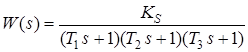
Параметром, характеризующим быстродействие рассматриваемых объектов, является суммарная постоянная времени  . Этот параметр был введен многими авторами в начале 1960-х годов. Для системы с передаточной функцией:
. Этот параметр был введен многими авторами в начале 1960-х годов. Для системы с передаточной функцией:

суммарная постоянная времени:
 .
.
Величина  может быть получена и непосредственно из ответной реакции на ступенчатый входной сигнал системы. Для этого на кривой переходного процесса выбирают две точки с координатами
может быть получена и непосредственно из ответной реакции на ступенчатый входной сигнал системы. Для этого на кривой переходного процесса выбирают две точки с координатами  и
и  (желательно в начале и в конце спрямленного участка, в центре которого находится точка перегиба). Далее вычисляют величины
(желательно в начале и в конце спрямленного участка, в центре которого находится точка перегиба). Далее вычисляют величины  и
и  по следующим формулам:
по следующим формулам:
 ,
,
 ,
,
где  или 2.
или 2.
Суммарная постоянная времени равна:
 .
.
Метод основан на аппроксимации объекта звеном третьего порядка вида:
 ,
,
где  .
.
Затем  и
и  выбирают таким образом, чтобы компенсировать два полюса. Приведем вывод формул для и .
выбирают таким образом, чтобы компенсировать два полюса. Приведем вывод формул для и .
Передаточная функция прямого канала системы имеет вид:
 ,
,
 .
.
Для компенсации двух полюсов необходимо соблюдение равенства:
 .
.
Откуда
 , (9)
, (9)
 . (10)
. (10)
После компенсации двух полюсов передаточная функция замкнутой системы примет вид:
 . (11)
. (11)
Коэффициент  выбирают таким, чтобы коэффициент демпфирования контура был равен
выбирают таким, чтобы коэффициент демпфирования контура был равен  . По мнению специалистов, такой коэффициент демпфирования дает оптимальную динамику системы в отношении времени переходного процесса и перерегулирования. После подстановки (9) и (10) в (11) получим формулу:
. По мнению специалистов, такой коэффициент демпфирования дает оптимальную динамику системы в отношении времени переходного процесса и перерегулирования. После подстановки (9) и (10) в (11) получим формулу:  .
.
Благодаря оптимизации по интегральной оценке качества регулирования, представляется возможность настройки регулятора для модели объекта второго порядка еще лучше, т.е. с большим быстродействием (табл. 1). Эти параметры дают хорошие результаты для объектов регулирования с моделью первого или второго порядка. Но для объектов более высокого порядка наблюдается заметное перерегулирование. Поэтому быстрая настройка применима тогда, когда известно, что объект соответствует звеньям первого или второго порядка. А нормальная («медленная, осторожная») настройка, напротив, почти всегда дает хорошие результаты для звеньев объекта более высокого порядка.
Таблица 1
| Вид настройки | Тип регулятора | Параметры регулятора | ||

| 
| 
| ||
| Нормальная | П | 
| – | – |
| ПД |
| – | 
| |
| ПИ | 
| 
| – | |
| ПИД |
| 
| 
| |
| Быстрая | ПИ |
| 
| – |
| ПИД | 
| 
| 
|
Метод настройки Шеделя
Метод основан на принципе каскадного коэффициента демпфирования. Шедель обобщает понятие коэффициента демпфирования на случай системы третьего порядка. Здесь для системы с передаточной функцией вида:

справедливы следующие выражения:
 ,
,  .
.
Коэффициенты ПИД-регулятора настраивают так, чтобы коэффициенты демпфирования системы были равны  ,
,  .
.
В случае объекта вида:

совершается переход к следующей форме:
 , (12)
, (12)
где
 ,
,  ,
,  . (13)
. (13)
Параметры ПИД-регулятора рассчитываются по следующим формулам:
 ,
,  и
и  . (14)
. (14)
Метод Шеделя сокращает время переходного процесса, незначительно увеличивая перерегулирования (менее 10%).