Фирма Atmel Corp. (США), основанная в 1984 г. и имеющая достаточно широкий спектр деятельности в областях науки и техники, одним из основных направлений считает развитие вычислительных систем управления и контроля. В настоящий момент Atmel является одной из ведущих корпораций в области микроэлектроники таких направлений, как микроконтроллеры, производство энергонезависимых схем памяти, микросхем программируемой логики. Контроллеры разрабатывались не только для создания программ на языке низкого, но и высокого уровня. В качестве языка высокого уровня
был взят Си, поскольку именно Си является самым широко распространенным языком высокого уровня для разработки приложений для микроконтроллеров. Результатом проведения специальных научных исследований стало то, что получаемый объектный код для контроллера при трансляции с языка Си практически не обладает избыточностью. Флеш-память микроконтроллеров, созданных по КМОП-технологии, можно программировать посредством ISP, что допускает многократное перезаписывание памяти без каких-либо дополнительных устройств. Микроконтроллеры AVR (Advanced Virtual RISC)являются достаточно мощными, низкопотребляющими и гибкими устройствами, что в совокупности с низкой стоимостью определило их широкое распространение на мировом и российском рынках. В настоящее время AVR-контроллеры используются практически во всех областях производства: от Smart Card для персональных компьютеров до спутниковых навигационных систем. Различают следующие группы AVR-контроллеров:
Mega AVR (префикс ATmegaXXX);
Classic AVR (префикс AT90SXXX);
Tiny AVR (префикс ATtinyXXX);
AVR для Smart Card s (префикс AT90SCC).
Mega AVR имеют наибольшие объемы памяти, наибольшее количество
выводов и наиболее полный набор периферийных узлов
Classic AVR – группа, которая содержит микроконтроллеры с различным сочетанием периферийных узлов, имеет разные объемы встроенной п а-мяти и количество выводов.
Tiny AVR – дешевые кристаллы в 8 -выводных корпусах, способные
работать от источника пониженного напряжения и при этом обладающие т а-кими функционально важными периферийными узлами, как, например, АЦП.
AVR для Smart Cards – группа специализированных кристаллов, пре д-назначенных для работы в составе периферийных и сетевых адаптеров.
Микроконтроллер AVR содержит: быстрый RISC-процессор, два типа энергонезависимой памяти (Flash-память программ и память данных EEPROM), оперативную память RAM, порты ввода/вывода и различные периферийные интерфейсные схемы.

Основой микроконтроллеров AVR является 8-битное микропроцессорное ядро или центральное процессорное устройство (ЦПУ), построенное на принципах RISC-архитектуры. Основой этого блока служит арифметико-логическое устройство (АЛУ). По системному тактовому сигналу из памяти программ в соответствии с содержимым счетчика команд (Program Counter - PC) выбирается очередная команда и выполняется АЛУ. Во время выбора команды из памяти программ происходит выполнение предыдущей выбранной команды, что и позволяет достичь быстродействия 1 MIPS на 1 МГц. АЛУ подключено к регистрам общего назначения РОН (General Purpose Registers - GPR). Регистров общего назначения всего 32, они имеют байтовый формат, то есть каждый из них состоит из восьми бит. РОН находятся в начале адресного пространства оперативной памяти, но физически не являются ее частью. Поэтому к ним можно обращаться двумя способами (как к регистрам и как к памяти). Такое решение является особенностью AVR и повышает эффективность работы и производительность микроконтроллера.
Отличие между регистрами и оперативной памятью состоит в том, что с регистрами можно производить любые операции (арифметические, логические, битовые), а в оперативную память можно лишь записывать данные из регистров.
В микроконтроллерах AVR реализована Гарвардская архитектура, в соответствии с которой разделены не только адресные пространства памяти программ и памяти данных, но и шины доступа к ним. Каждая из областей памяти данных (оперативная память и EEPROM) также расположена в своем адресном пространстве.
Память программ (Flash ROM или Flash ПЗУ) Память программ предназначена для хранения последовательности команд, управляющих функционированием микроконтроллера, и имеет 16-ти битную организацию. Все AVR имеют Flash-память программ, которая может быть различного размера - от 1 до 256 КБайт. Ее главное достоинство в том, что она построена на принципе электрической перепрограммируемости, т. е. допускает многократное стирание и запись информации. Программа заносится во Flash-память AVR как с помощью обычного программатора, так и с помощью SPI-интерфейса, в том числе непосредственно на собранной плате. Возможностью внутрисхемного программирования (функция ISP) через коммуникационный интерфейс SPI обладают все микроконтроллеры AVR, кроме Tiny11 и Tiny28. Все микроконтроллеры семейства Mega имеют возможность самопрограммирования, т. е. самостоятельного изменения содержимого своей памяти программ. Эта особенность позволяет создавать на их основе очень гибкие системы, алгоритм работы которых будет меняться самим микроконтроллером в зависимости от каких-либо внутренних условий или внешних событий. Гарантированное число циклов перезаписи Flash-памяти у микроконтроллеров AVR второго поколения составляет не менее 10 тыс. циклов при типовом значении 100 тыс. циклов. (В официальной технической документации Atmel Corp. указывается значение 10 тыс. циклов.) Память данных Память данных разделена на три части: регистровая память, оперативная память (ОЗУ - оперативное запоминающее устройство или RAM) и энергонезависимая память (ЭСППЗУ или EEPROM). Регистровая память (РОН и РВВ) Регистровая память включает 32 регистра общего назначения (РОН или GPR), объединенных в файл, и служебные регистры ввода/вывода (РВВ). И те и другие расположены в адресном пространстве ОЗУ, но не являются его частью. В области регистров ввода/вывода расположены различные служебные регистры (регистры управления микроконтроллером, регистры состояния и т. п.), а также регистры управления периферийными устройствами, входящими в состав микроконтроллера. По сути, управление микроконтроллером заключается в управлении этими регистрами. Энергонезависимая память данных (EEPROM) Для долговременного хранения различной информации, которая может изменяться в процессе функционирования микроконтроллерной системы, используется EEPROM-память. Все AVR имеют блок энергонезависимой электрически перезаписываемой памяти данных EEPROM от 64 Байт до 4 КБайт. Этот тип памяти, доступный программе микроконтроллера непосредственно в ходе ее выполнения, удобен для хранения промежуточных данных, различных констант, коэффициентов, серийных номеров, ключей и т.п. EEPROM может быть загружена извне как через SPI интерфейс, так и с помощью обычного программатора. Число циклов стирание/запись - не менее 100 тыс. Оперативная память (ОЗУ или RAM) Внутренняя оперативная статическая память Static RAM (SRAM) имеет байтовый формат и используется для оперативного хранения данных. Размер оперативной памяти может варьироваться у различных чипов от 64 Байт до 4 КБайт. Число циклов чтения и записи в RAM не ограничено, но при отключении питающего напряжения вся информация теряется. Для некоторых микроконтроллеров возможна организация подключения внешнего статического ОЗУ объемом до 64К.
Периферия
Периферия микроконтроллеров AVR включает: порты (от 3 до 48 линий ввода и вывода), поддержку внешних прерываний, таймеры-счетчики, сторожевой таймер, аналоговые компараторы, 10-разрядный 8-канальный АЦП, интерфейсы UART, JTAG и SPI, устройство сброса по понижению питания, широтно-импульсные модуляторы. Порты ввода/вывода (I/O) Порты ввода/вывода AVR имеют число независимых линий "вход/выход" от 3 до 53. Каждая линия порта может быть запрограммирована на вход или на выход. Мощные выходные драйверы обеспечивают токовую нагрузочную способность 20 мА на линию порта (втекающий ток) при максимальном значении 40 мА, что позволяет, например, непосредственно подключать к микроконтроллеру светодиоды и биполярные транзисторы. Общая токовая нагрузка на все линии одного порта не должна превышать 80 мА (все значения приведены для напряжения питания 5 В). Архитектурная особенность построения портов ввода/вывода у AVR заключается в том, что для каждого физического вывода (пина) существует 3 бита контроля/управления, а не 2, как у распространенных 8-разрядных микроконтроллеров (Intel, Microchip, Motorola и т.д.). Это позволяет избежать необходимости иметь копию содержимого порта в памяти для безопасности и повышает скорость работы микроконтроллера при работе с внешними устройствами, особенно в условиях внешних электрических помех.
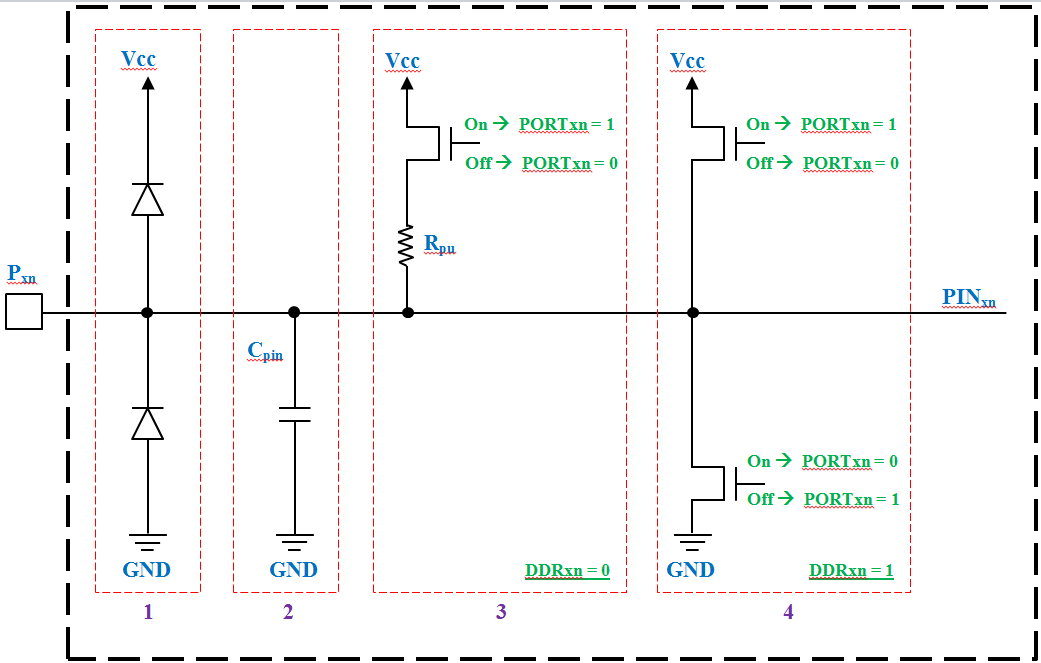 Pxn – имя ножки порта микроконтроллера, где x буква порта (A, B, C или D), n номер разряда порта (7… 0).
Cpin — паразитная емкость порта.
VCC — напряжение питания.
Rpu — отключаемый нагрузочный верхний резистор (pull-up).
PORTxn — бит n регистра PORTx.
PINxn — бит n регистра PINx.
DDRxn — бит n регистра DDRx. Каждый порт микроконтроллера AVR (обычно имеют имена A, B и иногда C или даже D) имеет 8 разрядов, каждый из которых привязан к определенной ножке корпуса. Каждый порт имеет три специальных регистра DDRx, PORTx и PINx (где x соответствует букве порта A, B, C или D). Назначение регистров:
DDRx – Настройка разрядов порта x на вход или выход.
PORTx – Управление состоянием выходов порта x (если соответствующий разряд настроен как выход), или подключением внутреннего pull-up резистора (если соответствующий разряд настроен как вход)
PINx –Чтение логических уровней разрядов порта x.
Состояние выхода зависит от комбинации бит в регистрах DDRxn и PORTxn
DDRxn PORTxn I/O Comment 0 0 I (Input) Вход Высокоимпендансный вход
0 1 I (Input) Вход Подтянуто внутренне сопротивление.
1 0 O (Output) Выход На выходе низкий уровень.
1 1 O (Output) Выход На выходе высокий уровень.
Прерывания (INTERRUPTS) Система прерываний - одна из важнейших частей микроконтроллера. Все микроконтроллеры AVR имеют многоуровневую систему прерываний. Для каждого такого события разрабатывается отдельная программа, которую называют подпрограммой обработки запроса на прерывание (для краткости - подпрограммой прерывания), и размещается в памяти программ. При возникновении события, вызывающего прерывание, микроконтроллер сохраняет содержимое счетчика команд, прерывает выполнение центральным процессором текущей программы и переходит к выполнению подпрограммы обработки прерывания. После выполнения подпрограммы прерывания осуществляется восстановление предварительно сохраненного счетчика команд и процессор возвращается к выполнению прерванной программы. Для каждого события может быть установлен приоритет. Понятие приоритет означает, что выполняемая подпрограмма прерывания может быть прервана другим событием только при условии, что оно имеет более высокий приоритет, чем текущее. В противном случае центральный процессор перейдет к обработке нового события только после окончания обработки предыдущего. Таймеры/счетчики (TIMER/COUNTERS) Микроконтроллеры AVR имеют в своем составе от 1 до 4 таймеров/счетчиков с разрядностью 8 или 16 бит, которые могут работать и как таймеры от внутреннего источника тактовой частоты, и как счетчики внешних событий. Их можно использовать для точного формирования временных интервалов, подсчета импульсов на выводах микроконтроллера, формирования последовательности импульсов, тактирования приемопередатчика последовательного канала связи. В режиме ШИМ (PWM) таймер/счетчик может представлять собой широтно-импульсный модулятор и используется для генерирования сигнала с программируемыми частотой и скважностью.
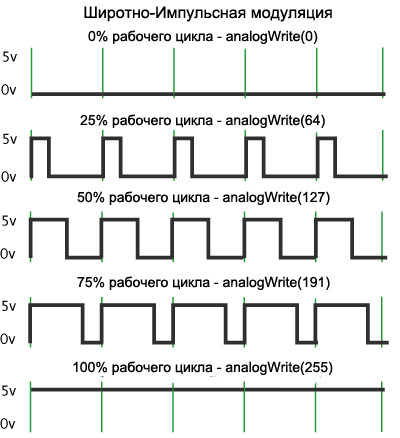
Широтно-Импульсная модуляция, или ШИМ, это операция получения изменяющегося аналогового значения посредством цифровых устройств. Устройства используются для получения прямоугольных импульсов - сигнала, который постоянно переключается между максимальным и минимальным значениями. Данный сигнал моделирует напряжение между максимальным значением (5 В) и минимальным (0 В), изменяя при этом длительность времени включения 5 В относительно включения 0 В. Длительность включения максимального значения называется шириной импульса. Для получения различных аналоговых величин изменяется ширина импульса. При достаточно быстрой смене периодов включения-выключения можно подавать постоянный сигнал между 0 и 5 В на светодиод, тем самым управляя яркостью его свечения.
На графике зеленые линии отмечают постоянные временные периоды. Длительность периода обратно пропорциональна частоте ШИМ. Т.е. если частота ШИМ составляет 500 Гц, то зеленые линии будут отмечать интервалы длительностью в 2 миллисекунды каждый. Вызов функции analogWrite() с масштабом 0 – 255 означает, что значение analogWrite(255) будет соответствовать 100% рабочему циклу (постоянное включение 5 В), а значение analogWrite(127) – 50% рабочему циклу.
Pxn – имя ножки порта микроконтроллера, где x буква порта (A, B, C или D), n номер разряда порта (7… 0).
Cpin — паразитная емкость порта.
VCC — напряжение питания.
Rpu — отключаемый нагрузочный верхний резистор (pull-up).
PORTxn — бит n регистра PORTx.
PINxn — бит n регистра PINx.
DDRxn — бит n регистра DDRx. Каждый порт микроконтроллера AVR (обычно имеют имена A, B и иногда C или даже D) имеет 8 разрядов, каждый из которых привязан к определенной ножке корпуса. Каждый порт имеет три специальных регистра DDRx, PORTx и PINx (где x соответствует букве порта A, B, C или D). Назначение регистров:
DDRx – Настройка разрядов порта x на вход или выход.
PORTx – Управление состоянием выходов порта x (если соответствующий разряд настроен как выход), или подключением внутреннего pull-up резистора (если соответствующий разряд настроен как вход)
PINx –Чтение логических уровней разрядов порта x.
Состояние выхода зависит от комбинации бит в регистрах DDRxn и PORTxn
DDRxn PORTxn I/O Comment 0 0 I (Input) Вход Высокоимпендансный вход
0 1 I (Input) Вход Подтянуто внутренне сопротивление.
1 0 O (Output) Выход На выходе низкий уровень.
1 1 O (Output) Выход На выходе высокий уровень.
Прерывания (INTERRUPTS) Система прерываний - одна из важнейших частей микроконтроллера. Все микроконтроллеры AVR имеют многоуровневую систему прерываний. Для каждого такого события разрабатывается отдельная программа, которую называют подпрограммой обработки запроса на прерывание (для краткости - подпрограммой прерывания), и размещается в памяти программ. При возникновении события, вызывающего прерывание, микроконтроллер сохраняет содержимое счетчика команд, прерывает выполнение центральным процессором текущей программы и переходит к выполнению подпрограммы обработки прерывания. После выполнения подпрограммы прерывания осуществляется восстановление предварительно сохраненного счетчика команд и процессор возвращается к выполнению прерванной программы. Для каждого события может быть установлен приоритет. Понятие приоритет означает, что выполняемая подпрограмма прерывания может быть прервана другим событием только при условии, что оно имеет более высокий приоритет, чем текущее. В противном случае центральный процессор перейдет к обработке нового события только после окончания обработки предыдущего. Таймеры/счетчики (TIMER/COUNTERS) Микроконтроллеры AVR имеют в своем составе от 1 до 4 таймеров/счетчиков с разрядностью 8 или 16 бит, которые могут работать и как таймеры от внутреннего источника тактовой частоты, и как счетчики внешних событий. Их можно использовать для точного формирования временных интервалов, подсчета импульсов на выводах микроконтроллера, формирования последовательности импульсов, тактирования приемопередатчика последовательного канала связи. В режиме ШИМ (PWM) таймер/счетчик может представлять собой широтно-импульсный модулятор и используется для генерирования сигнала с программируемыми частотой и скважностью.
Широтно-Импульсная модуляция, или ШИМ, это операция получения изменяющегося аналогового значения посредством цифровых устройств. Устройства используются для получения прямоугольных импульсов - сигнала, который постоянно переключается между максимальным и минимальным значениями. Данный сигнал моделирует напряжение между максимальным значением (5 В) и минимальным (0 В), изменяя при этом длительность времени включения 5 В относительно включения 0 В. Длительность включения максимального значения называется шириной импульса. Для получения различных аналоговых величин изменяется ширина импульса. При достаточно быстрой смене периодов включения-выключения можно подавать постоянный сигнал между 0 и 5 В на светодиод, тем самым управляя яркостью его свечения.
На графике зеленые линии отмечают постоянные временные периоды. Длительность периода обратно пропорциональна частоте ШИМ. Т.е. если частота ШИМ составляет 500 Гц, то зеленые линии будут отмечать интервалы длительностью в 2 миллисекунды каждый. Вызов функции analogWrite() с масштабом 0 – 255 означает, что значение analogWrite(255) будет соответствовать 100% рабочему циклу (постоянное включение 5 В), а значение analogWrite(127) – 50% рабочему циклу.
 Таймеры/счетчики способны вырабатывать запросы прерываний, переключая процессор на их обслуживание по событиям и освобождая его от необходимости периодического опроса состояния таймеров. Поскольку основное применение микроконтроллеры находят в системах реального времени, таймеры/счетчики являются одним из наиболее важных элементов. Сторожевой таймер (WDT) Сторожевой таймер (WatchDog Timer) предназначен для предотвращения катастрофических последствий от случайных сбоев программы. Он имеет свой собственный RC-генератор, работающий на частоте 1 МГц. Как и для основного внутреннего RC-генератора, значение 1 МГц является приближенным и зависит прежде всего от величины напряжения питания микроконтроллера и от температуры. Идея использования стоpожевого таймеpа предельно проста и состоит в pегуляpном его сбpасывании под упpавлением пpогpаммы или внешнего воздействия до того, как закончится его выдеpжка вpемени и не пpоизойдет сбpос пpоцессоpа. Если пpогpамма pаботает ноpмально, то команда сбpоса стоpожевого таймеpа должна pегуляpно выполняться, пpедохpаняя поцессоp от сбpоса. Если же микpопpоцессоp случайно вышел за пpеделы пpогpаммы (напpимеp, от сильной помехи по цепи питания) либо зациклился на каком-либо участке пpогpаммы, команда сбpоса стоpожевого таймеpа скоpее всего не будет выполнена в течение достаточного вpемени и пpоизойдет полный сбpос пpоцессоpа, инициализиpующий все pегистpы и пpиводящий систему в pабочее состояние.
Таймеры/счетчики способны вырабатывать запросы прерываний, переключая процессор на их обслуживание по событиям и освобождая его от необходимости периодического опроса состояния таймеров. Поскольку основное применение микроконтроллеры находят в системах реального времени, таймеры/счетчики являются одним из наиболее важных элементов. Сторожевой таймер (WDT) Сторожевой таймер (WatchDog Timer) предназначен для предотвращения катастрофических последствий от случайных сбоев программы. Он имеет свой собственный RC-генератор, работающий на частоте 1 МГц. Как и для основного внутреннего RC-генератора, значение 1 МГц является приближенным и зависит прежде всего от величины напряжения питания микроконтроллера и от температуры. Идея использования стоpожевого таймеpа предельно проста и состоит в pегуляpном его сбpасывании под упpавлением пpогpаммы или внешнего воздействия до того, как закончится его выдеpжка вpемени и не пpоизойдет сбpос пpоцессоpа. Если пpогpамма pаботает ноpмально, то команда сбpоса стоpожевого таймеpа должна pегуляpно выполняться, пpедохpаняя поцессоp от сбpоса. Если же микpопpоцессоp случайно вышел за пpеделы пpогpаммы (напpимеp, от сильной помехи по цепи питания) либо зациклился на каком-либо участке пpогpаммы, команда сбpоса стоpожевого таймеpа скоpее всего не будет выполнена в течение достаточного вpемени и пpоизойдет полный сбpос пpоцессоpа, инициализиpующий все pегистpы и пpиводящий систему в pабочее состояние.
 Аналоговый компаратор (AC) Аналоговый компаратор (Analog Comparator) сравнивает напряжения на двух выводах (пинах) микроконтроллера. Результатом сравнения будет логическое значение, которое может быть прочитано из программы. Выход аналогового компаратора можно включить на прерывание от аналогового компаратора. Пользователь может установить срабатывание прерывания по нарастающему или спадающему фронту или по переключению. Присутствует у всех современных AVR, кроме Mega8515 Аналоговый компаратор (AC) Аналоговый компаратор (Analog Comparator) сравнивает напряжения на двух выводах (пинах) микроконтроллера. Результатом сравнения будет логическое значение, которое может быть прочитано из программы. Выход аналогового компаратора можно включить на прерывание от аналогового компаратора. Пользователь может установить срабатывание прерывания по нарастающему или спадающему фронту или по переключению. Присутствует у всех современных AVR, кроме Mega8515
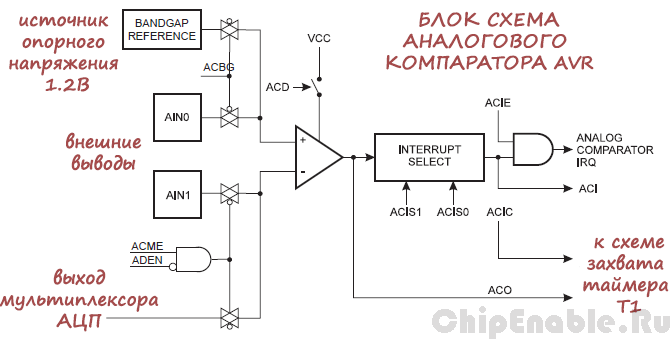
 Основной регистр управления компаратором - это ACSR (Analog Comparator Control and Status Register). Он задает конфигурацию компаратора и хранит статусные флаги.
ACD (Analog Comparator Disable) - включение компаратора. 1 - запрещает работу аналогового компаратора, 0 - разрешает. ACBG (Analog Comparator Bandgap Select) - подключение внутреннего источника опорного напряжения (ИОН) на 1.23 В к положительному входу компаратора (AIN0). 1 - подключает ИОН, 0 - отключает. ACO (Analog Comparator Output) - этот бит хранит состояние выхода аналогового компаратора, то есть результат сравнения входных напряжений. ACI (Analog Comparator Interrupt Flag) - флаг прерывания.. Если прерывания компаратора разрешены, то вызывается обработчик. ACIE (Analog Comparator Interrupt Enable) - разрешение прерываний компаратора. компаратор генерирует запрос на прерывание при изменении состояния его выхода. ACIC (Analog Comparator Input Capture Enable) - подключает выход компаратора к схеме захвата таймера Т1. 1 - выход компаратора подключен к схеме захвата, 0 - не подключен. ACIS1, ACIS0 (Analog Comparator Interrupt Mode Select) - эти биты определяют событие, по которому будет вызываться прерывание компаратора. Все варианты перечислены в таблице.
Аналого-цифровой преобразователь (A/D CONVERTER) Аналого-цифровой преобразователь (АЦП) служит для получения числового значения напряжения, поданного на его вход.
Основной регистр управления компаратором - это ACSR (Analog Comparator Control and Status Register). Он задает конфигурацию компаратора и хранит статусные флаги.
ACD (Analog Comparator Disable) - включение компаратора. 1 - запрещает работу аналогового компаратора, 0 - разрешает. ACBG (Analog Comparator Bandgap Select) - подключение внутреннего источника опорного напряжения (ИОН) на 1.23 В к положительному входу компаратора (AIN0). 1 - подключает ИОН, 0 - отключает. ACO (Analog Comparator Output) - этот бит хранит состояние выхода аналогового компаратора, то есть результат сравнения входных напряжений. ACI (Analog Comparator Interrupt Flag) - флаг прерывания.. Если прерывания компаратора разрешены, то вызывается обработчик. ACIE (Analog Comparator Interrupt Enable) - разрешение прерываний компаратора. компаратор генерирует запрос на прерывание при изменении состояния его выхода. ACIC (Analog Comparator Input Capture Enable) - подключает выход компаратора к схеме захвата таймера Т1. 1 - выход компаратора подключен к схеме захвата, 0 - не подключен. ACIS1, ACIS0 (Analog Comparator Interrupt Mode Select) - эти биты определяют событие, по которому будет вызываться прерывание компаратора. Все варианты перечислены в таблице.
Аналого-цифровой преобразователь (A/D CONVERTER) Аналого-цифровой преобразователь (АЦП) служит для получения числового значения напряжения, поданного на его вход.  Схема аналого-цифрового преобразователя
АЦП содержит 8-канальный аналоговый мультиплексор входных сигналов, регистр выбора входного сигнала ADMUX, 10-разрядный цифроаналоговый преобразователь (конвертер), 8-разрядный регистр управления и состояния ADCSR, 16-разрядный регистр данных, схему формирования запроса прерывания ADC СС, схему компаратора и предварительный делитель (ПД) тактовой частоты.
Преобразователь работает по методу последовательных приближений, формируя 10-разрядный двоичный код, размещаемый в регистре данных. Работа преобразователя выполняется на частоте от 50 до 200 кГц. Значение коэффициента деления задают с помощью трех разрядов ADPS2, ADPS1, ADPSO регистра управления ADCSR.
Результат преобразования, представляющий 10-разрядный двоичный код, размещается в старшей и младшей половинах регистра данных ADCH:ADCL.Преобразователь может работать в одиночном режиме либо в циклическом.
Универсальный последовательный приемопередатчик (UART или USART) Универсальный асинхронный или универсальный синхронно/асинхронный приемопередатчик (Universal Synchronous/Asynchronous Receiver and Transmitter - UART или USART) - удобный и простой последовательный интерфейс для организации информационного канала обмена микроконтроллера с внешним миром. Способен работать в дуплексном режиме (одновременная передача и прием данных). Он поддерживает протокол стандарта RS-232, что обеспечивает возможность организации связи с персональным компьютером. (Для стыковки МК и компьютера обязательно понадобится схема сопряжения уровней сигналов. Для этого существуют специальные микросхемы, например MAX232.)
AVR-микроконтроллеры содержат универсальный асинхронный приемопередатчик (Universal Asynchronous Receiver and Transmitter - UART). Также этот периферийный узел называют адаптером последовательного канала.
Управление приемопередатчиком осуществляется посредством двух регистров: регистра статуса USR и регистра управления UCR. Регистр статуса USR доступен только по чтению и обеспечивает информацию о состоянии UART. Регистр управления UCR предназначен для задания режимов работы UART и доступен как по чтению, так и по записи.
Схема аналого-цифрового преобразователя
АЦП содержит 8-канальный аналоговый мультиплексор входных сигналов, регистр выбора входного сигнала ADMUX, 10-разрядный цифроаналоговый преобразователь (конвертер), 8-разрядный регистр управления и состояния ADCSR, 16-разрядный регистр данных, схему формирования запроса прерывания ADC СС, схему компаратора и предварительный делитель (ПД) тактовой частоты.
Преобразователь работает по методу последовательных приближений, формируя 10-разрядный двоичный код, размещаемый в регистре данных. Работа преобразователя выполняется на частоте от 50 до 200 кГц. Значение коэффициента деления задают с помощью трех разрядов ADPS2, ADPS1, ADPSO регистра управления ADCSR.
Результат преобразования, представляющий 10-разрядный двоичный код, размещается в старшей и младшей половинах регистра данных ADCH:ADCL.Преобразователь может работать в одиночном режиме либо в циклическом.
Универсальный последовательный приемопередатчик (UART или USART) Универсальный асинхронный или универсальный синхронно/асинхронный приемопередатчик (Universal Synchronous/Asynchronous Receiver and Transmitter - UART или USART) - удобный и простой последовательный интерфейс для организации информационного канала обмена микроконтроллера с внешним миром. Способен работать в дуплексном режиме (одновременная передача и прием данных). Он поддерживает протокол стандарта RS-232, что обеспечивает возможность организации связи с персональным компьютером. (Для стыковки МК и компьютера обязательно понадобится схема сопряжения уровней сигналов. Для этого существуют специальные микросхемы, например MAX232.)
AVR-микроконтроллеры содержат универсальный асинхронный приемопередатчик (Universal Asynchronous Receiver and Transmitter - UART). Также этот периферийный узел называют адаптером последовательного канала.
Управление приемопередатчиком осуществляется посредством двух регистров: регистра статуса USR и регистра управления UCR. Регистр статуса USR доступен только по чтению и обеспечивает информацию о состоянии UART. Регистр управления UCR предназначен для задания режимов работы UART и доступен как по чтению, так и по записи.
 Программная модель приемника UART
Программная модель приемника UART
 Программная модель передатчика
Установка бит управления TXEN=1 (Transmitter Enable) и RXEN=1 (Receiver Enable) в регистре управления UCR разрешает соответственно передачу и прием данных по последовательному каналу. При этом выход передатчика и вход приемника соединяются с внешними выводами TXD и RXD AVR-микроконтроллера и настраиваются соответственно на выход и на вход независимо от установки бит в регистре направления данных порта DDRx. При сбросе TXEN и RXEN выводы TXD и RXD могут использоваться как обычные цифровые входы/выходы.
Последовательный периферийный интерфейс SPI Последовательный периферийный трехпроводный интерфейс SPI (Serial Peripheral Interface) предназначен для организации обмена данными между двумя устройствами. С его помощью может осуществляться обмен данными между микроконтроллером и различными устройствами, такими, как цифровые потенциометры, ЦАП/АЦП, FLASH-ПЗУ и др. С помощью этого интерфейса удобно производить обмен данными между несколькими микроконтроллерами AVR. Кроме того, через интерфейс SPI может осуществляться программирование микроконтроллера.В состав модуля SPI входят:
– 8-разрядный сдвиговый регистр SPDR, который принимает байт данных с шины данных микроконтроллера, сдвигает его вправо или влево с выдачей последовательного кода на вывод микроконтроллера, одновременно с выводом принимает последовательный код со входа микроконтроллера и через буферный регистр передает его на шину данных микроконтроллера;
– 8-разрядные регистр управления SPCR и регистр состояния SPSR; предварительный делитель частоты и схемы управления.
Программная модель передатчика
Установка бит управления TXEN=1 (Transmitter Enable) и RXEN=1 (Receiver Enable) в регистре управления UCR разрешает соответственно передачу и прием данных по последовательному каналу. При этом выход передатчика и вход приемника соединяются с внешними выводами TXD и RXD AVR-микроконтроллера и настраиваются соответственно на выход и на вход независимо от установки бит в регистре направления данных порта DDRx. При сбросе TXEN и RXEN выводы TXD и RXD могут использоваться как обычные цифровые входы/выходы.
Последовательный периферийный интерфейс SPI Последовательный периферийный трехпроводный интерфейс SPI (Serial Peripheral Interface) предназначен для организации обмена данными между двумя устройствами. С его помощью может осуществляться обмен данными между микроконтроллером и различными устройствами, такими, как цифровые потенциометры, ЦАП/АЦП, FLASH-ПЗУ и др. С помощью этого интерфейса удобно производить обмен данными между несколькими микроконтроллерами AVR. Кроме того, через интерфейс SPI может осуществляться программирование микроконтроллера.В состав модуля SPI входят:
– 8-разрядный сдвиговый регистр SPDR, который принимает байт данных с шины данных микроконтроллера, сдвигает его вправо или влево с выдачей последовательного кода на вывод микроконтроллера, одновременно с выводом принимает последовательный код со входа микроконтроллера и через буферный регистр передает его на шину данных микроконтроллера;
– 8-разрядные регистр управления SPCR и регистр состояния SPSR; предварительный делитель частоты и схемы управления.
 В микроконтроллерах АТх8515, например, для сигналов интерфейса SPI выделены четыре линии порта РВ: РВ5 – MOSI, РВ6 – MISO, PB7-SCK, PB4-;SS.
Вывод PB1(SCK) является выходом тактового сигнала ведущего микроконтроллера и входом тактового сигнала ведомого. По записи ведущим CPU данных в SPI регистр начинает работать тактовый генератор SPI и записанные данные сдвигаются через вывод выхода PB2(MOSI) ведущего микроконтроллера на вывод входа PB2 (MOSI) ведомого микроконтроллера. После сдвига одного байта тактовый генератор SPI останавливается, устанавливая флаг окончания передачи (SPIF). Если в регистре SPCR будет установлен бит разрешения прерывания SPI (SPIE), то произойдет запрос прерывания. Вход выбора ведомого PB0(SS), для выбора индивидуального SPI устройства в качестве ведомого, устанавливается на низкий уровень. При установке высокого уровня на выводе PB0(SS) порт SPI деактивируется и вывод PB2(MOSI) может быть использован в качестве вывода входа. Режим ведущий/ведомый может быть установлен и программным способом установкой или очисткой бита MSTR в регистре управления SPI.
Двухпроводной последовательный интерфейс TWI Двухпроводной последовательный интерфейс TWI (Two-wire Serial Interface) является полным аналогом базовой версии интерфейса I2C (двухпроводная двунаправленная шина) фирмы Philips. Этот интерфейс позволяет объединить вместе до 128 различных устройств с помощью двунаправленной шины, состоящей из линии тактового сигнала (SCL) и линии данных (SDA).Упрощенная структурная схема модуля приведена на рис. 5.17. Модуль содержит блок шинного интерфейса (SDA, SCL) с регистром данных TWDR и контроллером состояний Start/Stop, блок контроля адреса с регистром адреса TWAR и схемой сравнения, блок управления с регистрами управления TWCR и состояния TWSR, контроллер скорости передачи с предделителем и регистром скорости TWBR.
В микроконтроллерах АТх8515, например, для сигналов интерфейса SPI выделены четыре линии порта РВ: РВ5 – MOSI, РВ6 – MISO, PB7-SCK, PB4-;SS.
Вывод PB1(SCK) является выходом тактового сигнала ведущего микроконтроллера и входом тактового сигнала ведомого. По записи ведущим CPU данных в SPI регистр начинает работать тактовый генератор SPI и записанные данные сдвигаются через вывод выхода PB2(MOSI) ведущего микроконтроллера на вывод входа PB2 (MOSI) ведомого микроконтроллера. После сдвига одного байта тактовый генератор SPI останавливается, устанавливая флаг окончания передачи (SPIF). Если в регистре SPCR будет установлен бит разрешения прерывания SPI (SPIE), то произойдет запрос прерывания. Вход выбора ведомого PB0(SS), для выбора индивидуального SPI устройства в качестве ведомого, устанавливается на низкий уровень. При установке высокого уровня на выводе PB0(SS) порт SPI деактивируется и вывод PB2(MOSI) может быть использован в качестве вывода входа. Режим ведущий/ведомый может быть установлен и программным способом установкой или очисткой бита MSTR в регистре управления SPI.
Двухпроводной последовательный интерфейс TWI Двухпроводной последовательный интерфейс TWI (Two-wire Serial Interface) является полным аналогом базовой версии интерфейса I2C (двухпроводная двунаправленная шина) фирмы Philips. Этот интерфейс позволяет объединить вместе до 128 различных устройств с помощью двунаправленной шины, состоящей из линии тактового сигнала (SCL) и линии данных (SDA).Упрощенная структурная схема модуля приведена на рис. 5.17. Модуль содержит блок шинного интерфейса (SDA, SCL) с регистром данных TWDR и контроллером состояний Start/Stop, блок контроля адреса с регистром адреса TWAR и схемой сравнения, блок управления с регистрами управления TWCR и состояния TWSR, контроллер скорости передачи с предделителем и регистром скорости TWBR.  Структура модуля TWI.
Регистр данных TWDR обеспечивает параллельную загрузку байтов и последовательный вывод данных на линию SDA путем сдвига содержимого регистра влево в сторону старших разрядов.
Регистр адреса TWAR используется при работе микроконтроллера в качестве ведомого. Код, записанный в семи старших разрядах регистра, представляет собственный адрес микроконтроллера. Этот код сравнивается компаратором с адресом, поступающим в микроконтроллер при появлении адресного пакета в регистре TWDR.
Младший бит TWGCE регистра TWAR разрешает распознавание общих вызовов (обращений с адресом $00). Если разряд TWGCE = О, распознавание общих вызовов запрещено.
Управление работой порта осуществляется с помощью регистров TWCR (табл. 5.6) и TWSR (табл. 5.7). Структура модуля TWI.
Регистр данных TWDR обеспечивает параллельную загрузку байтов и последовательный вывод данных на линию SDA путем сдвига содержимого регистра влево в сторону старших разрядов.
Регистр адреса TWAR используется при работе микроконтроллера в качестве ведомого. Код, записанный в семи старших разрядах регистра, представляет собственный адрес микроконтроллера. Этот код сравнивается компаратором с адресом, поступающим в микроконтроллер при появлении адресного пакета в регистре TWDR.
Младший бит TWGCE регистра TWAR разрешает распознавание общих вызовов (обращений с адресом $00). Если разряд TWGCE = О, распознавание общих вызовов запрещено.
Управление работой порта осуществляется с помощью регистров TWCR (табл. 5.6) и TWSR (табл. 5.7).
 Биты регистра TWCR имеют следующее назначение:
TWEN – бит разрешения работы модуля TWI. При установке бита в состояние 1 выводы SDA, SCL подключаются к внешним выводам микроконтроллера РС1, РСО соответственно для всех ранее названных моделей микроконтроллеров, кроме ATmegaSx (выводы РС4, РС5) и Atmega 64х, 128x(PDl, PDO);
TWSTA – флаг состояния Start. При установке бита в единичное состояние микроконтроллер может сформировать состояние Start, если шина свободна. Если шина занята, модуль ожидает появления состояния Stop и лишь после этого захватывает шину, формируя состояние Start;
TWSTO – флаг состояния Stop. Установка флага в состояние 1 приводит к формированию на шине состояния Stop;
TWEA – бит разрешения подтверждения. При установке бита в 1 устройство формирует сигнал подтверждения, когда это необходимо;
TWIE и TWINT – флаги разрешения и прерывания от модуля TWI. Запрос прерывания генерируется, если TWINT = 1 и TWIE = = 1. Сброс флага TWINT может быть осуществлен только при записи в него логической 1;
TWWC – флаг, устанавливаемый в 1 при попытке записи в регистр данных TWDR, когда флаг прерывания TWINT сброшен.
Биты регистра TWSR:
TWS7…TWS3 – код состояния модуля TWI;
TWPS1:TWPS0 – коэффициент деления предделителя контроллера скорости передачи.
Контроллер скорости передачи формирует последовательность тактовых сигналов, поступающих на линию SCL. Частота формируемых сигналов зависит от коэффициентов деления TWBR и TWPS.
Применение микроконтроллеров ATMEL AVR (Atmega 328) на примере Arduino UNO
Общая информация о контроллере.
Биты регистра TWCR имеют следующее назначение:
TWEN – бит разрешения работы модуля TWI. При установке бита в состояние 1 выводы SDA, SCL подключаются к внешним выводам микроконтроллера РС1, РСО соответственно для всех ранее названных моделей микроконтроллеров, кроме ATmegaSx (выводы РС4, РС5) и Atmega 64х, 128x(PDl, PDO);
TWSTA – флаг состояния Start. При установке бита в единичное состояние микроконтроллер может сформировать состояние Start, если шина свободна. Если шина занята, модуль ожидает появления состояния Stop и лишь после этого захватывает шину, формируя состояние Start;
TWSTO – флаг состояния Stop. Установка флага в состояние 1 приводит к формированию на шине состояния Stop;
TWEA – бит разрешения подтверждения. При установке бита в 1 устройство формирует сигнал подтверждения, когда это необходимо;
TWIE и TWINT – флаги разрешения и прерывания от модуля TWI. Запрос прерывания генерируется, если TWINT = 1 и TWIE = = 1. Сброс флага TWINT может быть осуществлен только при записи в него логической 1;
TWWC – флаг, устанавливаемый в 1 при попытке записи в регистр данных TWDR, когда флаг прерывания TWINT сброшен.
Биты регистра TWSR:
TWS7…TWS3 – код состояния модуля TWI;
TWPS1:TWPS0 – коэффициент деления предделителя контроллера скорости передачи.
Контроллер скорости передачи формирует последовательность тактовых сигналов, поступающих на линию SCL. Частота формируемых сигналов зависит от коэффициентов деления TWBR и TWPS.
Применение микроконтроллеров ATMEL AVR (Atmega 328) на примере Arduino UNO
Общая информация о контроллере.
  Arduino UNO R3 выполнен на микроконтроллере ATmega328. У него:
Arduino UNO R3 выполнен на микроконтроллере ATmega328. У него:
|
Программирование.
Контроллер может программироваться из интегрированной среды программного обеспечения Ардуино (IDE). Программирование происходит под управлением резидентного загрузчика по протоколу STK500. Аппаратный программатор при этом не требуется.
Микроконтроллер можно запрограммировать через разъем для внутрисхемного программатора ICSP, не используя, загрузчик. Исходный код программы-загрузчика находится в свободном доступе.