1.1. Характеристики, параметры и конкретные значения параметров технологического барьера выбираются исходя из положений дорожной карты направления AutoNet Национальной технологической инициативы.
1.2. В рамках конкурса ставится задача разработки Беспилотного транспортного средства автомобильного типа, предназначенного для решения задач индивидуальных пассажирских или грузовых перевозок в пределах границ населенных пунктов с преобладающей малоэтажной застройкой и относительно низкой плотностью дорожного движения.
1.3. Для определения фактических параметров технологического барьера в условиях близких к реальной эксплуатации, в качестве опорной схемы движения выбрана схема проведения испытаний на топливную экономичность ARDC, подготовленную экспертами НАМИ и издания “Авторевю” на основе статистических данных по типовому движению водителей при реальной эксплуатации в городских условиях.
1.4. Одной из типовых задач, на которых применение беспилотных транспортных средств автомобильного типа в ближайшей перспективе является целесообразным ‑ это перемещение от одного до пяти пассажиров с индивидуальным багажом от транспортного-пересадочного узла к месту проживания или работы и обратно. В рамках конкурса длина типового маршрута, сопоставленного указанной типовой задаче составляет от 1,5 до 5 км.
1.5. Для обеспечения условий для достоверного определения надежности и повторяемости работы разработанной системы управления общая длина зачётного маршрута предлагается установить равной 50 км.
1.6. Учитывая территориальные и климатические особенности России оценочные испытания должны включать в себя корректное отображение условий окружающей среды, в которых предполагается применение Беспилотного транспортного средства. В том числе учет различной освещенности, изменения температуры, наличию осадков и тому подобное. Разумным является выбор в качестве целевых условий тех, которые характерны для осенне-зимнего периода в средней полосе России.
Для обоснования режимов движения, длин участков используется метод ARDC.
2. Метод ARDC
2.1. Autoreview Driving Cycle (ARDC, Ездовой цикл Авторевю) - методика анализа реальной топливной экономичности легковых автомобилей, разработанная экспертами НАМИ и автомобильного издания “Авторевю” для проведения сравнительных испытаний автомобилей в стандартизованных условиях, максимально приближенных к реальным условиям эксплуатации.
В отличие от сертификационных методик оценки топливной экономичности, таких как СТП 37.052.027-81 в СССР, “Новый европейский ездовой цикл” (NEDC), описанный в Правиле ECE R101, “Стандарт FTP 75” в США, JC08 в Японии, методика ARCD не ставит целью сертификацию автомобилей, поэтому в ее основу заложены результаты статистического анализа эксплуатации автомобилей рядовыми сотрудниками редакции в городских условиях.
2.2. Результаты статистического анализа по режимам эксплуатации
2.2.1. 40% от общего времени, автомобили движутся без существенных ускорений и замедлений - скорость изменяется в пределах 5 км/ч.
2.2.2. Распределение по скоростям (средним) имеет следующий вид (от доли пробега):
- 9% - “пробочное движение”;
- 17% со скоростью от 30 до 50 км/ч;
- 45% со скоростью от 50 до 70 км/ч;
- 23% со скоростью от 70 до 90 км/ч;
- 6% со скоростью выше 90 км/ч.
Набор скорости выполняется в следующем режиме:
- от 0 до 20 км/ч среднее ускорение равно 1,51 м/с2;
от 20 до 80 км/ч среднее ускорение равно 0,93 м/с2.
Рекомендованные дистанции замедления до полной остановки:
- 60 м со скорости 40 км/ч;
- 90 м со скорости 60 км/ч;
- 125 м со скорости 80 км/ч;
- 150 м со скорости 100 км/ч.
2.2.3. Среднее расстояние, преодолеваемое за одну поездку составляет 21,35 км.
2.2.4. Количество остановок продолжительностью более трех секунд (за одну поездку) - 9, при средней продолжительности 27,4 секунды.
2.3. Параметры ездового цикла ARDC
2.3.1. Длина кольцевого маршрута равна 61,83 км (три круга по 20,61 км) - определена конфигурацией Дмитровского полигона.
2.3.2. Распределение дистанции по режимам движения:
- 18,3 % - равномерное со скоростью 40 км/ч;
- 41,9 % - равномерное со скоростью 60 км/ч;
- 22,3 % - равномерное со скоростью 80 км/ч;
- 9,7 % - интенсивный разгон до 100 км/ч (по два на круг);
- 7,8% - “пробочное” движение.
2.3.3. Движение в заторах (пробочное) моделируется повторяющимися разгонами до 20-25 км/ч с последующими остановками. Разгоны разделяются на “ритмичные” ‑ расстояние между остановками постоянно ‑ 40 м, и на “неритмичные” ‑ с дистанцией от 25 до 55 м. Общее время, затрачиваемое на прохождение данного испытания, как правило не зависит от возможностей автомобиля и составляет 20% времени от всего времени проезда одного круга ездового цикла ARDC.
2.3.4. На участках с “равномерным” движением и интенсивным разгоном 30 остановок (за один круг), причём 12 с длительностью 30 секунд. На участках с “пробочным движением” выполняется по 42 цикла разгон-остановка.
2.3.5. Телеметрия выполнения одного круга ездового цикла ARDC приведена на рисунке 1.

Рисунок 1. Пример телеметрии одного круга ARDC для автомобиля Chevrolet Niva
2.3.6. Прохождение ездового цикла ARDC выполняется водителем с использованием легенды, представленной в виде размеченной аудиозаписи с указаниями по выполняемым действиям. Также на маршруте выставляются визуальные метки для корректного определения дистанций отрезков при движении. Примерное время прохождения одного круга (20,61 км) составляет 38 минут (средняя скорость 32,5 км/ч).
3. Рекомендации по адаптации ездового цикла ARDC для испытаний БПТС
3.1. В отличии от методики ARDC, направленной на оценку расхода топлива в реальных режимах эксплуатации, испытания в рамках Конкурса направлены на доказательство возможности системы управления БПТС обеспечить схожие характеристики транспортировки пассажиров, но с учетом обеспечения соблюдения всех правил ПДД РФ и безопасности эксплуатации БПТС, и, в том числе, испытательного полигона.
3.2. Исходя из схемы движения полигона, требований безопасности и “достаточности” для движения в городских условиях принимается скорость 40 км/ч на “скоростных” участках зачетного маршрута. При необходимости и при наличии конструктивных возможностей БПТС могут превышать эту скорость в пределах ограничений, установленных дорожными знаками, либо другими требованиями к данному участку дороги. Введение указанного ограничения увеличивает время прохождения круга в цикле ARDC приблизительно до 46 минут (средняя скорость ‑ 27 км/ч).
3.3. С целью избежания подготовки специализированных алгоритмов для искусственной симуляции “пробочного” движения и интеграции её каждому участнику, необходимо будет применить инфраструктуру обеспечивающую побочное окружения БПТС: установка управляемых светофоров с заданным шагом; установка знака 2.5 Движение без остановки запрещено; учёт конфигурации полигона и выдача маршрутов таким образом, чтобы БПТС было вынуждено часто останавливаться при совершении маневров.
3.4. В целях упрощения логистики и организации подготовки полигона для контроля разных режимов движения БПТС рекомендуется выделить три отдельных испытания, объединенных общим зачетом:
- движение на протяженных прямолинейных участках городских улиц;
- движение в режиме чередования циклов разгонов и остановок (“пробочное” движение);
- движение в условиях следования по маршруту между жилыми массивами (микрорайонами).
4. Параметры оценочного цикла
4.1. В рамках номинации испытания проводятся в рамках трех основных сценариев:
4.1.1. Движение на протяженных прямолинейных участках городских улиц со скоростью потока - не ниже 40 км/ч.
4.1.2. Движение в режиме чередования циклов разгонов и остановок, характерных при маневрировании в жилом массиве либо при “пробочном” характере движения.
4.1.3. Движение в условиях следования по маршруту между жилыми массивами (микрорайонами) с преодолением перекрестков, дорожных развязок, с учётом дорожных знаков и требований дорожной разметки.
4.2. Коррекция параметров ездового цикла ARDC с учетом оценивания систем управления БПТС
4.2.1. В отличие от испытаний по ездовому циклу ARDC, когда автомобилем управляет профессиональный водитель и априори полагается, что он не допускает ошибок в оценке дорожной ситуации и управлении автомобилем, в случае БПТС управление выполняет роботизированная система управления. Ключевым фактором в оценке эффективности роботизированной системы управления является корректное выполнение операций двух типов:
- распознавание окружающей обстановки, в том числе дорожной разметки, знаков, светофоров, препятствий и участников дорожного движения;
- непосредственное управление транспортным средством для осуществления движения по маршруту с соблюдением ПДД РФ.
4.2.2. В зависимости от сценария движения, меняется роль различных факторов, оказывающих влияние на выполнение указанных операций. В связи с достигнутым на данный момент технологическим уровнем, решение ряда задач может считаться типовым (по уровню сложности) и потребность в контроле может быть признана низкой или несущественной.
4.2.3. В сценарии движения по протяженным прямолинейным участкам городских улиц со скоростью не ниже 40 км/ч на текущем технологическом уровне, демонстрируемом крупными компаниями-разработчиками БПТС, операция распознавания окружающей обстановки в большинстве ситуаций, за исключением экстремальных погодных условий, может считаться типовой. Для базовой гипотезы “нет препятствий и движение возможно на максимально допустимой скорости”, число ошибок первого рода (с учетом характера прямолинейных участков, строящихся как раз для уменьшения количества препятствий движению) должно быть невелико, равно как число ошибок второго рода, приводящих к снижению скорости движения БПТС без фактической необходимости (Рисунок 2).
4.2.4. Корректность реализации операции управления транспортным средством статистически достоверно может быть проверена на небольшом участке маршрута путём трех-четырехкратного преодоления контрольного участка с некоторым количеством разгонов и торможений.
4.2.5. Рекомендуемая длина контрольного участка (с учетом рекомендованных характеристик разгонов и торможений) составляет 1 км. Таким образом, дистанция в 10 км (5 циклов проезда в обе стороны) может считаться достаточной для подтверждения функционирования системы управления БПТС в текущих условиях (погода и освещенность).
С учетом дневного и ночного режимов общая длина данного участка зачётного маршрута равна 20 км. Суммарное контрольное время (оценочно) - 40 минут (из них 10 минут на маневрирование и разгоны и торможения).
После коррекции схемы движения ездового цикла ARDC с пропорциональным указанному выше сокращением участков скоростного движения, средняя скорость на прохождения ездового цикла составит 26,2 км/ч.[1]

Рисунок 2. Схема участка полигона, имитирующая протяженный прямолинейный участок городских улиц
4.2.6. В сценарии “пробочного движения” основным требованием является корректное определение дистанции, позиционирование и точное выполнение маневров. Важную роль в успешном прохождении данного сценария играет подсистема построения карты проходимости (или её аналог), позволяющей реализовать функции интеллектуального круиз-контроля и алгоритмы уточнения навигационных данных по результатам анализа окружения БПТС. Многократные разгоны и торможения при интенсивном маневрировании приведут к возникновению большого числа ошибок первого рода в системе навигации, когда информация об окружающих объектах будет трактоваться неверно.
4.2.7. Для обеспечения сопоставимости результатов БПТС и данных реальных водителей (с учетом модельного характера ARDC), рекомендуется сохранение доли и характера движения в “пробочном” режиме. Пропорциональный пересчёт параметров ездового цикла ARDC на общую длину зачётного маршрута предписывает реализовать “пробочный” сценарий на дистанции 4 км, с обеспечением 100 циклов разгон-торможение. В рамках данного сценария разумно проверить способность БПТС корректно отрабатывать ситуации скользкой и сильно загрязненной дороги, а также наличия на дороге малоразмерных препятствий[2] [3].
4.2.8. В соответствии со статистическими данными по прохождению испытателями зачётной дистанции ездового цикла ARDC - средняя скорость движения на данном участке маршрута (сценарии) должна составлять около 6,7 км/ч.
4.2.9. Сценарий движения в условиях следования по маршруту характеризуется высоким разнообразием задач, которые должна будет решать система управления. Это в том числе задачи позиционирования, расположения на дороге, следование предписаниям дорожных знаков, распознавание светофорных сигналов, определение участников дорожного движения. В связи с важностью данного сценария предлагается увеличить его долю в зачётном маршруте до 26 км (52% общей длины). Средняя скорость движения автотранспорта в городских условиях составляет, как правило, 20 – 22 км/ч.
4.3. С целью упрощения логистики оценивания выполнения разных сценариев, в том числе в условиях разной освещенности, и обеспечения равных условий участникам конкурса, дистанция зачётного маршрута разбивается на несколько частей, преодоление которых может проводиться в разное время и на разных участках испытательного полигона.
4.4. Основной (базовой) характеристикой, используемой при оценивании, является средняя скорость движения, подразумевающая преодоление некоего типового маршрута за заданное нормативом время. С целью снижения случайных факторов, влияющих на результат оценивания, общая длина зачётного маршрута установлена кратно превосходящей типовой маршрут БПТС в обозначенной задаче.
4.4.1. Средняя скорость движения при прохождении скорректированного указанным образом цикла ARDC составит 26 км/ч. Это условная характеристика для “усредненного водителя” при повседневных поездках на дорогах со средним трафиком.
4.4.2. Методика ездового цикла предполагает, что все существенные изменения направления движения тестируемого автомобиля синхронизированы с участками существенного замедления или остановки, отмеченные на телеметрии прохождения зачётного круга. В соответствии с этим положением, в сценарии “следование по маршруту” (с учетом предполагаемого разгона ТС до скоростей 40 км/ч) отрезки траектории движения между крутыми поворотами и участками вынужденного снижения скорости (“лежачие полицейские”, перекрестки, пешеходные переходы) должны быть порядка 100 м.
На схеме полигона для испытаний беспилотного транспорта НАМИ только один участок соответствует данным требованиям. Остальные участки, которые могут быть использованы для формирования маршрутов имеют длину от 40 до 60 м (см. рисунок 3). С учетом переходных процессов и необходимости движения по дугам поворотов с низкой скорость, коэффициент снижение средней скорости на маршруте (в зависимости от выбранной последовательности проезда перекрестков) составляет 0,5 - 0,7. Схожее влияние характер полигона оказывает на сценарий “пробочного движения”, если его реализация будет проводиться на “медленной” части полигона. Доля движения с низкой скоростью возрастет на 10%-20%, в связи с необходимостью проезда перекрестков и поворотов.
Таким образом, “оптимистический” коэффициент сложности полигона в смысле снижения общей средней скорости прохождения ездового цикла может быть принят за 0,7, с учетом того, что сценарий “движения по маршруту” занимает более половины всего времени всего испытания.
Схема полигона совмещенная с аэрофотоснимком и масштабной линейкой приведена на рисунке 3.
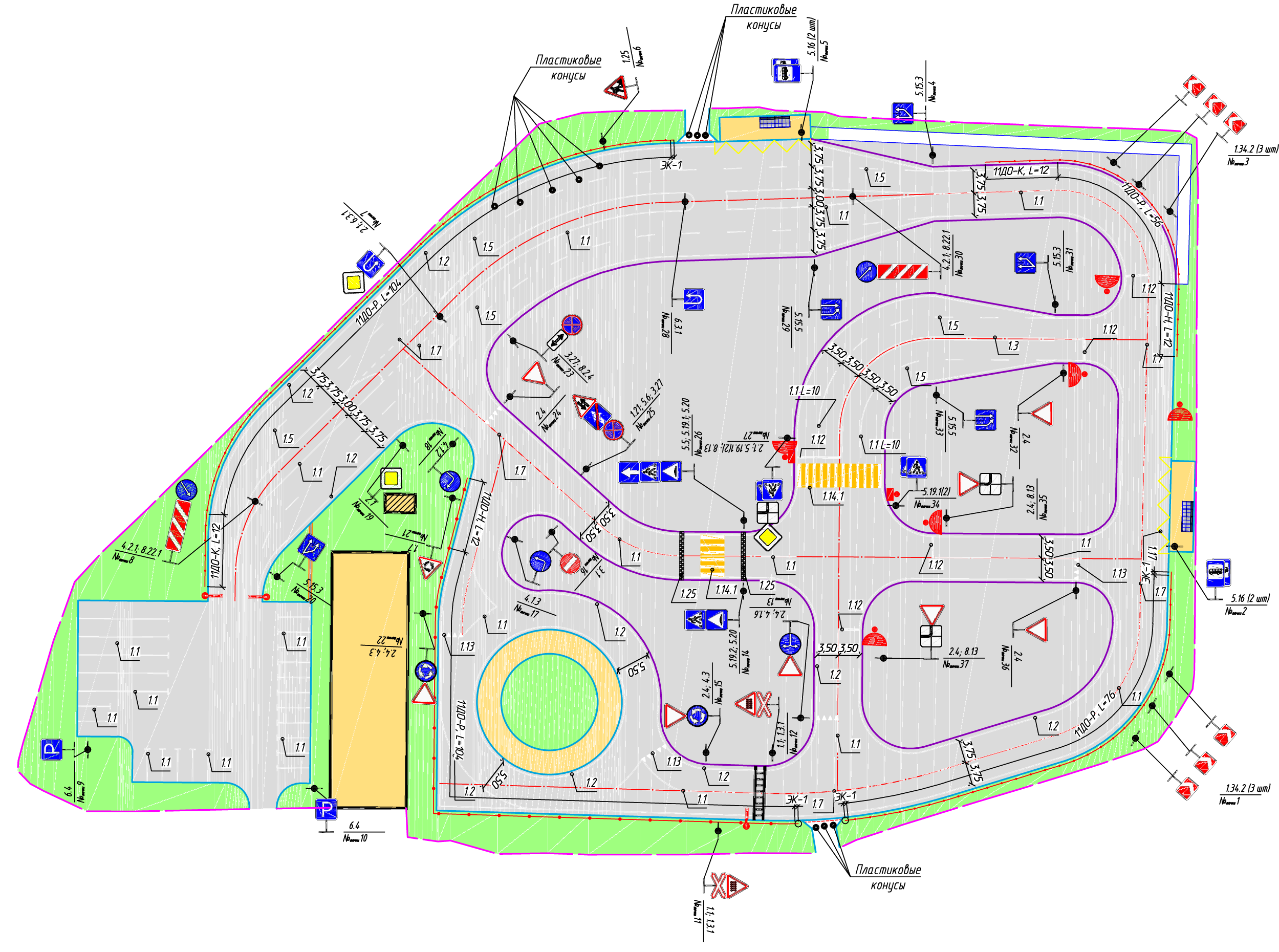
Рисунок 3. Схема полигона НАМИ для беспилотного транспорта, совмещенная с аэрофотоснимком и масштабными линейками
4.4.3. С учетом введенного в п. 4.4.2 коэффициента сложности полигона – 0,7 (от средней скорости скорректированного ездового цикла ARDC), максимальная длительность временного интервала, отведенного на преодоление зачётного маршрута можно установить равной – 3 часа при со средней скорости 18 км/ч.[4] [5]
4.5. Сводная схема ездового цикла (зачётного маршрута), включающего в себя испытания по всем трем сценариям приведена на рисунке 4.

Рисунок 4. Схема ездового цикла оценивания системы управления БПТС конкурса “Зимний город”
Здесь первым идёт сценарий “пробочного движения”, затем “скоростной участок”, а завершает блок испытание “движение по маршруту”. Интервалы с нулевой скоростью – резерв для решения технических проблем, либо для компенсации штрафов.