Занятие 9
Аналитическая механика есть раздел теоретической механики, который дает общие методы решения задач статики и динамики, основанные на применении возможных или виртуальных перемещений.
Для решения задач статики используется принцип виртуальных перемещений или общее уравнение статики.
Возможными или виртуальными перемещениями называются такие мыслимые, бесконечно малые перемещения, которые допускаются связями, наложенными на механическую систему, в данный момент времени.
Мыслимые – это любые перемещения, которые можно представить при условии, что они допускаются наложенными связями
Бесконечно малые – настолько малые, что можно пренебречь происходящими при них изменениями координат
Допускаются связями – зависят только от наложенных связей, но не от приложенных сил и начальных скоростей
В данный момент времени – виртуальные перемещения определяются конфигурацией связей, сложившейся к данному моменту времени
Для вывода уравнений равновесия с помощью принципа виртуальных перемещений используются кинематические соотношения между виртуальными перемещениями. Так как виртуальные перемещения являются бесконечно малыми, они соотносятся друг с другом также как и виртуальные скорости, т.е. те скорости, которые получили точки и тела в механической системе, если она начала бы совершать одно из возможных движений.
При решении задач и выполнении расчетно-графической работы Д-14 движения различных тел в механических системах и механизма происходят в одной плоскости. В этом случае для нахождения соотношений между виртуальными перемещениями следует знать, как они распределены при трех простейших видах движения твердого тела.
При поступательном движении твердого тела (как и при мгновенном поступательном) виртуальные перемещения всех точек одинаковы, как по величине, так и по направлению
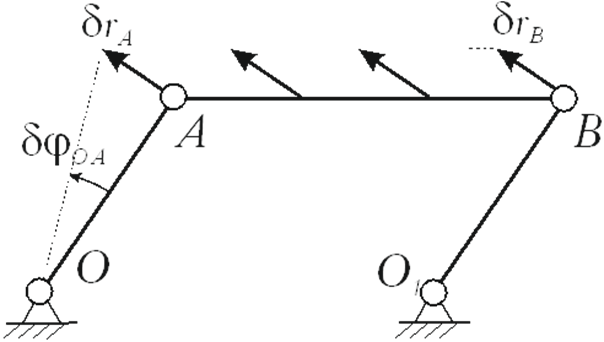
При вращении тела вокруг неподвижной оси виртуальные перемещения пропорциональны расстояниям от точек до оси вращения и направлены перпендикулярно отрезкам, соединяющим эти точки и ось вращения

Если какое-либо тело совершает плоско-параллельное движение, то для определения соотношений между виртуальными перемещениями можно воспользоваться тем, что в каждый данный момент времени плоско-параллельное движение можно рассматривать как мгновенный поворот вокруг мгновенного центра скоростей. Следовательно, при таком движении виртуальные перемещения пропорциональны расстояниям от точек до мгновенного центра скоростей и направлены перпендикулярно отрезкам, соединяющим эти точки и мгновенный центр скоростей.
Принцип виртуальных перемещений определяет условия равновесия механической системы, на которую наложены идеальные связи: Для того, чтобы механическая система, на которую наложены идеальные, стационарные и удерживающие связи, находилась в равновесии, необходимо и достаточно, чтобы сумма виртуальных работ всех активных сил на любом из виртуальных перемещений системы была равна нулю.
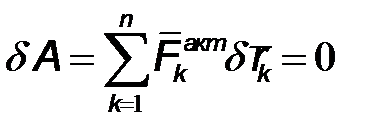
Записанное уравнение называется уравнением работ принципа виртуальных перемещений.
Если в механической системе есть неидеальные связи, то силы трения можно отнести к активным силам, сделав тем самым связи идеальными.
Если система имеет одну степень свободы, то для составления уравнения работ следует:
· Дать возможное перемещение одной из точек системы. Это либо точка, где приложена неизвестная сила, либо точка, через перемещение которой удобно выразить все остальные перемещения.
· Выразить виртуальные перемещения точек приложения активных сил через выбранное.
· Составить уравнение работ и найти искомую величину.
Если система имеет несколько степеней свободы, то сначала следует определить число степеней свободы, затем выбрать независимые виртуальные перемещения, число которых должно быть равно числу степеней свободы. Дальнейшее решение можно проводить двумя способами.
Первый способ.
· Виртуальные перемещения точек приложения активных сил выражаются через выбранные независимые виртуальные перемещения.
· Составляется уравнение работ, в котором присутствуют все независимые виртуальные перемещения.
· Группируются слагаемые с каждым независимым виртуальным перемещением.
· Так как выбранные виртульные пемещения являются независимыми, то сумма в уравнении работ принципа виртуальных перемещений может быть равна нулю только в том случае, если коэффиценты у каждого из выбранных перемещений будут равны нулю.
· Решается полученная система уравнений, из которой можно найти незвестные величины, число которых равно числу степеней свободы рассматриваемой механической системы.
Второй способ.
· Выбирается одно из независимых перемещений, все остальные приравниваются нулю.
· Виртуальные перемещения точек приложения активных сил выражаются через выбранное.
· Составляется уравнение работ, число неизвестных в котором может быть равно числу степеней свободы.
· Повторяя все действия с каждым из независимых перемещений, получим систему уравнений, число которых будет равно числу степеней свободы рассматриваемой системы.
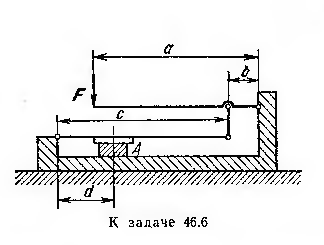
46.6(46.6). Определить модуль силы Q, сжимающей образец A, в рычажном прессе, изображенном на рисунке. Дано: F = 100 Н, a = 60 см,
b = 10 см, c = 60 см, d = 20 см.
Ответ: Q = 1800 Н.
Решение
Рассматриваемый в задаче пресс имеет одну степень свободы. Выберем за главное виртуальное перемещение точки, в которой приложена сила F. Обозначим концы вертикального стержня B и C.
Горизонтальные рычаги вращаются вокруг неподвижных осей, следовательно, перемещения различных их точек будут пропорциональны расстояниям от точек до осей вращения.

Вертикальный стержень совершает плоско-параллельное движение, но в данном положении виртуальные перемещения точек B и C параллельны друг другу, следовательно, мгновенный центр скоростей будет находиться в бесконечности, а виртуальные перемещения этих точек будут равны.

Пользуясь записанными соотношениями выразим через  виртуальное перемещение точки A, в которой приложена сила Q.
виртуальное перемещение точки A, в которой приложена сила Q.
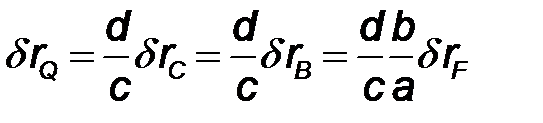
Составим уравнение работ принципа виртуальных перемещений

Отсюда находим силу Q

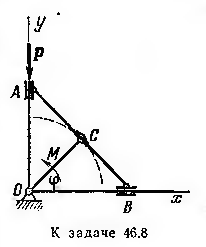
46.8(46.8). К ползуну A механизма эллипсографа приложениа сила P, направленная вдоль направляющей ползуна к оси вращения O кривошипа OC. Какой вращающий момент надо приложить к кривошипу OC для того, чтобы механизм был в равновесии, когда кривошип OC образует с направляющей ползуна угол j? Механизм расположен в горизонтальной плоскости, причем OC = AC = CB =l.
Ответ: M = 2Pl cos j.
Решение
Механизм эллипсографа имеет одну степень свободы. Выберем за главное перемещение виртуальный угол поворота dj кривошипа OC, к которому приложен вращающий момент M. Направление этого поворота может быть любым. Пусть оно совпадает с направлением момента.
Кривошип OC вращается вокруг неподвижной оси, поэтому виртуальные перемещения всех его точек, направлены перпендикулярно кривошипу, а по величине пропорциональны расстоянию от точек до оси вращения.

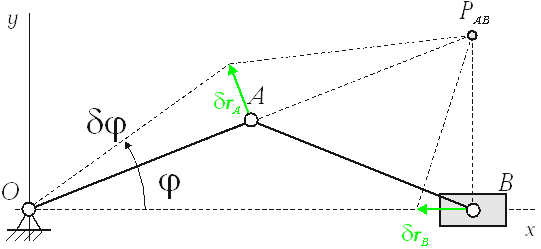
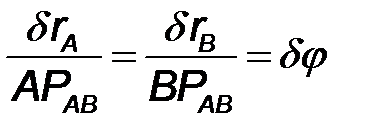
Движение стерженя AB – плоско-параллельное. Для того, чтобы найти соотношение между виртуальными перемещениями, надо найти положение мгновенного центра скоростей этого стержня. Воспользуемся тем, что у виртуальных скоростей такое направление, что и у скоростей. Мгновенный центр скоростей стержня AB лежит на пересечении перпендикуляров к виртуальным перемещениям точек A и B. Тогда для виртуальных перемещений точек этого стержня можно будет записать
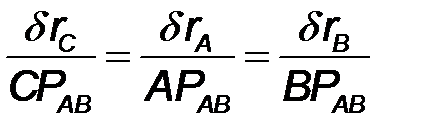 .
.
Но так как OAP AB B – прямоугольник, то

Пользуясь этими соотношениями, можно выразить d r A через dj
 .
.
Составим уравнение работ

Отсюда получаем требуемое соотношение
 .
.
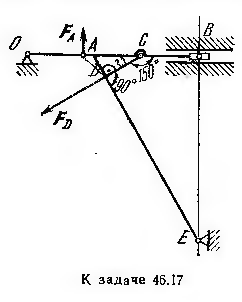
46.17(46.14). Кривошипно-ползунный механизм OAB связан в середине шатуна AB цилиндрическим шарниром C со стержнем CD. Стержни CD и DE соединены цилиндрическим шарниром D. Определить зависимость между модулями сил F A и F D, соответственно перпендикулярных стержням OA и DE, при равновесии механизма в положении, указанном на рисунке. Дано: 
Ответ: F D = 4 F A.
Решение
Рассматриваемый механизм имеет одну степень свободы. Выберем за главное виртуальное перемещение d r A точки A кривошипа. Направление этого перемещения может быть любым. Пусть оно совпадает с направлением силы F A.
Шатун AB совершает плоско-параллельное движение. Его мгновенный центр скоростей лежит на пересечении перпендикуляров к виртуальным перемещениям точек A и B – в точке B (ползун B находится в верхней мертвой точке). Тогда для виртуальные перемещения точек шатуна будут перпендикулярны ему, причем
Стержень CD также совершает плоско-параллельное движение. Его мгновенный центр скоростей P CD лежит на пересечении перпендикуляров к виртуальным перемещениям точек C и D. Из рисунка видно, что

Запишем уравнение работ принципа виртуальных перемещений

Следовательно,  .
.
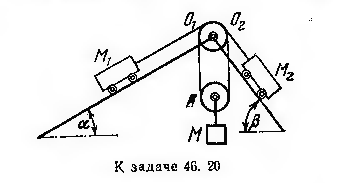
46.20(46.17). Найти массы M 1 и M 2 двух грузов, удерживаемых в равновесии грузом массы M на плоскостях, наклоненных к горизонту под углами a и b, если грузы массами M 1 и M 2 прикреплены к концам троса, идущего от груза массой M 1 через блок O 1, насаженный на горизонтальную ось, к подвижному блоку O, и затем через блок O 2, насаженный на ось блока O 1, к грузу массы M 2. Блоки O 1 и O 2 – соосные. Трением, а также массами блоков и троса пренебречь.
Ответ: 
Решение
Механическая система, состоящая из трех грузов, связанных между собой тросом, имеет две степени свободы.
Составить уравнение работ принципа виртуальных перемещений в такой системе можно двумя способами.
Первый способ – Учитываем все независимые виртуальные перемещения.
Выберем в качестве независимых виртуальных перемещений перемещения грузов M 1 и M 2 вдоль наклонной плоскости. Для определенности направим их вниз. Виртуальное перемещение груза M будет равно полусумме d r 1 и d r 2. К числу активных сил в этой задаче относятся только три силы тяжести, поэтому уравнение работ принципа виртуальных перемещений будет таким

Сгруппируем слагаемые при каждом из виртуальных перемещений

Так как виртуальные перемещения d r 1 и d r 2 не зависят друг от друга, то записанная сумма будет равна нулю на любом из виртуальных перемещений механической системы только в том случае, если будут равны нулю коэффициенты у виртуальных перемещений. В результате получаем систему из двух уравнений с двумя неизвестными, из которой находим искомые значения

Второй способ – Пользуемся тем, что все выбранные главные виртуальные перемещения не зависят друг от друга, и рассматриваем такие возможные движения, при которых все виртуальные перемещения кроме одного будут равны нулю.
Рассмотрим такое возможное движение, при котором перемещается только груз M 1, а груз M 2 остается в покое. Тогда  и
и  .
.
Уравнение работ в этом случае
 .
.
Из него получаем  .
.
Второе уравнение составляется в предположении, что  .
.

Если воспользоваться аксиомой освобождаемости от связей, то принцип виртуальных перемещений можно применять для определения реакций связей. В таком случае можно воспользоваться независимостью виртуальных перемещений отброшенных связей и заменять связи так, чтобы появлялась только одна реакция.
Рекомендуемые задачи: 46.3, 46.11, 46.19