Интерфейс предназначен для подключения сложных цифровых микросхем или устройств уровня печатной платы к стандартной аппаратуре тестирования и отладки.
На текущий момент интерфейс стал промышленным стандартом. Практически все сколько-нибудь сложные цифровые микросхемы оснащаются этим интерфейсом для:
выходного контроля микросхем при производстве
тестирования собранных печатных плат
прошивки микросхем с памятью
отладочных работ при проектировании аппаратуры и программного обеспечения
Метод тестирования, реализованный в стандарте, получил название Boundary Scan (граничное сканирование). Название отражает первоначальную идею процесса: в микросхеме выделяются функциональные блоки, входы которых можно отсоединить от остальной схемы, подать заданные комбинации сигналов и оценить состояние выходов каждого блока. Весь процесс производится специальными командами по интерфейсу JTAG, при этом никакого физического вмешательства не требуется. Разработан стандартный язык управления данным процессом — Boundary Scan Description Language (BSDL).
Стандарт предусматривает возможность подключения большого количества устройств (микросхем) через один физический порт (разъем).
Порт тестирования (TAP — Test Access Port) представляет собой четыре или пять выделенных выводов микросхемы: ТСК, TMS, TDI, TDO и (опционально) TRST.
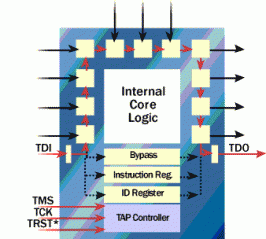
JTAG-порт микросхемы и ячейки периферийного сканирования.
Функциональное назначение этих линий:
TDI (test data input — «вход тестовых данных») — вход последовательных данных периферийного сканирования. Команды и данные вводятся в микросхему с этого вывода по переднему фронту сигнала TCK;
TDO (test data output — «выход тестовых данных») — выход последовательных данных. Команды и данные выводятся из микросхемы с этого вывода по заднему фронту сигнала TCK;
TCK (test clock — «тестовое тактирование») — тактирует работу встроенного автомата управления периферийным сканированием. Максимальная частота сканирования периферийных ячеек зависит от используемой аппаратной части и на данный момент ограничена 25…40 МГц[ источник не указан 2438 дней ];
TMS (test mode select — «выбор режима тестирования») — обеспечивает переход схемы в/из режима тестирования и переключение между разными режимами тестирования.
В некоторых случаях к перечисленным сигналам добавляется сигнал TRST для инициализации порта тестирования, что необязательно, так как инициализации
https://fb.ru/article/216339/chto-takoe-jtag-programmator
- СРВ. Системы типа «основной цикл».
Малые системы небольшой сложности проектируются, в основном, как показано на рисунке 2-1. Такие системы называются системами типа "суперпетля". Приложение представляет собой бесконечный цикл, в котором для выполнения требуемых задач (на заднем плане, также называемом уровнем задач) вызываются необходимые модули (то есть функции). Асинхронные события обрабатываются при помощи подпрограмм обработки прерываний, ISR (на переднем плане, также называемом уровнем прерываний). Критичные операции должны выполняться в ISR, чтобы иметь гарантированное время выполнения. Из-за этого ISR имеют тенденцию становиться длиннее, чем должны быть. Также, информация для фоновых задач, становящаяся доступной в результате работы ISR, не может быть обработана, пока не закончится текущий оборот бесконечного цикла выполнения приложения. Это называется откликом уровня задач. Худший случай для времени отклика уровня задач зависит от того, насколько быстро выполняется этот бесконечный цикл. Так как время выполнения кода обычно не постоянно, то время успешного выполнения одного оборота суперпетли ничем не определено, не детерминировано. Более того, если код модифицируется, это тоже оказывает влияние на величину отклика уровня задач.

- СРВ. Системы жесткого реального времени.
Системы жёсткого и мягкого реального времени
Системы реального времени бывают двух типов — системы жесткого реального времени и системы мягкогореального времени.[5] Системы жёсткого реального времени не допускают задержек реакции системы, таккак это может привести к:
· потере актуальности результатов
· большим финансовым потерям
· авариям и катастрофам
Если не выполняется обработка критических ситуаций либо она происходит недостаточно быстро, системажёсткого реального времени прерывает операцию и блокирует её, чтобы не пострадала надёжность иготовность остальной части системы. Примерами систем жёсткого реального времени могут быть — системыуправления бортового оборудования, системы аварийной защиты, регистраторы аварийных событий.
- СРВ. Системы мягкого реального времени.
Системы мягкого реального времени характеризуются возможностью задержки реакции, что можетпривести к увеличению стоимости результатов и снижению производительности системы в целом. Примеромможет служить работа компьютерной сети.[7] Если система не успела обработать очередной принятый пакет, это приведет к остановке на передающей стороне и повторной посылке (в зависимости от протокола). Данные при этом не теряются, но производительность сети снижается.
- СРВ. Круговая диспетчеризация.
Round Robin
- СРВ. Вытесняющее ядро.
Вытесняющая многозадачность (приоритетная многозадачность, англ. preemptive multitasking, дословно упреждающая многозадачность) — это вид многозадачности, при которой операционная система принимает решение о переключении между задачами по истечении некоего кванта времени[1].
Особенности
Решение принимается в соответствии с приоритетами задач. В отличие от кооперативной многозадачности управление операционной системе передаётся вне зависимости от состояния работающих приложений, благодаря чему, в частности, зависшие (к примеру — зациклившиеся) приложения, как правило, не «подвешивают» операционную систему. За счёт регулярного переключения задач также улучшается отзывчивость системы, оперативность освобождения ресурсов системы, которые больше не используются задачей[1][2].
В реализации вытесняющая многозадачность отличается от кооперативной, в частности, тем, что требует обработки системного прерывания от аппаратного таймера[3]. По истечении кванта времени, отведённого процессу, происходит прерывание и вызывается планировщик процессов. Частота вызова планировщика критична: слишком частый его вызов будет расходовать процессорное время в пустую.
- СРВ. Ядро невытесняющего типа.
Невытесняющая многозадачность
Тип многозадачности, при котором операционная система одновременно загружает в память два или более приложений, но процессорное время предоставляется только основному приложению. Для выполнения фонового приложения оно должно быть активизировано. Подобная многозадачность может быть реализована не только в операционной системе, но и с помощью программ-переключателей задач.
Ядро невытесняющего типа Ядро невытесняющего типа подразумевает, что задача сама уступает управление процессором другой задаче. Чтобы обеспечить видимость параллельной работы задач этот процесс должен происходить достаточно часто. Невытесняющее управление также называется кооперативной многозадачностью, так как задачи взаимодействуют друг с другом в процессе разделения времени процессора. Асинхронные события всё так же обрабатываются подпрограммами обработки прерываний (ISR). Запустившаяся подпрограмма обработки прерывания может сделать задачу с высоким приоритетом готовой к выполнению, но по завершении ISR управление возвращается прерванной задаче. Новая высокоприоритетная задача запустится только тогда, когда текущая задача уступит ей процессор.
https://caxapa.ru/thumbs/212355/%B5COS-II_rus.pdf