На основе метода ИКД разработаны два типа многоканальных корректоров, представляющих собой электронные стимуляторы, обеспечивающие подачу стимулирующих сигналов в соответствующие фазы шага.
В настоящее время разработан восьмиканальный корректор движений, управляемый персональным компьютером. Главное его отличие от ранее применявшейся системы коррекции движений состоит в том, что этот корректор полностью адаптирован к темпу выполняемых движений.
Алгоритм работы корректора состоит в том, что измеряется длительность цикла между экстремальными значениями суставных углов и программируются фазы электростимуляции мышц в % к длительности цикла в соответствии с электромиографическим профилем мышц. Параметры ЭС: последовательность электрических прямоугольных импульсов по восьми каналам частотой 40 - 100 Гц, амплитудой от 30 до 255 мА (дискретность установки 1 мА), длительностью от 20 до 255 мкс (дискретность установки 1 мкс). Точность выполнения временной программы ЭС - 1% цикла предыдущего шага.
Портативные системы предназначены для использования средств ИКД с целью закрепления двигательных навыков, сформированных во время лечения в стационаре.
В 1987г. начат серийный выпуск портативного корректора движений, названного аппаратом ортопедическим АН8-27. Прибор предназначен для коррекции ходьбы больных с парезами ног и инвалидов на протезах нижних конечностей.
Ортопедический аппарат АН8-27 предназначен для коррекции элементов ходьбы больных с паралитическими заболеваниями нижних конечностей, а также для тренировки ослабленных мышц посредством их стимуляции при ходьбе и в покое с целью улучшения стояния и ходьбы больного.
Стимулятор питается от аккумулятора напряжением 9 В. Масса стимулятора 310 г. Габаритные размеры 124 х 93 х 43 мм.
Аппарат состоит из двухканального портативного электростимулятора, датчиков синхронизации стимуляции с фазами шага, электродов и креплений узлов аппарата на теле больного (см. рис. 1).
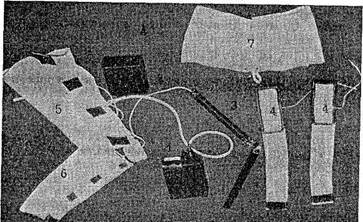
Рис. 1. Ортопедический аппарат АН8-27.
Основные части аппарата: 1—двухканальный электростимулятор, 2—зарядное устройство, 3—датчик синхронизации, 4 — электроды, 5 — манжета бедра, 6 — манжета голени, 7—бандаж.
Внутри пластмассового корпуса электростимулятора расположены печатная плата, источник питания — аккумуляторная батарея, подстроечные резисторы и переключатель режимов работы. На передней панели электростимулятора находятся элементы управления.
Переключатель предназначен для выбора режима работы электростимулятора: «Т» — тренировка, «К»— коррекция. Электроды и датчики синхронизации подключают к электростимулятору с помощью многоштырькового разъема. Для визуального контроля стимулирующего сигнала на выходе стимулятора на его передней панели находится световой индикатор.
В конструкции печатной платы предусмотрена возможность переключения входа узлов, задающих программу электростимуляции, к датчикам синхронизации в фазу сгибания или разгибания в суставе конечности. Для каждого больного по усмотрению врача осуществляется выбор фазы синхронизации. С помощью переключателя амплитуды напряжение стимулирующих импульсов можно устанавливать в пределах 30 или 60 В.
Внутри корпуса на печатной плате находятся подстроечные резисторы. С их помощью индивидуально подбирают задержку стимулирующих сигналов относительно момента синхронизации в пределах от 0,09 до 0,90 с, а также устанавливают частоту следования стимулирующих импульсов в диапазоне от 30 до 60 Гц и длительность стимуляции.
Датчик синхронизации представляет собой устройство контактного типа и содержит верхнюю и нижнюю бранши, соединенные осью вращения. На оси установлен кулачок, с помощью которого при заданной величине угла между браншами осуществляется включение контактного элемента. Вращением кулачка с последующей его фиксацией можно установить необходимый угол срабатывания датчика синхронизации.
Тканные электроды, имеющие многослойную структуру и содержащие токопроводящую ткань, укрепляют на теле больного над стимулируемой мышцей. Электроды имеют различные типоразмеры: от 30X30 мм до 60x260 мм (в зависимости от того, какие мышцы должны быть подвергнуты стимуляции).
Бранши датчиков и электроды крепят на больном с помощью эластичных манжеток голени и бедра и специального эластичного пояса, если электроды располагаются на тазовом поясе. При этом датчик синхронизации вставляют в кожаный карман, пришитый снаружи к манжеткам голени и бедра.
Методика проведения сеансов коррекции ходьбы с помощью аппарата АН8-27 принципиально не отличается от методики, применяемой на стационарной установке. После того как на больного надеты электроды, смоченные водой и зафиксированные манжетками, и укреплен датчик синхронизации, осуществляют выбор амплитудной и временной программ ЭС паретичных мышц. Интенсивность ЭС мышц определяется тремя параметрами: амплитудой напряжения электрического сигнала, частотой следования и длительностью стимулирующих импульсов. Сначала устанавливают величину амплитуды напряжения, дискретно изменяя ее от 30 до 60 В при минимальной длительности импульса, затем плавно увеличивают длительность импульса до достижения необходимой степени сокращения мышц. Обычно подбирают такую интенсивность ЭС мышц, которая при кратковременном применении (не дольше 0,6 с) обеспечивает отчетливую коррекцию движений при ходьбе. Частота следования импульсов при этом должна быть равна 50—60 Гц.
Временную программу выбирают с учетом вида стимулируемой мышцы и темпа ходьбы. Определение временной программы состоит в установке необходимого угла синхронизации, выборе фазы синхронизации, длительности задержки и самой стимуляции. Все эти параметры должны быть установлены техником совместно с врачом стационара протезно-ортопедического предприятия в процессе протезирования аппаратом АН8-27. Для этого на предприятии необходимо иметь установку, позволяющую вывести угол датчика и отметки начала и конца серии стимулирующих импульсов на электронно-лучевой осциллограф. Полученные техником замеры параметров ЭС затем переносят па портативный электростимулятор.