Практическое занятие № 4
Кинематический расчет коробок скоростей
Цель: Научиться производить кинематический расчет коробок скоростей металлорежущих станков
Краткие теоретические сведения
Коробка скоростей металлорежущего станка предназначена для того, чтобы обеспечивать такой ряд выходящих скоростей, при котором можно вести обработку с оптимальными режимам. Например, для чистовых операций требуется высокая скорость шпинделя и малая подача, а для черновых операций – низкая скорость шпинделя и большая.
Широкий диапазон диаметров обрабатываемых изделий и инструментов, а также разнообразие сочетаний металлов пары инструмент-деталь требует широкого диапазона изменения выходной скорости и мелкого шага её измерения.
Другой важный аспект при конструировании приводов металлорежущих станков в обеспечении минимальной стоимости и объема коробки скоростей. Проектировки кинематических схем, определяющих основные технические характеристики современных металлорежущих станков, обычно ограничивается рассмотрением одного – двух вариантов, построенных часто по аналогии с существующими, при этом выбранная схема может значительно отличаться от оптимальной.
Кинематическим расчётом коробок скоростей обеспечивается закономерность в получении ряда частот вращения шпинделя. На кинематических схемах указываются числа зубьев зубчатых и червячных колёс и их модули, числа заходов червяков, шаги ходовых винтов, диаметры шкивов, мощности и частоты вращения валов двигателей.
С помощью последовательно включаемых групп передач достигается геометрический ряд частот вращения, который позволяет увеличивать диапазон регулирования привода, число ступеней скорости шпинделя и уменьшить число передач для настройки.
Для расчёта коробок скоростей применяются графоаналитический и аналитический методы.
В основном используется графоаналитический метод, который позволяет быстрее найти и сравнить возможные варианты решения. Преимущество этого метода заключается в наглядности и простоте.
Методика кинематического расчёта коробок скоростей
1. Прочесть кинематическую схему. Определить где находится источник движения, какие передачи учувствуют в передачи движения, где конечное звено или шпиндель.
Необходимо учесть следующие положения:
· все показанные на схеме элементы должны быть задействованы в работе;
· сумма зубьев вступающих в работу элементов двух соседних валов должна быть одинаковой (для зубчатых пар колес с одинаковым модулем);
· должна быть исключена возможность одновременной передачи двумя способами между соседними валами
2. Составляем уравнение кинематического баланса привода главного движения в развернутом виде
Уравнение кинематического баланса – это математическое выражение связи движений ведущего и ведомого элементов (начального и конечного звеньев) кинематической цепи станка. В него входят составляющие, характеризующие все элементы цепи от начального до конечного звена.
3. Определяем число ступеней регулирования m привода главного движения. Число ступеней регулирования определяется произведением числа групп передач.
4. Решаем уравнение кинематического баланса привода главного движения с помощью табличного способа
5. Определяем диапазон регулирования Rn, знаменатель ряда частот вращения φ, относительную потерю скорости А для привода главного движения.
Диапазон регулирования частот вращения шпинделя характеризует эксплуатационные возможности станка и определяется отношением наибольшей частоты вращения шпинделя станка к наименьшей:
Rп = n max /n min.
Значения частот вращения от n min до n max образуют ряд.
В станкостроении, как правило, применяют геометрический ряд, в котором смежные значения n различаются в φ раз (φ — знаменатель ряда: n 1 /n 2 = n 2 /n 3 = n 3 /n 4 =...= n φ-i /nj = φ).

При выборе знаменателя ряда необходимо учитывать следующее:
1) значения знаменателей ряда нормализованы;
2) отраслевой стандарт ОСТ 2 Н11-1-72 рекомендуют применять в основном знаменатели ряда φ = 1,26; 1,41;1,58;
3) при проектировании станков средних размеров в большинстве случаев принимают значения знаменателя ряда φ = 1,26 или φ =1,41, так как они обеспечивают необходимые эксплуатационные условия;
4) если в цепи привода предусмотрены сменные зубчатые колёса, то можно принимать значения знаменателя ряда φ = 1,06; 1,12 и 1,26. Это относиться в основном к станкам для массового и серийного производства, когда станок редко перестраивается;
5) в станках с большими диаметрами обрабатываемых деталей необходимо применять наименьшие значения ряда (1,06; 1,12 и 1,26), а в станках с малыми диаметрами обрабатываемых деталей – большие (1,58 1,78);
6) желательно, чтобы число ступеней частот вращения было произведением множителей 2 и 3 (две или три передачи в группе, то есть между двумя валами), а также выполнялось условие
S=2Е1×3E2, где Е1 и Е2 – целые числа.
Этому условию соответствуют значения S=2,3,4,6,8,9,12,16,18,24,27,32,36;
7) в целях упрощения конструкции коробки скоростей можно применять многоскоростной электродвигатель, однако это не всегда целесообразно, так как при этом желательно иметь одинаковые значения знаменателя ряда у коробки и электродвигателя;
8) коробки скоростей универсальных станков должны иметь большее число ступеней скорости, меньшее значение знаменателя φ, так как они предназначаются для обработки многих деталей и для выполнения различных работ.
Коробка скоростей специального станка может иметь небольшое число ступеней скорости, так как эти станки создаются для обработки определенных деталей или же для выполнения отдельных операций.
Начальные звенья кинематической цепи в большинстве случаев имеют вращательное движение, конечные звенья получают как вращательное, так и прямолинейное движение.
Если начальное и конечное звенья оба вращаются, то уравнение кинематического баланса может быть представлено в следующем виде:

где nк – частота вращения конечного звена (шпинделя), об/мин;
nн – частота вращения начального звена (вала электродвигателя), об/мин;
i – передаточное отношение кинематической цепи.

где i1, i2, i3,..., in – передаточные отношения отдельных кинематических пар цепи.
Задание:
1. Ответить на контрольные вопросы:
1. Что обеспечивается кинематическим расчетом коробок скоростей
2. Дать определением уравнению кинематического баланса
3. Дать определение диапазону регулирования частот вращения и формулу для его определения
4. Прописать методику кинематического расчёта коробок скоростей
5. Что учитывают при выборе знаменателя ряда коробки скоростей
2. По представленной выше методике выполнить кинематический расчет коробки скоростей металлорежущих станков, согласно своему варианту.
Для расчета заполнить таблицу, относящуюся к своему варианту, под расчетом каждого передаточного отношения записать – понижающая или повышающая передача
3. Записать уравнение кинематического баланса для кинематической схемы коробки скоростей своего станка.
Вариант 1
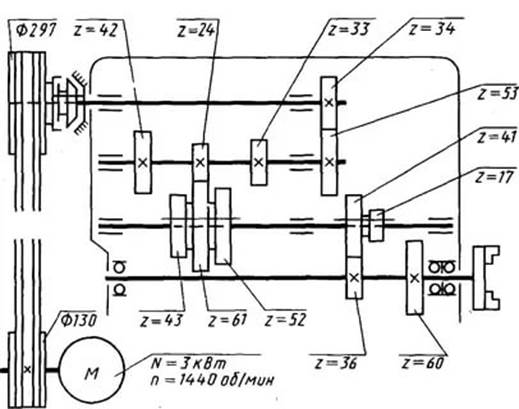
Выполнение работы Вариант 1:
| Чиcло оборотов двигателя nдв | i рп | n1 | i I | n1 | III-III | n2 | IIII-шп | nшп |
| Наименование передачи | ||||||||
Вариант 2
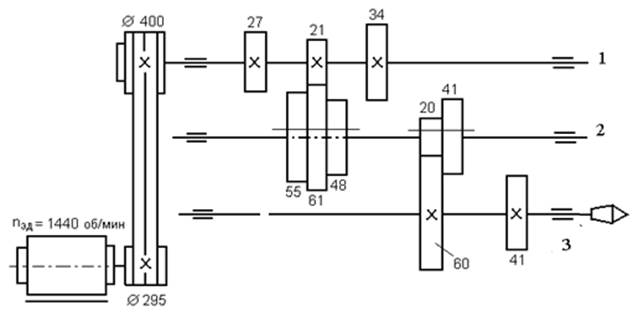
Выполнение работы Вариант 2:
| Чиcло оборотов двигателя nдв | i рп | n1 | II-II | n2 | III-шп | nшп |
| Наименование передачи | ||||||