Предыстория:
Холодной осенью мы встретили Берштнейна. Товарищ был в нетрезвом состоянии. Заметя это, мы попытались отнять у него последнюю бутылку пива, потому что кому-то уже явно хватило (а нам вот нет). Но товарищ, ловко скоординировав все свои движения, применив все силы сенсорной коррекции, ловко перепрыгнул через наши мечты на отдых и побежал в неизведанном направлении, теряя по ходу движения обрывки монографии «О ловкости и её развитии».
Заворожённые непревзойдённой ловкостью товарища с бутылкой пива, мы отважились пуститься за ним вдогонку, начиная тернистый путь нашей деятельности, движимые целью найти вопросы к его монографии, подкреплённые мотивом стать выдающимися психологами (или же всё проще – экз сдавать не хотим, а пивка хотим.) погнали, как говорится.
Документ содержит вырезки из монографии Бернштейна «О ловкости и её развитии», доп. информацию с интернетной лужи и мои личные комментарии, взятые из лужи по-соседству.
Строго 18+.
Вопросы к монографии Н.А.БЕРНШТЕЙНА "О ЛОВКОСТИ И ЕЕ РАЗВИТИИ".M.,1991
(за исключением "Очерка III",стр.59 - 118)
1. Биологическое значение движений
Бесконечно больший интерес представляет, прежде всего, языкоглоточный речевой аппарат. Процесс речи – язык. Поле Брока – слева. То есть говорим мы – класс, отпад, люблю говорить.
По меткому и глубокому замечанию отца русской физиологии И. М. Сеченова, мы не просто видим нашими глазами — мы ими смотрим. Действительно, весь акт зрения от начала до конца активен
Говорит о том, какие мы с вами ребята классные. Обезьяны тип тоже ничё такие, номы то круче.
Рука человека, под руководством его мозга и в тесном сотрудничестве с ним, ввела в жизненный обиход на земле труд, но и труд зато внес в строение руки очень много изменений и усовершенствований.
Про пронацию и супинацию.
Пальцы кисти одни, помимо ее прочих частей, обладают 15 сочленениями, и если считать по отдельным направлениям подвижности (так называемым степеням свободы), то на долю пальцев одной руки их придется 20, понимая под каждым из направлений активную подвижность как туда, так и обратно. В целесообразных приспособительных движениях пальцев, в их быстроте, точности, ловкости человек в неизмеримое количеств раз превосходит наиболее высокоразвитых животных
Теперь о движе глаз:
В процессе «смотрения» наши глаза: 1) движутся по любому направлению следом за движущимся предметом; 2) движутся при этом точно согласованно, то строго параллельно, то сводясь в той или иной степени; 3) намеренно сводятся для устранения «двоения» изображения в глазах и для оценки расстояния до предмета (так называемое стереоскопическое зрение); 4) одновременно регулируют «наводку на фокус» хрусталиков; 5) при этом все время управляют шириною просвета зрачка, отмеряя для нервных элементов глазного дна точно такое количество света, какое им нужно для наиболее ясного видения; 6) наконец, как уже упоминалось, сами активно обходят и ощупывают взглядом предметы, водят взором вдоль строчек читаемой книги и т. д. Все эти движения совершаются одновременно и дружно, не сбивая друг друга, совершаются совершенно автоматически, но отнюдь не машинообразно, по какому-нибудь неизменном шаблону, а с чрезвычайно большой и ловкой приспособительностью.
Так было с описываемой задачей — распределять внимание между десятками и сотнями видов подвижности и стройно согласовывать все их между собою. Такова первая трудность управления двигательным аппара том нашего
Органы нашего тела очень трудны для управления.
2. Чем отличается двигательная система живых существ от технических устройств
Таким образом, в машинах указанного типа мы имеем дело, в сущности, с объединениями многих простых машин в каждой. Движения каждого из этих составляющих простых механизмов — одной клавиши пишущей машин ки с подключенным к ней буквенным рычажком или одного из шарниров стрелы подъемного крана — очень просты и, главное, однообразны; удивительны в работе описываемых машин разве, только то искусство и та ловкость, которые проявляются в действиях машиниста
Среди машин-автоматов есть агрегаты, самостоятельно проявляющие, высушивающие и печатающие только что засня тую кинопленку, изготавливающие бутылки, винты, папиросы, ткущие сложноузорные ковры и т. д. И самое поразительное, что эти огромные автоматы при всей их сложности и изобилии подвижных частей все имеют по однойединственной степени свободы, т. е. обладают тем, что в технике называют вынужденным движением. Это значит, что каждая движущаяся точка в этих машинах, каждая деталь рычага, тяги или колеса движется все время по одному и тому же строго определенному пути. Форма этого пути может быть очень разно образной: у одних точек (или деталей) круговой, у других прямолинейной, у третьих овальной и т. д., но с этого единствен ного пути движущаяся точка не сходит никогда. Таким образом, машины, неимоверно сложные по виду и устройству, в смысле своей подвижности принадлежат к числу самых простых систем, какие только могут существовать. Машины-автоматы, в которых подвижность какой-нибудь части исчислялась бы двумя степеня ми свободы, можно буквально сосчитать по пальцам (к таким машинам относятся, например, центробежные регуляторы у па ровых двигателей). А дальше двух степеней свободы никогда еще не заходило ни одно искусственное устройство.
Человек может совершать выбор, а машина нет, не хватает степеней свободы. (у нас то много их, ща вырезок про кисть, обалдеете: Пальцы кисти одни, помимо ее прочих частей, обладают 15 сочленениями, и если считать по отдельным направлениям подвижности (так называемым степеням свободы), то на долю пальцев одной руки их придется 20, понимая под каждым из направлений активную подвижность как туда, так и обратно.
Ловкость есть способность двигательно выйти из любого положения, т. е. способность справиться с любою возникшею двигательною задачей: 1) правильно (т. е. адекватно и точно), 2) быстро (т. е. скоро и споро), 3) рационально (т. е. целесообразно и экономично) и 4) находчиво (т. е. изворотливо и инициативно).
3. Что такое координация движений,по Бернштейну (на примере скованности
у новичков - спортсменов. музыкантов и др.)
Координация и есть не что иное, как преодоление избыточ ных степеней свободы наших органов движения, т. е. превраще ние их в управляемые системы. Степени свободы, упоминаемые в этом определении, могут быть, как уже сказано, кинематиче ские и динамические.
Оказывается, дело обстоит далеко не так, и чувствительные системы нашего тела загружаются при вы полнении того или другого движения не в меньшей степени, нежели двигательные.
Там этот поток чувстви тельных сигналов преобразуется в соответствующие коррекции к движению, т. е., в свою очередь, является причиной возникно вения новых двигательных импульсов, исправленных и дополнен ных, снова мчащихся из мозга в нужные мышцы. Перед нами, таким образом, замкнутый кольцевой процесс — то, что в нерв ной физиологии называется рефлекторным кольцом. Разрыв такого кольца в любом месте приводит к полному распаду дви жения, как это подтверждает богатый материал заболеваний нервной системы.
Центральная нервная система исходит только из целесообразности: если такие-то виды коррекций, наиболее под ходящие по качеству для управления данным движением или его частью, имеются в числе средств и возможностей такого-то органа чувств, она немедленно мобилизует этот орган для сен сорных коррекций по этому движению. Таким образом, все виды чувствительности бывают (в различных случаях и в большей или меньшей мере) в роли проприоцепторов в широком или функци ональном смысле этого слова.
В области спорта здесь напрашивается пример велосипеда. Двухколесный велосипед, конечно, несколько труднее для управления, чем трехколесный, но кто хоть раз попробовал езду на нем и одолел вступительную трудность, тот, наверное, уже никогда не захочет пересесть на трехколесный. Не только потому, что двухколесный легче весом, а главное, потому, что в руках опытного ездока он и поворотливее, и гибче, и, как это ни странно, устойчивее трехколесного. Другой сходный пример представляют коньки: «легкие» детские коньки с широким лезвием типа «снегурочки» и острые, более трудные для овладения ими норвежские беговые. В области музыкальных инструментов интересно, что грубые струнные инструменты вроде балалайки имеют на своих грифах так называемые лады, помогающие новичку не фальшивить; тонкий инструмент сходного типа, скрипка, имеет совершенно гладкий гриф, но ни один уважающий себя мастер игры на скрипке не согласится играть на скрипке с ладами. Ему не нужны внешние «костыли», так как он с гораздо большей уверенностью опирается на,свой слух, на «орган чувств», всегда и везде являющийся основным верным средством к преодолении избыточных степеней свободы
Я не всекла, что за пример с музыкантами и спортсменами, если знаете, сообщите главному редактору, очень надо.
4. Виды сил,влияющих на ход движения
контролирование движений посредством органов чувств.
Движения локомоций — ходьбы, бега, прыжка и т. п. — представляют собой огромные синергии. В них стройно и дружно сообща работают сотни мышц. Однако главная трудность управления и увязки в таких движениях не в этом. Благодаря многосуставности подвижных цепей тела и богатству их степеня ми свободы между всеми частями этих цепей — стопами, голеня ми, бедрами, предплечьями, плечами и т. д. — разыгрывается при движениях огромное количество сил взаимодействия. Особенно значительно нарастает и количество и величина этих сил при мало-мальски быстрых движениях. Доказано, что при увеличении темпа силы этого рода возрастают пропорционально квадрату темпа, иначе говоря, увеличение темпа в два или три раза вызывает возрастание этих сил соответственно в четыре или в девять раз и т. д. Эти силы взаимодействия — иначе го воря, силы отдачи из одних звеньев тела в другие—носят название реактивных сил.
Реактивные силы при больших синергиях вроде бега, прыж ка или сальто настолько велики и разнообразны, что создают иногда почти нерешимые задачи по увязке такого рода объемис тых, быстрых движений. Они противодействуют усилиям мышц, расталкивают между собой звенья, относят их в совсем нежела тельных направлениях и т. д.
Зато, как показывают более точные наблюдения, биодина мика делает нам в отношении этих движений неожиданный и очень ценный подарок. Оказывается, среди немногочисленных выполнимых форм каждого подобного движения существует сов сем уж малая кучка форм, отличающихся крайне важной осо бенностью. Движение оформляется при них так, что реактивные силы не только не сбивают, а, наоборот, прямо поддерживают его, сообщают ему особенную устойчивость.
Я в монографии нашла ток две силы, о которых говорит наш великий физиолог, в интернетике же нарыла во что:
Рассмотрим факторы, которые, по мнению Бернштейна, оказывают влияние на ход выполнения движения.
Во-первых, это реактивные силы. И рассматривал пример: например, если человек сильно взмахнет рукой, то в других частях тела у него разовьются реактивные силы, которые изменят их положение и тонус.
Во-вторых, это инерционные силы. Если человек резко поднимет руку, то она взлетает вверх не только за счет тех моторных импульсов, которые посланы в мышцы, но с какого-то момента движется по инерции, т. е. возникают определенные инерционные силы. Н. А. Бернштейн считал, что явление инерции присутствует в любом движении. (есть оч маленький отрывок про мышцы, где инерция упоминается: «Слиянию пулеметной дроби сокращений анизоэлементов в плавные движения помогает и вязкость той студенистой полужидкости (так называемой саркоплазмы), которая наполняет «капоты» мышечных волоконец, и упругость сухожилий и связок, и, наконец, инерция самих органов движения, играющих здесь роль махового колеса.»
В-третьих, это внешние силы, которые оказывают влияние на ход выполнения движения. Пример: если движение направлено на какой-либо предмет, то оно встречает с его стороны сопротивление. И это сопротивление чаще всего оказывается непредсказуемым.
5. Ловкость: определение.виды и измерения
Ловкость - двигательное мастерство и находчивость. это очень сложный психофизический комплекс. (даже у ловкости комлексы есть……)
Ловкость состоит в том, чтобы суметь двигательно выйти из любого положения, найтись (двигательно) при любых обстоятельствах.
Каждое движение или действие, которое мы не колеблясь признаем выполненным ловко, построено непременно не менее чем на двух уровнях.
При этом ведущий уровень этого ловко выполненного движения или действия обнаруживает яркие, стоящие выше заурядного качества переключаемости, находчивости, маневренности, а подслаивающий эти движения фоновый уровень — столь же яркие качества слаженности, послушности и точности работы.
Внимание, Бернштейн в душе поэт сто проц, зацените метафору:
Ловкость станет возможной тогда, когда всадник изобретателен и находчив, а его конь послушен и точно исполнителен.
Итак, реальные, ощутительные проявления ловкости начинаются у человека с уровня пространства (С). Опираясь на только что указанное общее свойство ловких двигательных актов, мы можем теперь выделить два вида ловкости. Первый из ни относится к движениям, ведущимся на уровне пространства (С) и подкрепленным фонами из уровня В*. Этот вид мы называем телесной ловкостью. Второй вид ловкости проявляется в действиях из последнего рассмотренного нами уровня D, со столь же обязательными фонами из обоих подуровней пространства (С), а иногда и из уровня В в придачу. Этот вид мы обозначаем названиями ручная или предметная ловкость.
Ща примеры: Сестра нежно, быстро и ловко перебинтовала мучительно болевшую руку: (D/ C1, B)
На всем скаку, свесившись с коня почти до земли, ты зубами выхватил воткнутую в неё свою самооценку после физхима: (D/ C2, B)
Тут ещё уровень адвансед: хирург – (D/ C1,C2, B)
Ловкость — это качество или способность, которая определяет отношение нашей нервной системы к навыкам. От степени двигательной ловкости зависит, насколько быстро и успешно сможет соорудиться у человека тот или иной двигательный навык и насколько высокого совершенства он сумеет достигнуть. И упражняемость и лов кость, несомненно, представляют собою упражняемые качества, но как та, так и другая стоят над всеми навыками, подчиняя их себе и определяя их существенные свойства.
проявления ловкости на два разряда, или вида, ловкости. Те проявления ловкости, которые имеют место в. движениях уровня пространства (С) и обеспечиваются надеж ными широкими фонами уровня мышечно-суставных увязок (В), мы называли телесною ловкостью. Ставя буквенный знак ведущего уровня в числителе, а знак фонового в знаменателе дроби, мы получили для проявлений телесной ловкости сим вол Ловкости, выявляющейся в действиях уровня D и опираю щейся на фоны из разных нижележащих уровней, мы дали название ручной, или предметной, ловкости.
определение ловкости. Мы охарактеризовали ее как двигательную способность быстро найти правильный выход из любого положения, найтись (двигательно) при любых обстоятельствах.
найти нужный выход из внезапного изменения обстановки.
Итак, к материалу, собранному нами о ловкости, прибави лись две важные характеристические черты. Мы установили, что ловкость всегда обращена на внешний мир и что она всегда и везде экспромтна
При плохой, неумелой, неловкой работе непременно делается много лишних движений.
6. Принцип сенсорной коррекции
Корректировка — слово, происходящее от того же латинского корня, что и слова ≪коррекция≫ — поправка, ≪корректура≫ — исправление ошибок наборав печатаемой книге, ≪корректный≫ — правильный. Из принципа сенсорных коррекций следует одна интересная вещь. Привычно и общепринято думать, что выполнение произвольного движения — полностью дело двигательных систем нашего организма: мышц — как непосредственных двигателей, двигательных нервов, передающих в мышцы приказы (импульсы) к движению от спинного и головного мозга; наконец, так называемых двигательных центров мозга, откуда исходят эти приказы- импульсы к мышцам. Оказывается, дело обстоит далеко не так, и чувствительные системы нашего тела загружаются при выполнении того или другого движения не в меньшей степени, нежели двигательные. По чувствительным нервам всевозможных специальностей: осязательным, зрительным, нервам мышечно- суставной чувствительности, вестибулярным нервам уха, несущим сигналы, связанные с чувством равновесия и т. д., — текут непрерывные корректировочные потоки сигналов к мозгу, уведомляющие его, так ли течет начатое движение, как оно было спланировано, и в каком смысле требуются поправки. Каждая мышца, сокращаясь по ходу движения, раздражает этим какой- нибудь из чувствительных аппаратов, который немедленно сигнализирует об этом мозгу. Это значит, что органы чувств должны все время сигнализировать мозгу о том, как протекает предпринятое движение, и обеспечить этим возможность немедленно вносить в него требуемые поправки (коррекции).
Точность зависит от сенсомоторнрй коррекции
Антеципация, т. е. заблаговременные, предваряющие коррекции, имеет огромное значение в координации движений. Она позволяет заранее рассчитать, например, в какой точке мы стол нулись бы с едущим наперерез автомобилем, и целесообразно изменить наш путь. Она позволяет оценить, как и куда полетит бросаемый партнером мяч, чтобы загодя подготовить ожидающую его ракетку. Она дает возможность учесть находящееся впереди препятствие задолго до того, как мы дошли до него, и изменить курс своей ходьбы так, чтобы обогнуть его
Особенно ярко проявляется вся ценность ан теципации во всякого рода действиях борьбы.
Антеципация, т.е. предугадывание как намерений партнера, так и последствий своих собственных движений, образует уже своего рода мостик для перехода к самым высоким формам ловкости. Эти наиболее совершенные, чисто человеческие формы подходят под ту мерку, которая получила выше название инициативности.
С инета: принцип коррекций сенсорных
— использование для регуляции моторного, исполнительного процесса связи обратной в виде сенсорных сигналов, касающихся особенностей построения движения. При этом сенсорные сигналы интегрируются в целостные комплексы, специфические для каждого уровня построения движений. Название имеет в виду коррекции, вносимые в управляющие мышцами моторные импульсы на основе информации сенсорной о ходе движения. Дело в том, что результат сложного движения зависит не только от собственно управляющих сигналов, но и от, целого ряда дополнительных факторов. Все они вносят отклонения в запланированный ход движения, а сами не поддаются предварительному учету. В результате цель движения может достигаться, только если в него постоянно будут вноситься поправки, коррекции. А для этого в системе нервной центральной должны непрерывно поступать афферентные сигналы, информирующие о реальном ходе движения, кои затем перерабатываются в сигналы коррекции.
Сенсорный опыт, накопленный при решении двигательной задачи, вносит существенный вкладе формирование образа движения, имеющего специфический профессиональный характер (плавность, точность, стабильность). Это явление изучено Н. А. Бернштейном.
7. Принцип рефлекторного кольца. В чем недостаточность "рефлекторной дуги "
Из принципа сенсорных коррекций следует одна интересная вещь. Привычно и общепринято думать, что выполнение произвольного движения — полностью дело двигательных систем нашего организма: мышц — как непосредственных двигателей, двигательных нервов, передающих в мышцы приказы (импульсы) к движению от спинного и головного мозга; наконец, так называемых двигательных центров мозга, откуда исходят эти приказы- импульсы к мышцам. Оказывается, дело обстоит далеко не так, и чувствительные системы нашего тела загружаются при выполнении того или другого движения не в меньшей степени, нежели двигательные. По чувствительным нервам всевозможных специальностей: осязательным, зрительным, нервам мышечно- суставной чувствительности, вестибулярным нервам уха, несущим сигналы, связанные с чувством равновесия и т. д., — текут непрерывные корректировочные потоки сигналов к мозгу, уведомляющие его, так ли течет начатое движение, как оно было
спланировано, и в каком смысле требуются поправки. Каждая мышца, сокращаясь по ходу движения, раздражает этим какой- нибудь из чувствительных аппаратов, который немедленно сигнализирует об этом мозгу. Каждый залп двигательных импульсов, прибывающих из мозга в мышцу, оказывается прямой причиной нового залпа импульсов, текущих уже в обратную сторону — от чувствительного аппарата в мозг. Там этот поток чувствительных сигналов преобразуется в соответствующие коррекции к движению, т. е., в свою очередь, является причиной возникновения новых двигательных импульсов, исправленных и дополненных, снова мчащихся из мозга в нужные мышцы.
Каждый залп двигательных импульсов, прибывающих из мозга в мышцу, оказывается прямой причиной нового залпа импульсов, текущих уже в обратную сторону —
от чувствительного аппарата в мозг. Там этот поток чувствительных сигналов преобразуется в соответствующие коррекции к движению, т. е., в свою очередь, является причиной возникновения новых двигательных импульсов, исправленных и дополненных, снова мчащихся из мозга в нужные мышцы. Перед нами, таким образом, замкнутый кольцевой процесс — то, что в нервной физиологии называется рефлекторным кольцом.
Про то, почему рефлекторная дуга отстой:
Первый вывод, к которому пришел Н. А. Бернштейн, состоял в том, что так не может осуществляться сколько-нибудь сложное движение, дуга не канает, ребят. Вообще говоря, очень простое движение, например, коленный рефлекс или отдергивание руки от огня, может произойти в результате прямого проведения моторных команд от центра к периферии. Но сложные двигательные акты, которые призваны решить какую-то задачу, достичь какого-то результата, так строиться не могут. Главная причина состоит в том, что результат любого сложного движения зависит не только от собственно управляющих сигналов, но и от целого ряда дополнительных факторов
Все они вносят отклонения в запланированный ход движения, сами же не поддаются предварительному учету. В результате окончательная цель движения может быть достигнута, только если в него будут постоянно вноситься поправки, или коррекции. А для этого ЦНС должна знать, какова реальная судьба текущего движения. Иными словами, в ЦНС должны непрерывно поступать афферентные сигналы, содержащие информацию о реальном ходе движения, а затем перерабатываться в сигналы коррекции.
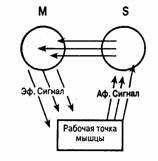
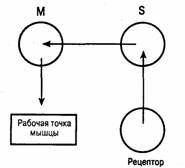
Принцип работы кольца (кхм очка): В упрощенном виде эта схема выглядит так: из моторного центра (М) в мышцу (рабочую точку мышцы) поступают эффекторные команды. От рабочей точки мышцы идут афферентные сигналы обратной связи в сенсорный центр. В ЦНС происходит переработка поступившей информации, т. е. перешифровка ее в моторные сигналы коррекции, после чего сигналы вновь поступают в мышцу. Получается кольцевой процесс управления
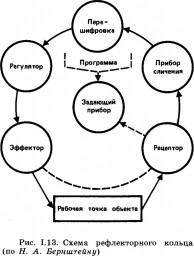
С наличием большего количества элементов рефлекторное кольцо функционирует таким образом: в программе записаны последовательные этапы сложного движения. В каждый конкретный момент отрабатывается какой-то частный этап или элемент, соответствующая частная программа запускается в задающий прибор. Из задающего прибора сигналы (SW — «то, что должно быть») поступают на прибор сличения. На тот же блок от рецептора приходят сигналы обратной связи (IW — «то, что есть»), сообщающие о состоянии рабочей точки. В приборе сличения эти сигналы сравниваются, и на выходе из него получаются сигналы рассогласования (В\У) между требуемым и фактическим положением вещей. Далее они попадают на блок перешифровки, откуда выходят сигналы коррекции, которые через промежуточные инстанции (регулятор) попадают на эффектор.
В данной схеме, по мнению Бернштейна необходимо обратить внимание на одну деталь: рецептор не всегда посылает сигналы на прибор сличения и бывают случаи, когда сигнал поступает сразу на задающий прибор. Это бывает в тех случаях, когда экономичнее перестроить движение, чем его корректировать. Это особенно важно в экстренных ситуациях.
8. Что такое обратная связь? Почему невозможно управлять движением без текущей обратной связи
Для выполнения того или другого движения мозг не только посылает определенную «команду» к мышцам, но и получает от периферийных органов чувств сигналы о достигнутых результатах и на их основании дает новые, корректирующие «команды ». Таким образом, происходит процесс построения движений, в котором между мозгом и периферийной нервной системой существует не только прямая, но и обратная связь
Существует целый перечень факторов, оказывающих непосредственное воздействие на ход выполнения движения. Центральной нервной системе, по мнению Бернштейна необходима постоянная информация о ходе выполнения движения. Эта информация получила название сигналов обратной связи. Эти сигналы могут одновременно поступать от мышц в мозг по нескольким каналам. Он приводит пример: когда мы двигаемся, информация о положении отдельных частей тела поступает от проприоцептивных рецепторов. Однако параллельно информация поступает через органы зрения. Аналогичная картина наблюдается даже при выполнении речевых движений. Человек получает информацию не только от рецепторов, контролирующих движения языкового аппарата, но и через слух. Причем информация, поступающая по разным каналам, должна быть согласованной, иначе выполнение движения становится невозможным.
Без текущей обратной связи ничего не будет функционировать, это как ты у Наенко спрашиваешь, что в таблицу нужно конкретно вообще, что вам от нас нужно, она молчит говорит, ну мол, вы там разберитесь, и всё. Ничего никому не пнятно, получается лажа, ребят.
9. Что такое "потребное будущее"
В основе всего научного творчества Н. А. Бернштейна лежит его новое понимание жизнедеятельности организма. Организм рассматривается им не как пассивная реактивная система, отвечающая на внешние стимулы и приспосабливающаяся к условиям среды (так считали мыслители периода «классического » механицизма в физиологии), а как созданная в процессе эволюции активная целеустремленная система. Действия этого организма направлены каждый раз на удовлетворение своих потребностей, на достижение определенной цели, которую Н. А. Бернштейн образно назвал «моделью потребного будущего ». Иначе говоря, процесс жизни есть не «уравновешивание с окружающей средой», а преодоление этой среды. Он направлен не на сохранение статуса, а на движение в сторону родовой программы развития и самообеспечения. Таким образом, живой организм — это противящаяся энтропии, неэнтропийная система. (А он футурист, однако)
Будущее это круто, пойдёмте в будущее.
С интернета: Бернштейн предположил, что движение направляется «моделью потребного будущего» как одного из существенных звеньев двигательной программы. Залогом получения запрограммированного результата (наиболее существенного и биологически важного для организма) в вероятностно организованной среде является достаточно высокая вариабельность способов его достижения. «Образ потребного будущего» предшествует действию, направляя его в соответствии с настоящим и вероятностным прогнозом развития. Причем он может как осознаваться, так и не осознаваться субъектом. Бернштейн писал: «... целесообразно спрограммировать действие возможно только на основании определенного образа или модели того, к чему это действие должно привести и ради чего оно предпринимается. Но так как предстоящее может быть расценено или предвидено не иначе, как в порядке вероятностного прогнозирования (удачный термин И. М. Фейгенберга), то ясно, что подход к анализу всех вскрывшихся здесь физиологических процессов должен основываться на теории вероятностей и ее новейших ветвях»
10. Понятие двигательной задачи
Двигательные задачи, которые животным приходилось решать, становились все более трудными и разнообразными. Именно двигательные задачи, двигательные потребности, неумолимая жизненная необходимость двигаться все проворнее, все точнее, все ловче — вот что было ведущим началом в развитии мозга и всех его вспомогательных органов
Ловкость — это способность справиться с двигательной задачей правильно. Ловкость требу ется там, где возникшая перед нами двигательная задача обла дает рядом осложнений, но во всех случаях предполагается, что, несмотря на эти осложнения, мы сумеем с ее помощью успешно, правильно решить эту задачу. Что значит правильное выполнение движения? У этого понятия есть явственные качественная и количественная стороны. Правильно сделанное движение — это движение, которое действительно приводит к требуемой цели, решает возникшую задачу. Правильное движение — это движение, которое делает то, что нужно.
Как только перед нами возникает новая двигательная задача, первый вопрос — это, конечно, вопрос о ее опекуне, о ведущем уровне, на ответственное попечение которого она достанется. Однако у нормального взрослого человека этот вопрос можно считать уже предрешенным для всякой новой задачи. Можно без колебаний сказать, что нет такой двигательной задачи, с которой человек впервые встретился бы уже взрослым и которая не потребовала бы от него ведущего управления уровня действий (D), по крайней мере на первое время.
Как только перед нами возникает новая двигательная задача, первый вопрос — это, конечно, вопрос о ее опекуне, о ведущем уровне, на ответственное попечение которого она достанется. Однако у нормального взрослого человека этот вопрос можно считать уже предрешенным для всякой новой задачи. Можно без колебаний сказать, что нет такой двигательной задачи, с которой человек впервые встретился бы уже взрослым и которая не потребовала бы от него ведущего управления уровне действий (D), по крайней мере на первое время.
Задача зачастую состоит не только в том, чтобы быстро найти нужный прием. Иногда наши двигательные уровни настолько богаты, что в состоянии предложить не один, а целых три выхода из положения, ни один из которых не хуже других. Но в этом случае чрезмерная находчивость может принести вред вместо пользы, если мы не сумеем сразу и без колебаний выбрать один определенный план действий и последовать ему. Если вспомнить, что речь идет о движениях и о составных частях движений, так что на такой выбор отпускаются считанные мгновения, то все значение быстроты решимости и умения без колебаний остаться при раз принятом решении станет вполне ясным.
Происхождение описываемых движений-звеньев особенное. Каждый уровень построения сам строит свои движения для решения тех двигательных задач, которые ему под силу и по плечу: таким порядком нижний подуровень пространства (С1) строит локомоции, перекладывания и переносы вещей и т.п.; таким путем верхний подуровень пространства (С2) строит свои меткие броски, уколы, указывания, попадания и т.д.
Двигательные задачи, которые животным приходилось решать, становились все более трудными и разнообразными. Именно двигательные задачи, двигательные потребности, неумолимая жизненная необходимость двигаться все проворнее, все точнее, все ловче — вот что были ведущим началом в развитии мозга
Итак, каждый новый скачок в развитии двигательных устройств мозга — это прежде всего завоевание ключа к целому новому классу двигательных задач, до этого недоступных.
С интернета: выработки навыка заключается в открытии принципа решения двигательной задачи, т.е. обнаружении параметров движения, сигнализирующих, насколько верно оно выполняется, причем это решение проходит в несколько этапов. (потом про фазы построения движа)
11. Что такое построение движений,по Бернштейну
В управлении многими нашими движениями, в особенности движениями рук, как мы увидим в дальнейшем, важнейшее и господствующее место занимают как раз эти слитные, синтетические, как их называют, восприятии пространства, расстояний, величины и формы предметов.
В организации конкретного движения обычно участвует сразу несколько уровней: тот, на котором строится движение и все нижележащие. В каком-то смысле это похоже на войсковую операцию: общий ход её и задачи определяются на одном из уровней командования, в реализации операции обычно участвует этот уровень и нижележащие, заканчивая исполнителями (солдатами).
2. Одно и то же движение может строиться на разных ведущих уровнях (инициироваться разными уровнями), с разным качеством исполнения, но всё же одно и то же. Бег, например, может строиться на уровне C, D или E. В первом случае особенности бега почти не контролируются сознанием, в нём отражается простое "бегу" или "бегу туда-то". Во втором и третьем случаях контроль сознания за процессом бега значительно выше: контролируются конкретные особенности бега, связь с какими-то предметами (например футбольным мячом) или даже использование бега не для перемещения в пространстве, а для каких-то сложных задач (например тренер может изобразить своим бегом как бегает какой-то другой человек; в конце концов бегом можно - если очень захочется - даже передавать азбуку Морзе).
3. Уровни построения движения имеют "постоянное место прописки" в отдельных "слоях" центральной нервной системы, в которой выделяются уровни спинного мозга, продолговатого, подкорковых центров, коры. Каждый уровень связан со специфическими, филогенетически сложившимися моторными проявлениями, каждому уровню соответствует свой класс движений.
(взято из интернета, потому что листать эту книжечку, мои уровни построения движений уже отказываются)
12. Уровни построения движений, их виды и функции.чем определяется ведущий уровень.Примеры
Уровень тонуса А.
Самый древний. Рыбы. В более или менее чистом виде он выступает как ведущий уровень в те быстротечные доли секунды, пока длятся полетные фазы некоторых (но не всех) видов прыжков: стартового прыжка и прыжка с вышки в воду, прыжка на лыжах с трамплина и т. д. – свободное падение. Управляет туловищем и телом. (уровень B – конечности, но уровень А также может выступать при движении конечностями, но как фон) Выполняет тонические сокращения. еще важнее то, что они же могут очень тонко управлять возбудимостью Он обеспечивает всем конечностным мышцам тонус – фоновое напряжение. Очень тонко управлять возбудимостью.
Он делает с пусковыми клетками и мионами мышц противоположногодействия как раз то, что делают с цилиндрами паровых
машин их золотниковые механизмы. Как эти механизмы поочередно включают в работу один из цилиндров и выключают другой или другие, так и импульсы уровня А действуют через спинномозговые клетки на возбудимость мышц. Когда надо отключить разгибатель, спинномозговые клетки его мионов становятся невозбудимыми, а их тонус падает, т. е. длина и степень растяжимости увеличиваются; в следующей фазе движения — наоборот. Не требует особых разъя