b1x′(t) + b0x(t). (3.22)
Введем оператор  , обозначающий операцию дифференцирования. Сделаем подстановку его в дифференциальное уравнение (3.21):
, обозначающий операцию дифференцирования. Сделаем подстановку его в дифференциальное уравнение (3.21):
a2p2y(t) + a1py(t) + a0y(t) = b1px(t) + b0x(t) (3.23)
или
(a2p2 + a1p + a0)y(t) = (b1p + b0)x(t). (3.24)
Введем понятие операторов:
A(p)=a2p2+a1p+a0, (3.25)
B(p)=b1p+b0. (3.26)
Сделаем подстановку выражений (3.24) и (3.25) в уравнение (3.23):
A(p)y(t)=B(p)x(t) – (3.27)
это запись дифференциального уравнения (3.21) в операторной форме.
Передаточная функция в операторной форме
 (3.28)
(3.28)
Тогда дифференциальное уравнение (3.21) можно записать в виде:
y(t) = W(p)x(t). (3.29)
Передаточные функции W(s) и W(p) могут служить достоверным математическим описанием физической системы только при нулевых начальных условиях.
Для стационарных систем передаточные функции в форме изображения Лапласа W(s) и в операторной форме W(p) совпадают. На этом основании при рассмотрении линейных стационарных систем будем оперировать обобщенным термином «передаточная функция W(p)», полагая, что p – комплексная переменная.
Значение переменной p, при котором функция W(p) обращается в нуль, называется нулем передаточной функции. Значение p, при котором функция W(p) обращается в бесконечность, называется полюсом передаточной функции.
Если приравнять к нулю полином числителя передаточной функции W(p):
 , (3.30)
, (3.30)
то корни уравнения (3.30) будут являться нулями W(p).
Если приравнять к нулю полином знаменателя передаточной функции системы W(p):
 , (3.31)
, (3.31)
то корни уравнения (3.31) будут являться п олюсами W(p).
По расположению нулей и полюсов на комплексной плоскости делают вывод о свойствах исследуемой системы (качестве переходного процесса, устойчивости и др.)
Передаточная функция является самой компактной математической моделью, описывающей динамические свойства системы, и дает исчерпывающую характеристику взаимосвязи – «вход – выход».
Элементарные типовые звенья физических систем
Исследуемая физическая система может быть представлена в виде совокупности элементарных типовых звеньев. Этот прием лежит в основе разработки и анализа устройств и систем управления.
Элементарные типовые звенья могут рассматриваться в качестве моделей реальных функциональных элементов различной физической природы, разных принципов действия и конструктивного выполнения, но имеющих сходное математическое описание взаимосвязи «вход –выход».
Рассмотрим некоторые элементарные типовые звенья.
 Пропорциональное (усилительное) звено. Передаточная функция W(p) = k.
Пропорциональное (усилительное) звено. Передаточная функция W(p) = k.
Уравнение, связывающее мгновенные значения входной и выходной величин: y(t) = kx(t).
Реакция звена y(t) на единичное ступенчатое воздействие x(t) показана на рис. 3.3.
 |
 Примеры функциональных элементов, моделируемых пропорциональным (усилительным) звеном: электронный усилитель, работающий на линейном участке характеристики в режиме малого сигнала (рис. 3.4), редуктор (рис. 3.5).
Примеры функциональных элементов, моделируемых пропорциональным (усилительным) звеном: электронный усилитель, работающий на линейном участке характеристики в режиме малого сигнала (рис. 3.4), редуктор (рис. 3.5).
Инерционное (апериодическое) звено. Передаточная функция:
где k – передаточный коэффициент;
 |
Т – постоянная времени, характеризующая инерционные свойства звена.
 Реакция инерционного (апериодического) звена на единичное ступенчатое воздействие показана на рис. 3.6.
Реакция инерционного (апериодического) звена на единичное ступенчатое воздействие показана на рис. 3.6.
Примеры функциональных элементов, моделируемых инерционным (апериодическим) звеном: электрический пассивный четырехполюсник (рис. 3.7), электрическая цепь (рис. 3.8), электрический генератор постоянного тока (рис. 3.9).